A 2D costmap provides a mapping between points in the world and their associated "costs". More...
#include <nav2_costmap_2d/include/nav2_costmap_2d/costmap_2d.hpp>

Classes | |
| class | MarkCell |
| class | PolygonOutlineCells |
Public Types | |
| typedef std::recursive_mutex | mutex_t |
Public Member Functions | |
| Costmap2D (unsigned int cells_size_x, unsigned int cells_size_y, double resolution, double origin_x, double origin_y, unsigned char default_value=0) | |
| Constructor for a costmap. More... | |
| Costmap2D (const Costmap2D &map) | |
| Copy constructor for a costmap, creates a copy efficiently. More... | |
| Costmap2D (const nav_msgs::msg::OccupancyGrid &map) | |
| Constructor for a costmap from an OccupancyGrid map. More... | |
| Costmap2D & | operator= (const Costmap2D &map) |
| Overloaded assignment operator. More... | |
| bool | copyCostmapWindow (const Costmap2D &map, double win_origin_x, double win_origin_y, double win_size_x, double win_size_y) |
| Turn this costmap into a copy of a window of a costmap passed in. More... | |
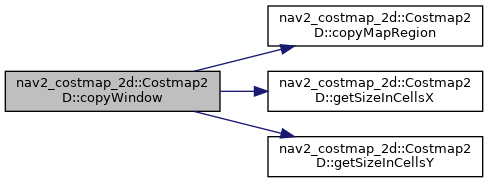
| bool | copyWindow (const Costmap2D &source, unsigned int sx0, unsigned int sy0, unsigned int sxn, unsigned int syn, unsigned int dx0, unsigned int dy0) |
| Copies the (x0,y0)..(xn,yn) window from source costmap into a current costmap. More... | |
| Costmap2D () | |
| Default constructor. | |
| virtual | ~Costmap2D () |
| Destructor. | |
| unsigned char | getCost (unsigned int mx, unsigned int my) const |
| Get the cost of a cell in the costmap. More... | |
| unsigned char | getCost (unsigned int index) const |
| Get the cost of a cell in the costmap. More... | |
| void | setCost (unsigned int mx, unsigned int my, unsigned char cost) |
| Set the cost of a cell in the costmap. More... | |
| void | mapToWorld (unsigned int mx, unsigned int my, double &wx, double &wy) const |
| Convert from map coordinates to world coordinates. More... | |
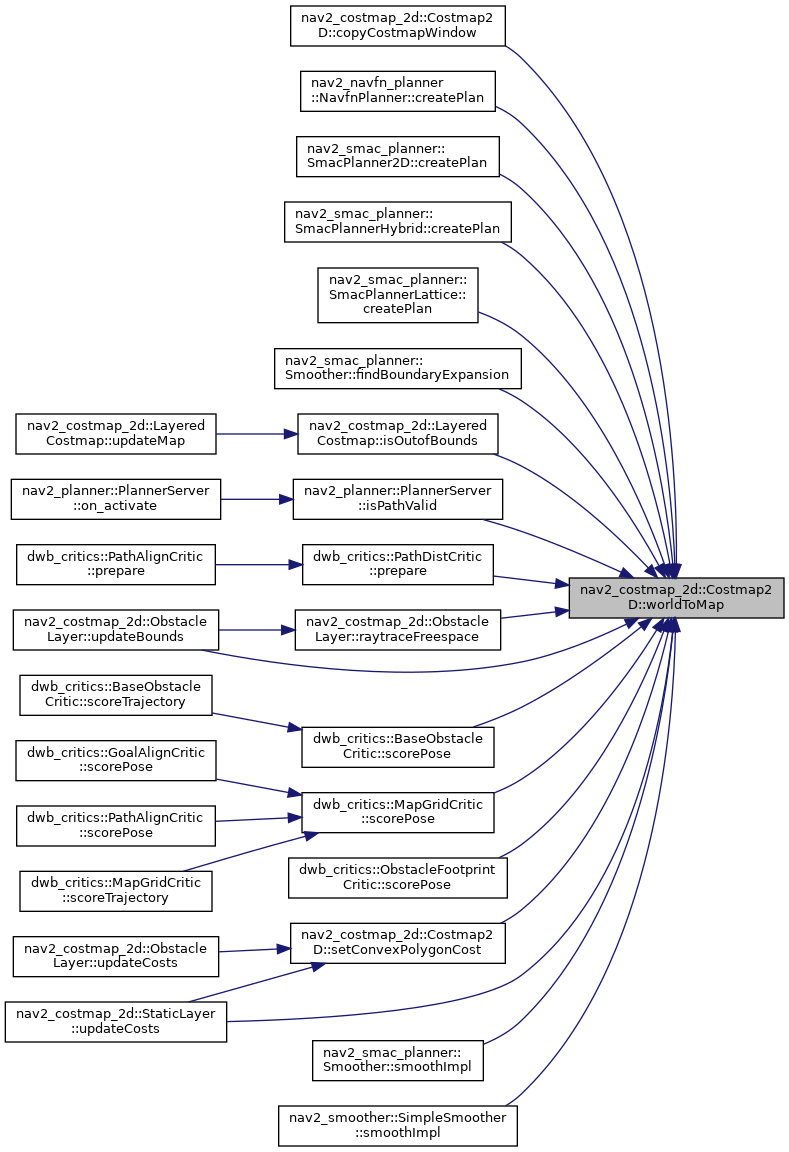
| bool | worldToMap (double wx, double wy, unsigned int &mx, unsigned int &my) const |
| Convert from world coordinates to map coordinates. More... | |
| void | worldToMapNoBounds (double wx, double wy, int &mx, int &my) const |
| Convert from world coordinates to map coordinates without checking for legal bounds. More... | |
| void | worldToMapEnforceBounds (double wx, double wy, int &mx, int &my) const |
| Convert from world coordinates to map coordinates, constraining results to legal bounds. More... | |
| unsigned int | getIndex (unsigned int mx, unsigned int my) const |
| Given two map coordinates... compute the associated index. More... | |
