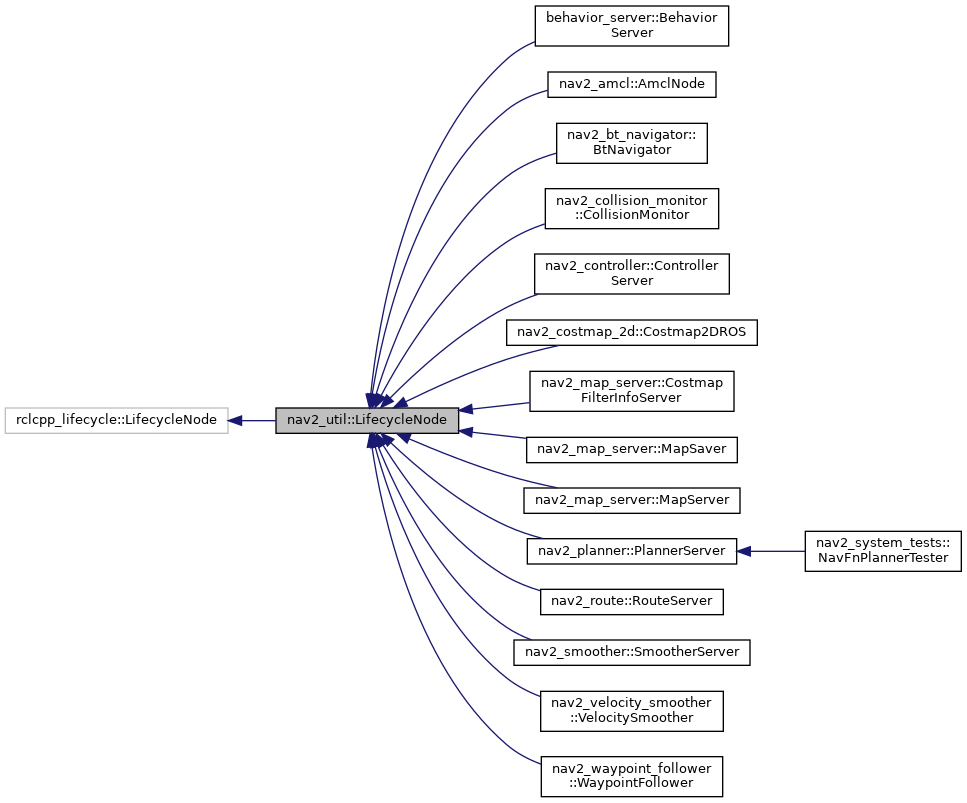
A lifecycle node wrapper to enable common Nav2 needs such as manipulating parameters. More...
#include <nav2_util/include/nav2_util/lifecycle_node.hpp>
Classes | |
| struct | floating_point_range |
| struct | integer_range |
Public Member Functions | |
| LifecycleNode (const std::string &node_name, const std::string &ns="", const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A lifecycle node constructor. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has no integer or floating point range constraints. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const floating_point_range fp_range, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has a floating point range constraint. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const integer_range int_range, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has an integer range constraint. More... | |
| std::shared_ptr< nav2_util::LifecycleNode > | shared_from_this () |
| Get a shared pointer of this. | |
| nav2_util::CallbackReturn | on_error (const rclcpp_lifecycle::State &) |
| Abstracted on_error state transition callback, since unimplemented as of 2020 in the managed ROS2 node state machine. More... | |
| virtual void | on_rcl_preshutdown () |
| Perform preshutdown activities before our Context is shutdown. Note that this is related to our Context's shutdown sequence, not the lifecycle node state machine. | |
| void | createBond () |
| Create bond connection to lifecycle manager. | |
| void | destroyBond () |
| Destroy bond connection to lifecycle manager. | |
Protected Member Functions | |
| void | printLifecycleNodeNotification () |
| Print notifications for lifecycle node. | |
| void | register_rcl_preshutdown_callback () |
| void | runCleanups () |
Protected Attributes | |
| std::unique_ptr< rclcpp::PreShutdownCallbackHandle > | rcl_preshutdown_cb_handle_ {nullptr} |
| std::unique_ptr< bond::Bond > | bond_ {nullptr} |
Detailed Description
A lifecycle node wrapper to enable common Nav2 needs such as manipulating parameters.
Definition at line 37 of file lifecycle_node.hpp.
Constructor & Destructor Documentation
◆ LifecycleNode()
| nav2_util::LifecycleNode::LifecycleNode | ( | const std::string & | node_name, |
| const std::string & | ns = "", |
||
| const rclcpp::NodeOptions & | options = rclcpp::NodeOptions() |
||
| ) |
A lifecycle node constructor.
- Parameters
-
node_name Name for the node namespace Namespace for the node, if any options Node options
Definition at line 26 of file lifecycle_node.cpp.
References printLifecycleNodeNotification(), and register_rcl_preshutdown_callback().

Member Function Documentation
◆ add_parameter() [1/3]
|
inline |
Declare a parameter that has a floating point range constraint.
- Parameters
-
node_name Name of parameter default_value Default node value to add fp_range floating point range description Node description additional_constraints Any additional constraints on the parameters to list read_only Whether this param should be considered read only
Definition at line 98 of file lifecycle_node.hpp.
◆ add_parameter() [2/3]
|
inline |
Declare a parameter that has an integer range constraint.
- Parameters
-
node_name Name of parameter default_value Default node value to add integer_range Integer range description Node description additional_constraints Any additional constraints on the parameters to list read_only Whether this param should be considered read only
Definition at line 127 of file lifecycle_node.hpp.
◆ add_parameter() [3/3]
|
inline |
Declare a parameter that has no integer or floating point range constraints.
- Parameters
-
node_name Name of parameter default_value Default node value to add description Node description additional_constraints Any additional constraints on the parameters to list read_only Whether this param should be considered read only
Definition at line 74 of file lifecycle_node.hpp.
◆ on_error()
|
inline |
Abstracted on_error state transition callback, since unimplemented as of 2020 in the managed ROS2 node state machine.
- Parameters
-
state State prior to error transition
- Returns
- Return type for success or failed transition to error state
Definition at line 162 of file lifecycle_node.hpp.
◆ register_rcl_preshutdown_callback()
|
protected |
Register our preshutdown callback for this Node's rcl Context. The callback fires before this Node's Context is shutdown. Note this is not directly related to the lifecycle state machine.
Definition at line 101 of file lifecycle_node.cpp.
References on_rcl_preshutdown().
Referenced by LifecycleNode().


◆ runCleanups()
|
protected |
Run some common cleanup steps shared between rcl preshutdown and destruction.
Definition at line 70 of file lifecycle_node.cpp.
Referenced by on_rcl_preshutdown(), and nav2_costmap_2d::Costmap2DROS::on_rcl_preshutdown().

The documentation for this class was generated from the following files:
- nav2_util/include/nav2_util/lifecycle_node.hpp
- nav2_util/src/lifecycle_node.cpp