An action server implements the behavior tree's ComputePathToPose interface and hosts various plugins of different algorithms to compute plans. More...
#include <nav2_planner/include/nav2_planner/planner_server.hpp>
Public Types | |
| using | PlannerMap = std::unordered_map< std::string, nav2_core::GlobalPlanner::Ptr > |
Public Member Functions | |
| PlannerServer (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A constructor for nav2_planner::PlannerServer. More... | |
| ~PlannerServer () | |
| A destructor for nav2_planner::PlannerServer. | |
| nav_msgs::msg::Path | getPlan (const geometry_msgs::msg::PoseStamped &start, const geometry_msgs::msg::PoseStamped &goal, const std::string &planner_id) |
| Method to get plan from the desired plugin. More... | |
 Public Member Functions inherited from nav2_util::LifecycleNode Public Member Functions inherited from nav2_util::LifecycleNode | |
| LifecycleNode (const std::string &node_name, const std::string &ns="", const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A lifecycle node constructor. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has no integer or floating point range constraints. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const floating_point_range fp_range, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has a floating point range constraint. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const integer_range int_range, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has an integer range constraint. More... | |
| std::shared_ptr< nav2_util::LifecycleNode > | shared_from_this () |
| Get a shared pointer of this. | |
| nav2_util::CallbackReturn | on_error (const rclcpp_lifecycle::State &) |
| Abstracted on_error state transition callback, since unimplemented as of 2020 in the managed ROS2 node state machine. More... | |
| virtual void | on_rcl_preshutdown () |
| Perform preshutdown activities before our Context is shutdown. Note that this is related to our Context's shutdown sequence, not the lifecycle node state machine. | |
| void | createBond () |
| Create bond connection to lifecycle manager. | |
| void | destroyBond () |
| Destroy bond connection to lifecycle manager. | |
Protected Types | |
| using | ActionToPose = nav2_msgs::action::ComputePathToPose |
| using | ActionThroughPoses = nav2_msgs::action::ComputePathThroughPoses |
| using | ActionServerToPose = nav2_util::SimpleActionServer< ActionToPose > |
| using | ActionServerThroughPoses = nav2_util::SimpleActionServer< ActionThroughPoses > |
Protected Member Functions | |
| nav2_util::CallbackReturn | on_configure (const rclcpp_lifecycle::State &state) override |
| Configure member variables and initializes planner. More... | |
| nav2_util::CallbackReturn | on_activate (const rclcpp_lifecycle::State &state) override |
| Activate member variables. More... | |
| nav2_util::CallbackReturn | on_deactivate (const rclcpp_lifecycle::State &state) override |
| Deactivate member variables. More... | |
| nav2_util::CallbackReturn | on_cleanup (const rclcpp_lifecycle::State &state) override |
| Reset member variables. More... | |
| nav2_util::CallbackReturn | on_shutdown (const rclcpp_lifecycle::State &state) override |
| Called when in shutdown state. More... | |
| template<typename T > | |
| bool | isServerInactive (std::unique_ptr< nav2_util::SimpleActionServer< T >> &action_server) |
| Check if an action server is valid / active. More... | |
| template<typename T > | |
| bool | isCancelRequested (std::unique_ptr< nav2_util::SimpleActionServer< T >> &action_server) |
| Check if an action server has a cancellation request pending. More... | |
| void | waitForCostmap () |
| Wait for costmap to be valid with updated sensor data or repopulate after a clearing recovery. Blocks until true without timeout. | |
| template<typename T > | |
| void | getPreemptedGoalIfRequested (std::unique_ptr< nav2_util::SimpleActionServer< T >> &action_server, typename std::shared_ptr< const typename T::Goal > goal) |
| Check if an action server has a preemption request and replaces the goal with the new preemption goal. More... | |
| template<typename T > | |
| bool | getStartPose (std::unique_ptr< nav2_util::SimpleActionServer< T >> &action_server, typename std::shared_ptr< const typename T::Goal > goal, geometry_msgs::msg::PoseStamped &start) |
| Get the starting pose from costmap or message, if valid. More... | |
| template<typename T > | |
| bool | transformPosesToGlobalFrame (std::unique_ptr< nav2_util::SimpleActionServer< T >> &action_server, geometry_msgs::msg::PoseStamped &curr_start, geometry_msgs::msg::PoseStamped &curr_goal) |
| Transform start and goal poses into the costmap global frame for path planning plugins to utilize. More... | |
| template<typename T > | |
| bool | validatePath (std::unique_ptr< nav2_util::SimpleActionServer< T >> &action_server, const geometry_msgs::msg::PoseStamped &curr_goal, const nav_msgs::msg::Path &path, const std::string &planner_id) |
| Validate that the path contains a meaningful path. More... | |
| void | computePlan () |
| The action server callback which calls planner to get the path ComputePathToPose. | |
| void | computePlanThroughPoses () |
| The action server callback which calls planner to get the path ComputePathThroughPoses. | |
| void | isPathValid (const std::shared_ptr< nav2_msgs::srv::IsPathValid::Request > request, std::shared_ptr< nav2_msgs::srv::IsPathValid::Response > response) |
| The service callback to determine if the path is still valid. More... | |
| void | publishPlan (const nav_msgs::msg::Path &path) |
| Publish a path for visualization purposes. More... | |
| rcl_interfaces::msg::SetParametersResult | dynamicParametersCallback (std::vector< rclcpp::Parameter > parameters) |
| Callback executed when a parameter change is detected. More... | |
| Protected Member Functions inherited from nav2_util::LifecycleNode | |
| void | printLifecycleNodeNotification () |
| Print notifications for lifecycle node. | |
| void | register_rcl_preshutdown_callback () |
| void | runCleanups () |
Protected Attributes | |
| std::unique_ptr< ActionServerToPose > | action_server_pose_ |
| std::unique_ptr< ActionServerThroughPoses > | action_server_poses_ |
| rclcpp::node_interfaces::OnSetParametersCallbackHandle::SharedPtr | dyn_params_handler_ |
| std::mutex | dynamic_params_lock_ |
| PlannerMap | planners_ |
| pluginlib::ClassLoader< nav2_core::GlobalPlanner > | gp_loader_ |
| std::vector< std::string > | default_ids_ |
| std::vector< std::string > | default_types_ |
| std::vector< std::string > | planner_ids_ |
| std::vector< std::string > | planner_types_ |
| double | max_planner_duration_ |
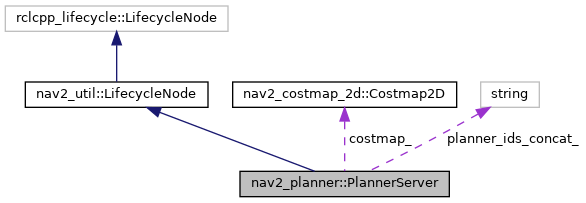
| std::string | planner_ids_concat_ |
| std::shared_ptr< tf2_ros::Buffer > | tf_ |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap_ros_ |
| std::unique_ptr< nav2_util::NodeThread > | costmap_thread_ |
| nav2_costmap_2d::Costmap2D * | costmap_ |
| std::unique_ptr< nav2_costmap_2d::FootprintCollisionChecker< nav2_costmap_2d::Costmap2D * > > | collision_checker_ |
| rclcpp_lifecycle::LifecyclePublisher< nav_msgs::msg::Path >::SharedPtr | plan_publisher_ |
| rclcpp::Service< nav2_msgs::srv::IsPathValid >::SharedPtr | is_path_valid_service_ |
| Protected Attributes inherited from nav2_util::LifecycleNode | |
| std::unique_ptr< rclcpp::PreShutdownCallbackHandle > | rcl_preshutdown_cb_handle_ {nullptr} |
| std::unique_ptr< bond::Bond > | bond_ {nullptr} |
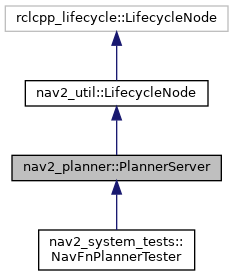
Detailed Description
An action server implements the behavior tree's ComputePathToPose interface and hosts various plugins of different algorithms to compute plans.
Definition at line 51 of file planner_server.hpp.
Constructor & Destructor Documentation
◆ PlannerServer()
|
explicit |
A constructor for nav2_planner::PlannerServer.
- Parameters
-
options Additional options to control creation of the node.
Definition at line 44 of file planner_server.cpp.
Member Function Documentation
◆ dynamicParametersCallback()
|
protected |
Callback executed when a parameter change is detected.
- Parameters
-
event ParameterEvent message
Definition at line 630 of file planner_server.cpp.
Referenced by on_activate().