| void | indexToCells (unsigned int index, unsigned int &mx, unsigned int &my) const |
| Given an index... compute the associated map coordinates. More... | |
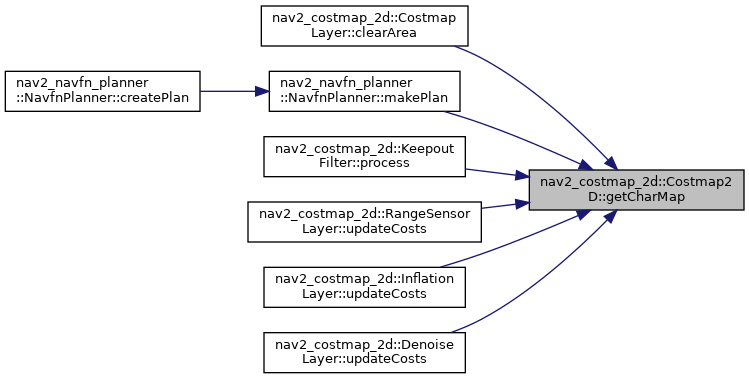
| unsigned char * | getCharMap () const |
| Will return a pointer to the underlying unsigned char array used as the costmap. More... | |
| unsigned int | getSizeInCellsX () const |
| Accessor for the x size of the costmap in cells. More... | |
| unsigned int | getSizeInCellsY () const |
| Accessor for the y size of the costmap in cells. More... | |
| double | getSizeInMetersX () const |
| Accessor for the x size of the costmap in meters. More... | |
| double | getSizeInMetersY () const |
| Accessor for the y size of the costmap in meters. More... | |
| double | getOriginX () const |
| Accessor for the x origin of the costmap. More... | |
| double | getOriginY () const |
| Accessor for the y origin of the costmap. More... | |
| double | getResolution () const |
| Accessor for the resolution of the costmap. More... | |
| void | setDefaultValue (unsigned char c) |
| Set the default background value of the costmap. More... | |
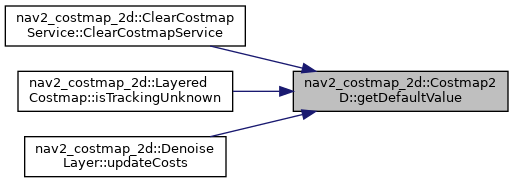
| unsigned char | getDefaultValue () |
| Get the default background value of the costmap. More... | |
| bool | setConvexPolygonCost (const std::vector< geometry_msgs::msg::Point > &polygon, unsigned char cost_value) |
| Sets the cost of a convex polygon to a desired value. More... | |
| void | polygonOutlineCells (const std::vector< MapLocation > &polygon, std::vector< MapLocation > &polygon_cells) |
| Get the map cells that make up the outline of a polygon. More... | |
| void | convexFillCells (const std::vector< MapLocation > &polygon, std::vector< MapLocation > &polygon_cells) |
| Get the map cells that fill a convex polygon. More... | |
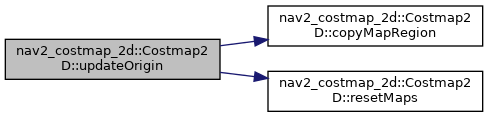
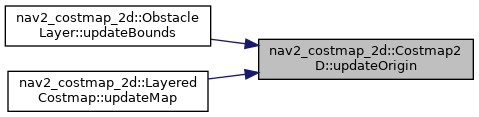
| virtual void | updateOrigin (double new_origin_x, double new_origin_y) |
| Move the origin of the costmap to a new location.... keeping data when it can. More... | |
| bool | saveMap (std::string file_name) |
| Save the costmap out to a pgm file. More... | |
| void | resizeMap (unsigned int size_x, unsigned int size_y, double resolution, double origin_x, double origin_y) |
| Resize the costmap. | |
| void | resetMap (unsigned int x0, unsigned int y0, unsigned int xn, unsigned int yn) |
| Reset the costmap in bounds. | |
| void | resetMapToValue (unsigned int x0, unsigned int y0, unsigned int xn, unsigned int yn, unsigned char value) |
| Reset the costmap in bounds to a value. | |
| unsigned int | cellDistance (double world_dist) |
