An action server wrapper to make applications simpler using Actions. More...
#include <nav2_util/include/nav2_util/simple_action_server.hpp>
Public Types | |
| typedef std::function< void()> | ExecuteCallback |
| typedef std::function< void()> | CompletionCallback |
Public Member Functions | |
| template<typename NodeT > | |
| SimpleActionServer (NodeT node, const std::string &action_name, ExecuteCallback execute_callback, CompletionCallback completion_callback=nullptr, std::chrono::milliseconds server_timeout=std::chrono::milliseconds(500), bool spin_thread=false, const rcl_action_server_options_t &options=rcl_action_server_get_default_options()) | |
| An constructor for SimpleActionServer. More... | |
| SimpleActionServer (rclcpp::node_interfaces::NodeBaseInterface::SharedPtr node_base_interface, rclcpp::node_interfaces::NodeClockInterface::SharedPtr node_clock_interface, rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr node_logging_interface, rclcpp::node_interfaces::NodeWaitablesInterface::SharedPtr node_waitables_interface, const std::string &action_name, ExecuteCallback execute_callback, CompletionCallback completion_callback=nullptr, std::chrono::milliseconds server_timeout=std::chrono::milliseconds(500), bool spin_thread=false, const rcl_action_server_options_t &options=rcl_action_server_get_default_options()) | |
| An constructor for SimpleActionServer. More... | |
| rclcpp_action::GoalResponse | handle_goal (const rclcpp_action::GoalUUID &, std::shared_ptr< const typename ActionT::Goal >) |
| handle the goal requested: accept or reject. This implementation always accepts. More... | |
| rclcpp_action::CancelResponse | handle_cancel (const std::shared_ptr< rclcpp_action::ServerGoalHandle< ActionT >> handle) |
| Accepts cancellation requests of action server. More... | |
| void | handle_accepted (const std::shared_ptr< rclcpp_action::ServerGoalHandle< ActionT >> handle) |
| Handles accepted goals and adds to preempted queue to switch to. More... | |
| void | work () |
| Computed background work and processes stop requests. | |
| void | activate () |
| Active action server. | |
| void | deactivate () |
| Deactive action server. | |
| bool | is_running () |
| Whether the action server is munching on a goal. More... | |
| bool | is_server_active () |
| Whether the action server is active or not. More... | |
| bool | is_preempt_requested () const |
| Whether the action server has been asked to be preempted with a new goal. More... | |
| const std::shared_ptr< const typename ActionT::Goal > | accept_pending_goal () |
| Accept pending goals. More... | |
| void | terminate_pending_goal () |
| Terminate pending goals. | |
| const std::shared_ptr< const typename ActionT::Goal > | get_current_goal () const |
| Get the current goal object. More... | |
| const rclcpp_action::GoalUUID | get_current_goal_id () const |
| const std::shared_ptr< const typename ActionT::Goal > | get_pending_goal () const |
| Get the pending goal object. More... | |
| bool | is_cancel_requested () const |
| Whether or not a cancel command has come in. More... | |