◆ getPlan()
| nav_msgs::msg::Path nav2_planner::PlannerServer::getPlan | ( | const geometry_msgs::msg::PoseStamped & | start, |
| const geometry_msgs::msg::PoseStamped & | goal, | ||
| const std::string & | planner_id | ||
| ) |
Method to get plan from the desired plugin.
- Parameters
-
start starting pose goal goal request
- Returns
- Path
Definition at line 519 of file planner_server.cpp.
Referenced by computePlan(), and computePlanThroughPoses().

◆ getPreemptedGoalIfRequested()
|
protected |
Check if an action server has a preemption request and replaces the goal with the new preemption goal.
- Parameters
-
action_server Action server to get updated goal if required goal Goal to overwrite
Definition at line 297 of file planner_server.cpp.
Referenced by computePlan(), and computePlanThroughPoses().

◆ getStartPose()
|
protected |
Get the starting pose from costmap or message, if valid.
- Parameters
-
action_server Action server to terminate if required goal Goal to find start from start The starting pose to use
- Returns
- bool If successful in finding a valid starting pose
Definition at line 307 of file planner_server.cpp.
Referenced by computePlan(), and computePlanThroughPoses().

◆ isCancelRequested()
|
protected |
Check if an action server has a cancellation request pending.
- Parameters
-
action_server Action server to test
- Returns
- SUCCESS or FAILURE
Definition at line 284 of file planner_server.cpp.
Referenced by computePlan(), and computePlanThroughPoses().