| Given distance in the world... convert it to cells. More... | |
| mutex_t * | getMutex () |
Protected Member Functions | |
| template<typename data_type > | |
| void | copyMapRegion (data_type *source_map, unsigned int sm_lower_left_x, unsigned int sm_lower_left_y, unsigned int sm_size_x, data_type *dest_map, unsigned int dm_lower_left_x, unsigned int dm_lower_left_y, unsigned int dm_size_x, unsigned int region_size_x, unsigned int region_size_y) |
| Copy a region of a source map into a destination map. More... | |
| virtual void | deleteMaps () |
| Deletes the costmap, static_map, and markers data structures. | |
| virtual void | resetMaps () |
| Resets the costmap and static_map to be unknown space. | |
| virtual void | initMaps (unsigned int size_x, unsigned int size_y) |
| Initializes the costmap, static_map, and markers data structures. More... | |
| template<class ActionType > | |
| void | raytraceLine (ActionType at, unsigned int x0, unsigned int y0, unsigned int x1, unsigned int y1, unsigned int max_length=UINT_MAX, unsigned int min_length=0) |
| Raytrace a line and apply some action at each step. More... | |
Protected Attributes | |
| unsigned int | size_x_ |
| unsigned int | size_y_ |
| double | resolution_ |
| double | origin_x_ |
| double | origin_y_ |
| unsigned char * | costmap_ |
| unsigned char | default_value_ |
Friends | |
| class | CostmapTester |
Detailed Description
A 2D costmap provides a mapping between points in the world and their associated "costs".
Definition at line 67 of file costmap_2d.hpp.
Constructor & Destructor Documentation
◆ Costmap2D() [1/3]
| nav2_costmap_2d::Costmap2D::Costmap2D | ( | unsigned int | cells_size_x, |
| unsigned int | cells_size_y, | ||
| double | resolution, | ||
| double | origin_x, | ||
| double | origin_y, | ||
| unsigned char | default_value = 0 |
||
| ) |
Constructor for a costmap.
- Parameters
-
cells_size_x The x size of the map in cells cells_size_y The y size of the map in cells resolution The resolution of the map in meters/cell origin_x The x origin of the map origin_y The y origin of the map default_value Default Value
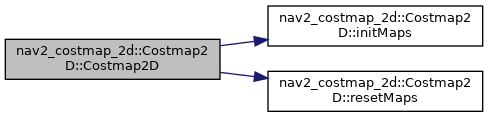
Definition at line 49 of file costmap_2d.cpp.
References initMaps(), and resetMaps().
◆ Costmap2D() [2/3]
| nav2_costmap_2d::Costmap2D::Costmap2D | ( | const Costmap2D & | map | ) |
Copy constructor for a costmap, creates a copy efficiently.
- Parameters
-
map The costmap to copy
Definition at line 235 of file costmap_2d.cpp.
◆ Costmap2D() [3/3]
|
explicit |
Constructor for a costmap from an OccupancyGrid map.
- Parameters
-
map The OccupancyGrid map to create costmap from
Definition at line 62 of file costmap_2d.cpp.