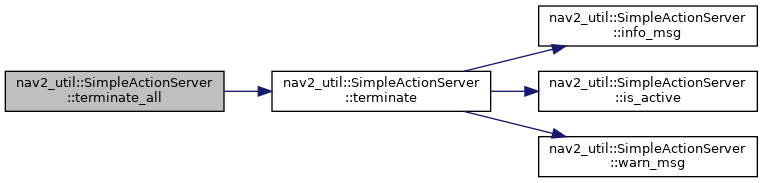
| void | terminate_all (typename std::shared_ptr< typename ActionT::Result > result=std::make_shared< typename ActionT::Result >()) |
| Terminate all pending and active actions. More... | |
| void | terminate_current (typename std::shared_ptr< typename ActionT::Result > result=std::make_shared< typename ActionT::Result >()) |
| Terminate the active action. More... | |
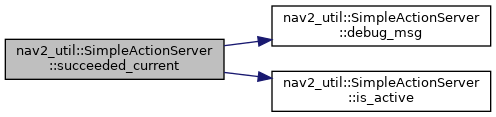
| void | succeeded_current (typename std::shared_ptr< typename ActionT::Result > result=std::make_shared< typename ActionT::Result >()) |
| Return success of the active action. More... | |
| void | publish_feedback (typename std::shared_ptr< typename ActionT::Feedback > feedback) |
| Publish feedback to the action server clients. More... | |
Protected Member Functions | |
| constexpr auto | empty_result () const |
| Generate an empty result object for an action type. | |
| constexpr bool | is_active (const std::shared_ptr< rclcpp_action::ServerGoalHandle< ActionT >> handle) const |
| Whether a given goal handle is currently active. More... | |
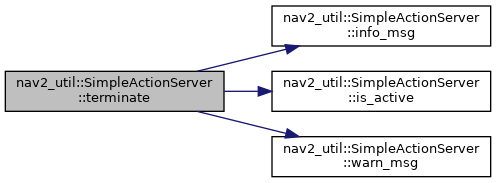
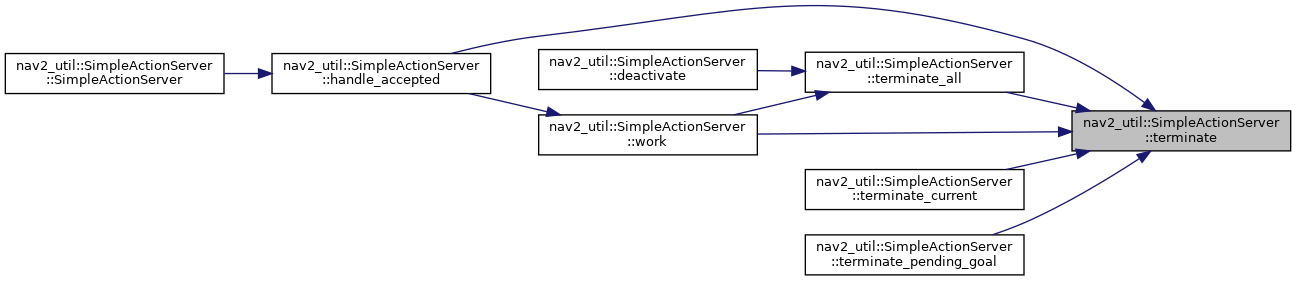
| void | terminate (std::shared_ptr< rclcpp_action::ServerGoalHandle< ActionT >> &handle, typename std::shared_ptr< typename ActionT::Result > result=std::make_shared< typename ActionT::Result >()) |
| Terminate a particular action with a result. More... | |
| void | info_msg (const std::string &msg) const |
| Info logging. | |
| void | debug_msg (const std::string &msg) const |
| Debug logging. | |
| void | error_msg (const std::string &msg) const |
| Error logging. | |
| void | warn_msg (const std::string &msg) const |
| Warn logging. | |
Protected Attributes | |
| rclcpp::node_interfaces::NodeBaseInterface::SharedPtr | node_base_interface_ |
| rclcpp::node_interfaces::NodeClockInterface::SharedPtr | node_clock_interface_ |
| rclcpp::node_interfaces::NodeLoggingInterface::SharedPtr | node_logging_interface_ |
| rclcpp::node_interfaces::NodeWaitablesInterface::SharedPtr | node_waitables_interface_ |
| std::string | action_name_ |
| ExecuteCallback | execute_callback_ |
| CompletionCallback | completion_callback_ |
| std::future< void > | execution_future_ |
| bool | stop_execution_ {false} |
| std::recursive_mutex | update_mutex_ |
| bool | server_active_ {false} |
| bool | preempt_requested_ {false} |
| std::chrono::milliseconds | server_timeout_ |
| std::shared_ptr< rclcpp_action::ServerGoalHandle< ActionT > > | current_handle_ |
| std::shared_ptr< rclcpp_action::ServerGoalHandle< ActionT > > | pending_handle_ |
| rclcpp_action::Server< ActionT >::SharedPtr | action_server_ |
| bool | spin_thread_ |
| rclcpp::CallbackGroup::SharedPtr | callback_group_ {nullptr} |
| rclcpp::executors::SingleThreadedExecutor::SharedPtr | executor_ |
| std::unique_ptr< nav2_util::NodeThread > | executor_thread_ |
Detailed Description
template<typename ActionT>
class nav2_util::SimpleActionServer< ActionT >
An action server wrapper to make applications simpler using Actions.
Definition at line 37 of file simple_action_server.hpp.