◆ isPathValid()
|
protected |
The service callback to determine if the path is still valid.
- Parameters
-
request to the service response from the service
The lethal check starts at the closest point to avoid points that have already been passed and may have become occupied
Definition at line 558 of file planner_server.cpp.
References nav2_costmap_2d::Costmap2D::getCost(), and nav2_costmap_2d::Costmap2D::worldToMap().
Referenced by on_activate().


◆ isServerInactive()
|
protected |
Check if an action server is valid / active.
- Parameters
-
action_server Action server to test
- Returns
- SUCCESS or FAILURE
Definition at line 263 of file planner_server.cpp.
Referenced by computePlan(), and computePlanThroughPoses().

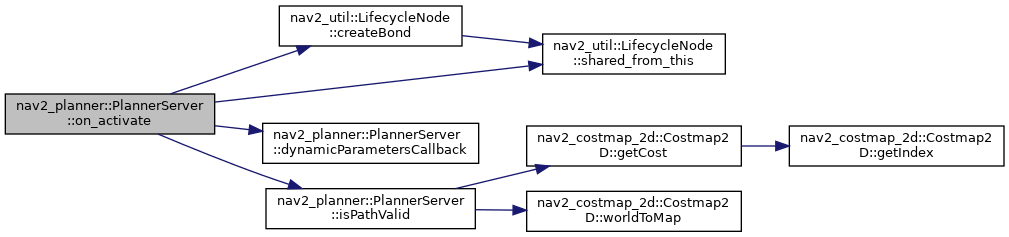
◆ on_activate()
|
overrideprotected |
Activate member variables.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 169 of file planner_server.cpp.
References nav2_util::LifecycleNode::createBond(), dynamicParametersCallback(), isPathValid(), and nav2_util::LifecycleNode::shared_from_this().
◆ on_cleanup()
|
overrideprotected |
Reset member variables.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 233 of file planner_server.cpp.
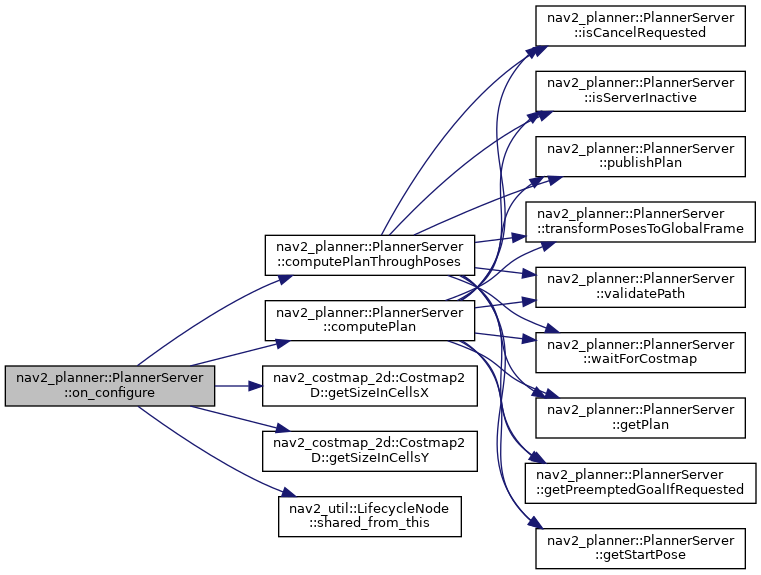
◆ on_configure()
|
overrideprotected |
Configure member variables and initializes planner.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 80 of file planner_server.cpp.
References computePlan(), computePlanThroughPoses(), nav2_costmap_2d::Costmap2D::getSizeInCellsX(), nav2_costmap_2d::Costmap2D::getSizeInCellsY(), and nav2_util::LifecycleNode::shared_from_this().
◆ on_deactivate()
|
overrideprotected |
Deactivate member variables.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 202 of file planner_server.cpp.
References nav2_util::LifecycleNode::destroyBond().

◆ on_shutdown()
|
overrideprotected |
Called when in shutdown state.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 256 of file planner_server.cpp.
◆ publishPlan()
|
protected |
Publish a path for visualization purposes.
- Parameters
-
path Reference to Global Path
Definition at line 550 of file planner_server.cpp.
Referenced by computePlan(), and computePlanThroughPoses().

◆ transformPosesToGlobalFrame()
|
protected |
Transform start and goal poses into the costmap global frame for path planning plugins to utilize.
- Parameters
-
action_server Action server to terminate if required start The starting pose to transform goal Goal pose to transform
- Returns
- bool If successful in transforming poses
Definition at line 323 of file planner_server.cpp.
Referenced by computePlan(), and computePlanThroughPoses().

◆ validatePath()
|
protected |
Validate that the path contains a meaningful path.
- Parameters
-
action_server Action server to terminate if required goal Goal Current goal path Current path planner_id The planner ID used to generate the path
- Returns
- bool If path is valid
Definition at line 341 of file planner_server.cpp.
Referenced by computePlan(), and computePlanThroughPoses().

The documentation for this class was generated from the following files:
- nav2_planner/include/nav2_planner/planner_server.hpp
- nav2_planner/src/planner_server.cpp