Member Function Documentation
◆ cellDistance()
| unsigned int nav2_costmap_2d::Costmap2D::cellDistance | ( | double | world_dist | ) |
Given distance in the world... convert it to cells.
- Parameters
-
world_dist The world distance
- Returns
- The equivalent cell distance
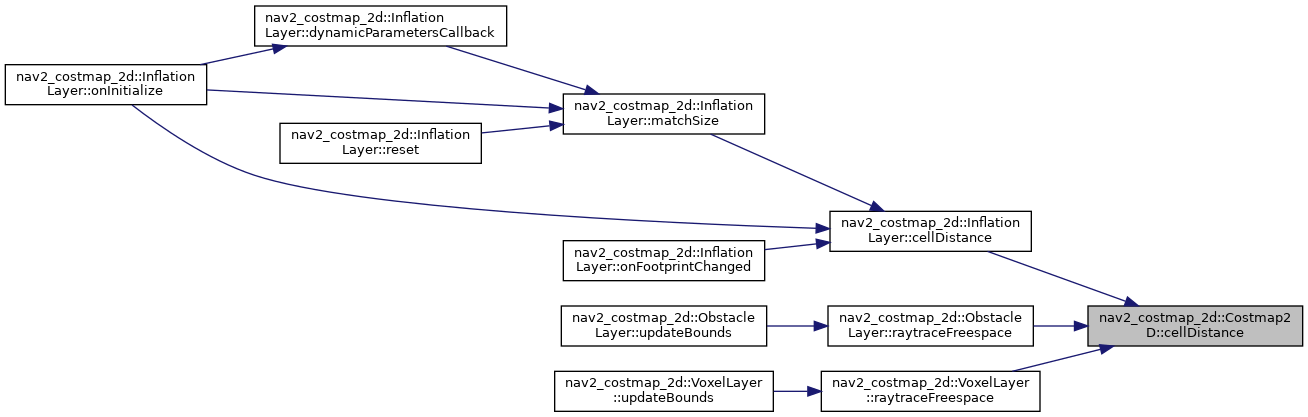
Definition at line 255 of file costmap_2d.cpp.
Referenced by nav2_costmap_2d::InflationLayer::cellDistance(), nav2_costmap_2d::ObstacleLayer::raytraceFreespace(), and nav2_costmap_2d::VoxelLayer::raytraceFreespace().
◆ convexFillCells()
| void nav2_costmap_2d::Costmap2D::convexFillCells | ( | const std::vector< MapLocation > & | polygon, |
| std::vector< MapLocation > & | polygon_cells | ||
| ) |
Get the map cells that fill a convex polygon.
- Parameters
-
polygon The polygon in map coordinates to rasterize polygon_cells Will be set to the cells that fill the polygon
Definition at line 432 of file costmap_2d.cpp.
References polygonOutlineCells().
Referenced by setConvexPolygonCost().


◆ copyCostmapWindow()
| bool nav2_costmap_2d::Costmap2D::copyCostmapWindow | ( | const Costmap2D & | map, |
| double | win_origin_x, | ||
| double | win_origin_y, | ||
| double | win_size_x, | ||
| double | win_size_y | ||
| ) |
Turn this costmap into a copy of a window of a costmap passed in.
- Parameters
-
map The costmap to copy win_origin_x The x origin (lower left corner) for the window to copy, in meters win_origin_y The y origin (lower left corner) for the window to copy, in meters win_size_x The x size of the window, in meters win_size_y The y size of the window, in meters
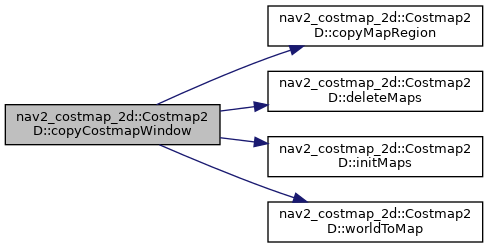
Definition at line 145 of file costmap_2d.cpp.
References copyMapRegion(), deleteMaps(), initMaps(), and worldToMap().
◆ copyMapRegion()
|
inlineprotected |
Copy a region of a source map into a destination map.