Constructor & Destructor Documentation
◆ SimpleActionServer() [1/2]
|
inlineexplicit |
An constructor for SimpleActionServer.
- Parameters
-
node Ptr to node to make actions action_name Name of the action to call execute_callback Execution callback function of Action server_timeout Timeout to to react to stop or preemption requests spin_thread Whether to spin with a dedicated thread internally options Options to pass to the underlying rcl_action_server_t
Definition at line 62 of file simple_action_server.hpp.
◆ SimpleActionServer() [2/2]
|
inlineexplicit |
An constructor for SimpleActionServer.
- Parameters
-
<node interfaces> Abstract node interfaces to make actions action_name Name of the action to call execute_callback Execution callback function of Action server_timeout Timeout to to react to stop or preemption requests spin_thread Whether to spin with a dedicated thread internally options Options to pass to the underlying rcl_action_server_t
Definition at line 87 of file simple_action_server.hpp.
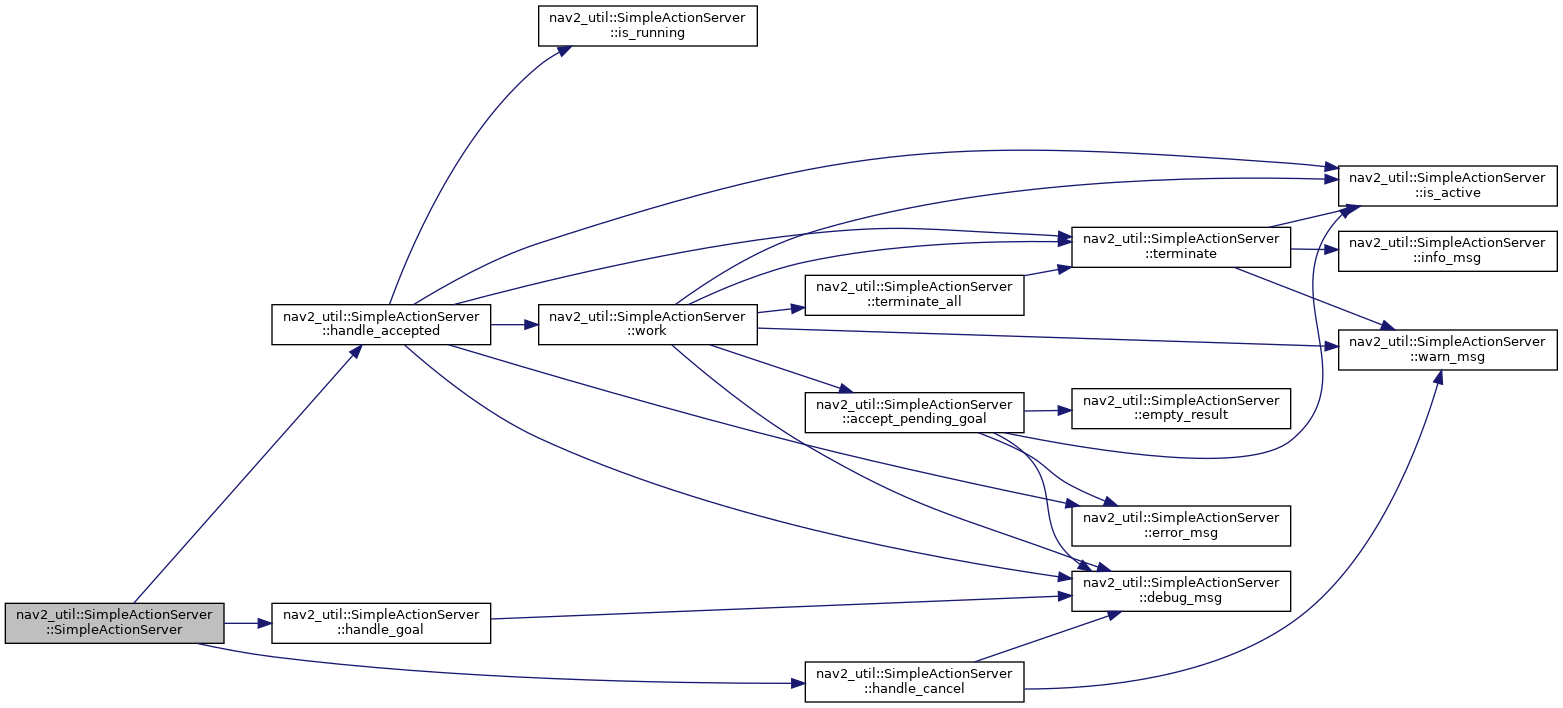
References nav2_util::SimpleActionServer< ActionT >::handle_accepted(), nav2_util::SimpleActionServer< ActionT >::handle_cancel(), and nav2_util::SimpleActionServer< ActionT >::handle_goal().
Member Function Documentation
◆ accept_pending_goal()
|
inline |
Accept pending goals.
- Returns
- Goal Ptr to the goal that's going to be accepted
Definition at line 336 of file simple_action_server.hpp.
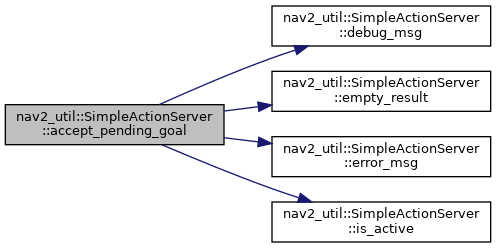
References nav2_util::SimpleActionServer< ActionT >::debug_msg(), nav2_util::SimpleActionServer< ActionT >::empty_result(), nav2_util::SimpleActionServer< ActionT >::error_msg(), and nav2_util::SimpleActionServer< ActionT >::is_active().
Referenced by nav2_util::SimpleActionServer< ActionT >::work().

◆ get_current_goal()
|
inline |
Get the current goal object.
- Returns
- Goal Ptr to the goal that's being processed currently
Definition at line 381 of file simple_action_server.hpp.
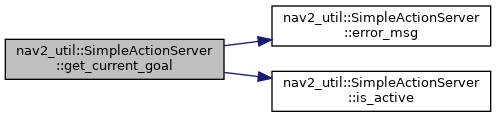
References nav2_util::SimpleActionServer< ActionT >::error_msg(), and nav2_util::SimpleActionServer< ActionT >::is_active().
◆ get_pending_goal()
|
inline |
Get the pending goal object.
- Returns
- Goal Ptr to the goal that's pending
Definition at line 409 of file simple_action_server.hpp.
References nav2_util::SimpleActionServer< ActionT >::error_msg().

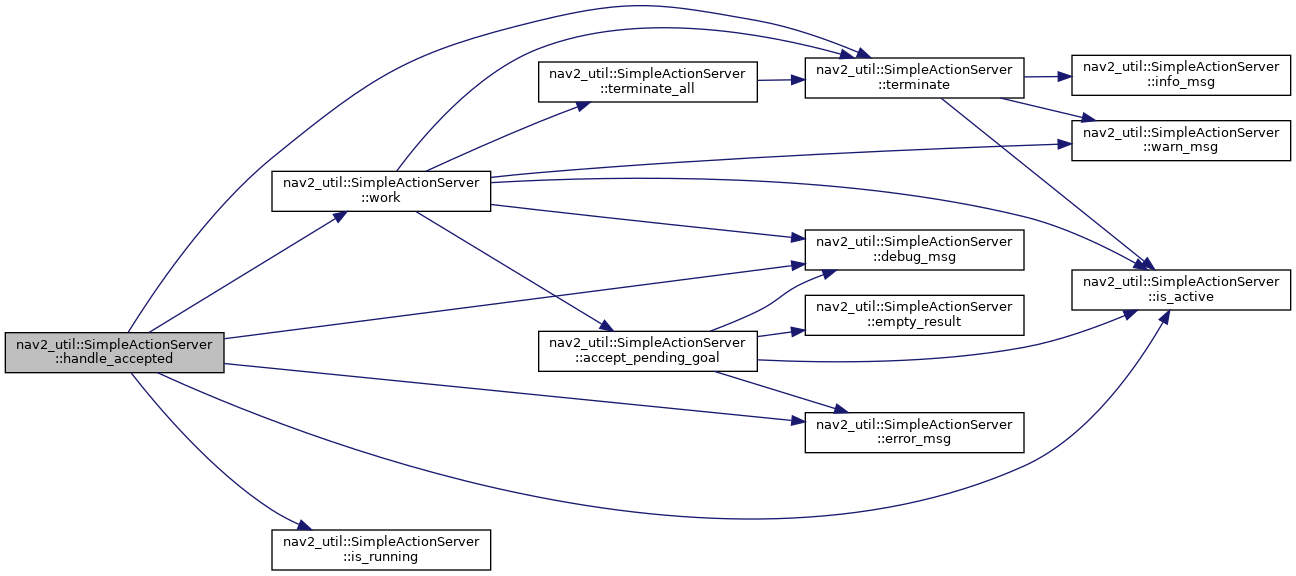
◆ handle_accepted()
|
inline |
Handles accepted goals and adds to preempted queue to switch to.