- Parameters
-
source_map The source map sm_lower_left_x The lower left x point of the source map to start the copy sm_lower_left_y The lower left y point of the source map to start the copy sm_size_x The x size of the source map dest_map The destination map dm_lower_left_x The lower left x point of the destination map to start the copy dm_lower_left_y The lower left y point of the destination map to start the copy dm_size_x The x size of the destination map region_size_x The x size of the region to copy region_size_y The y size of the region to copy
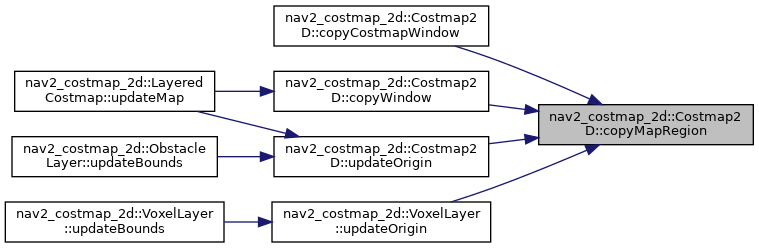
Definition at line 382 of file costmap_2d.hpp.
Referenced by copyCostmapWindow(), copyWindow(), updateOrigin(), and nav2_costmap_2d::VoxelLayer::updateOrigin().
◆ copyWindow()
| bool nav2_costmap_2d::Costmap2D::copyWindow | ( | const Costmap2D & | source, |
| unsigned int | sx0, | ||
| unsigned int | sy0, | ||
| unsigned int | sxn, | ||
| unsigned int | syn, | ||
| unsigned int | dx0, | ||
| unsigned int | dy0 | ||
| ) |
Copies the (x0,y0)..(xn,yn) window from source costmap into a current costmap.
- Parameters
-
source Source costmap where the window will be copied from sx0 Lower x-boundary of the source window to copy, in cells sy0 Lower y-boundary of the source window to copy, in cells sxn Upper x-boundary of the source window to copy, in cells syn Upper y-boundary of the source window to copy, in cells dx0 Lower x-boundary of the destination window to copy, in cells dx0 Lower y-boundary of the destination window to copy, in cells
- Returns
- true if copy was succeeded or false in negative case
Definition at line 187 of file costmap_2d.cpp.
References copyMapRegion(), getSizeInCellsX(), and getSizeInCellsY().
Referenced by nav2_costmap_2d::LayeredCostmap::updateMap().

◆ getCharMap()
| unsigned char * nav2_costmap_2d::Costmap2D::getCharMap | ( | ) | const |
Will return a pointer to the underlying unsigned char array used as the costmap.
- Returns
- A pointer to the underlying unsigned char array storing cost values
Definition at line 261 of file costmap_2d.cpp.
Referenced by nav2_costmap_2d::CostmapLayer::clearArea(), nav2_navfn_planner::NavfnPlanner::makePlan(), nav2_costmap_2d::KeepoutFilter::process(), nav2_costmap_2d::RangeSensorLayer::updateCosts(), nav2_costmap_2d::InflationLayer::updateCosts(), and nav2_costmap_2d::DenoiseLayer::updateCosts().
◆ getCost() [1/2]
| unsigned char nav2_costmap_2d::Costmap2D::getCost | ( | unsigned int | index | ) | const |
Get the cost of a cell in the costmap.
- Parameters
-
index The cell index
- Returns
- The cost of the cell
Definition at line 271 of file costmap_2d.cpp.
◆ getCost() [2/2]
| unsigned char nav2_costmap_2d::Costmap2D::getCost | ( | unsigned int | mx, |
| unsigned int | my | ||
| ) | const |
Get the cost of a cell in the costmap.
- Parameters
-
mx The x coordinate of the cell my The y coordinate of the cell
- Returns
- The cost of the cell
Definition at line 266 of file costmap_2d.cpp.
References getIndex().