- Parameters
-
Goal A server goal handle to cancel
Definition at line 177 of file simple_action_server.hpp.
References nav2_util::SimpleActionServer< ActionT >::debug_msg(), nav2_util::SimpleActionServer< ActionT >::error_msg(), nav2_util::SimpleActionServer< ActionT >::is_active(), nav2_util::SimpleActionServer< ActionT >::is_running(), nav2_util::SimpleActionServer< ActionT >::terminate(), and nav2_util::SimpleActionServer< ActionT >::work().
Referenced by nav2_util::SimpleActionServer< ActionT >::SimpleActionServer().

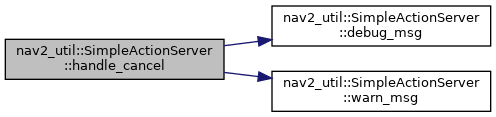
◆ handle_cancel()
|
inline |
Accepts cancellation requests of action server.
- Parameters
-
uuid Goal ID Goal A server goal handle to cancel
- Returns
- CancelResponse response of the goal cancelled
Definition at line 157 of file simple_action_server.hpp.
References nav2_util::SimpleActionServer< ActionT >::debug_msg(), and nav2_util::SimpleActionServer< ActionT >::warn_msg().
Referenced by nav2_util::SimpleActionServer< ActionT >::SimpleActionServer().

◆ handle_goal()
|
inline |
handle the goal requested: accept or reject. This implementation always accepts.
- Parameters
-
uuid Goal ID Goal A shared pointer to the specific goal
- Returns
- GoalResponse response of the goal processed
Definition at line 137 of file simple_action_server.hpp.
References nav2_util::SimpleActionServer< ActionT >::debug_msg().
Referenced by nav2_util::SimpleActionServer< ActionT >::SimpleActionServer().


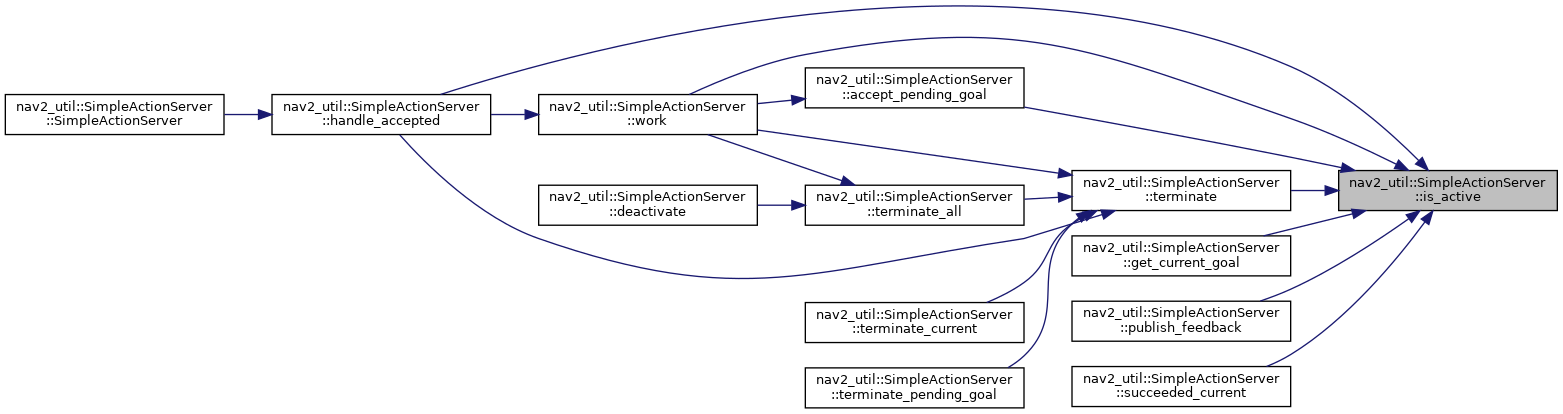
◆ is_active()
|
inlineconstexprprotected |
Whether a given goal handle is currently active.
- Parameters
-
handle Goal handle to check
- Returns
- Whether this goal handle is active
Definition at line 540 of file simple_action_server.hpp.
Referenced by nav2_util::SimpleActionServer< ActionT >::accept_pending_goal(), nav2_util::SimpleActionServer< ActionT >::get_current_goal(), nav2_util::SimpleActionServer< ActionT >::handle_accepted(), nav2_util::SimpleActionServer< ActionT >::publish_feedback(), nav2_util::SimpleActionServer< ActionT >::succeeded_current(), nav2_util::SimpleActionServer< ActionT >::terminate(), and nav2_util::SimpleActionServer< ActionT >::work().
◆ is_cancel_requested()
|
inline |
Whether or not a cancel command has come in.
- Returns
- bool Whether a cancel command has been requested or not
Definition at line 425 of file simple_action_server.hpp.
References nav2_util::SimpleActionServer< ActionT >::error_msg().

◆ is_preempt_requested()
|
inline |
Whether the action server has been asked to be preempted with a new goal.
- Returns
- bool If there's a preemption request or not
Definition at line 326 of file simple_action_server.hpp.
◆ is_running()
|
inline |
Whether the action server is munching on a goal.
- Returns
- bool If its running or not
Definition at line 305 of file simple_action_server.hpp.
Referenced by nav2_util::SimpleActionServer< ActionT >::deactivate(), and nav2_util::SimpleActionServer< ActionT >::handle_accepted().

◆ is_server_active()
|
inline |
Whether the action server is active or not.
- Returns
- bool If its active or not
Definition at line 316 of file simple_action_server.hpp.
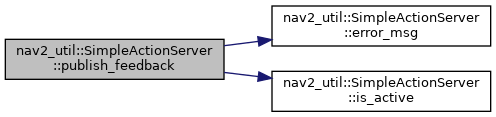
◆ publish_feedback()
|
inline |
Publish feedback to the action server clients.
- Parameters
-
feedback A feedback object to send to the clients
Definition at line 490 of file simple_action_server.hpp.
References nav2_util::SimpleActionServer< ActionT >::error_msg(), and nav2_util::SimpleActionServer< ActionT >::is_active().
◆ succeeded_current()
|
inline |
Return success of the active action.
- Parameters
-
result A result object to send to the terminated actions
Definition at line 473 of file simple_action_server.hpp.
References nav2_util::SimpleActionServer< ActionT >::debug_msg(), and nav2_util::SimpleActionServer< ActionT >::is_active().
◆ terminate()
|
inlineprotected |
Terminate a particular action with a result.
- Parameters
-
handle goal handle to terminate the Results object to terminate the action with
Definition at line 551 of file simple_action_server.hpp.
References nav2_util::SimpleActionServer< ActionT >::info_msg(), nav2_util::SimpleActionServer< ActionT >::is_active(), and nav2_util::SimpleActionServer< ActionT >::warn_msg().
Referenced by nav2_util::SimpleActionServer< ActionT >::handle_accepted(), nav2_util::SimpleActionServer< ActionT >::terminate_all(), nav2_util::SimpleActionServer< ActionT >::terminate_current(), nav2_util::SimpleActionServer< ActionT >::terminate_pending_goal(), and nav2_util::SimpleActionServer< ActionT >::work().
◆ terminate_all()
|
inline |
Terminate all pending and active actions.
- Parameters
-
result A result object to send to the terminated actions
Definition at line 447 of file simple_action_server.hpp.
References nav2_util::SimpleActionServer< ActionT >::terminate().
Referenced by nav2_util::SimpleActionServer< ActionT >::deactivate(), and nav2_util::SimpleActionServer< ActionT >::work().

◆ terminate_current()
|
inline |
Terminate the active action.
- Parameters
-
result A result object to send to the terminated action
Definition at line 461 of file simple_action_server.hpp.
References nav2_util::SimpleActionServer< ActionT >::terminate().
The documentation for this class was generated from the following file:
- nav2_util/include/nav2_util/simple_action_server.hpp