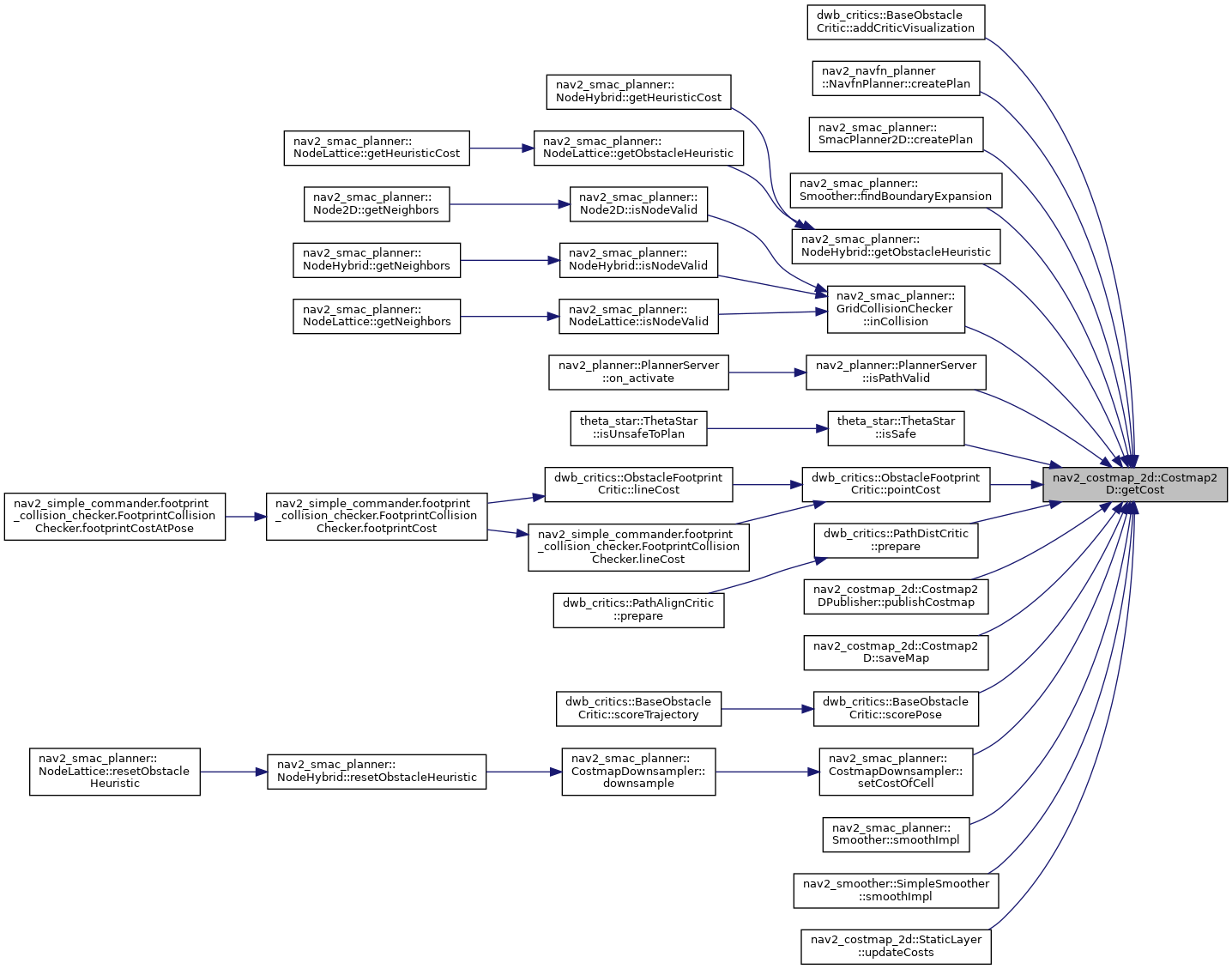
Referenced by dwb_critics::BaseObstacleCritic::addCriticVisualization(), nav2_navfn_planner::NavfnPlanner::createPlan(), nav2_smac_planner::SmacPlanner2D::createPlan(), nav2_smac_planner::Smoother::findBoundaryExpansion(), nav2_smac_planner::NodeHybrid::getObstacleHeuristic(), nav2_smac_planner::GridCollisionChecker::inCollision(), nav2_planner::PlannerServer::isPathValid(), theta_star::ThetaStar::isSafe(), dwb_critics::ObstacleFootprintCritic::pointCost(), dwb_critics::PathDistCritic::prepare(), nav2_costmap_2d::Costmap2DPublisher::publishCostmap(), saveMap(), dwb_critics::BaseObstacleCritic::scorePose(), nav2_smac_planner::CostmapDownsampler::setCostOfCell(), nav2_smac_planner::Smoother::smoothImpl(), nav2_smoother::SimpleSmoother::smoothImpl(), and nav2_costmap_2d::StaticLayer::updateCosts().

◆ getDefaultValue()
|
inline |
Get the default background value of the costmap.
- Returns
- default value
Definition at line 289 of file costmap_2d.hpp.
Referenced by nav2_costmap_2d::ClearCostmapService::ClearCostmapService(), nav2_costmap_2d::LayeredCostmap::isTrackingUnknown(), and nav2_costmap_2d::DenoiseLayer::updateCosts().
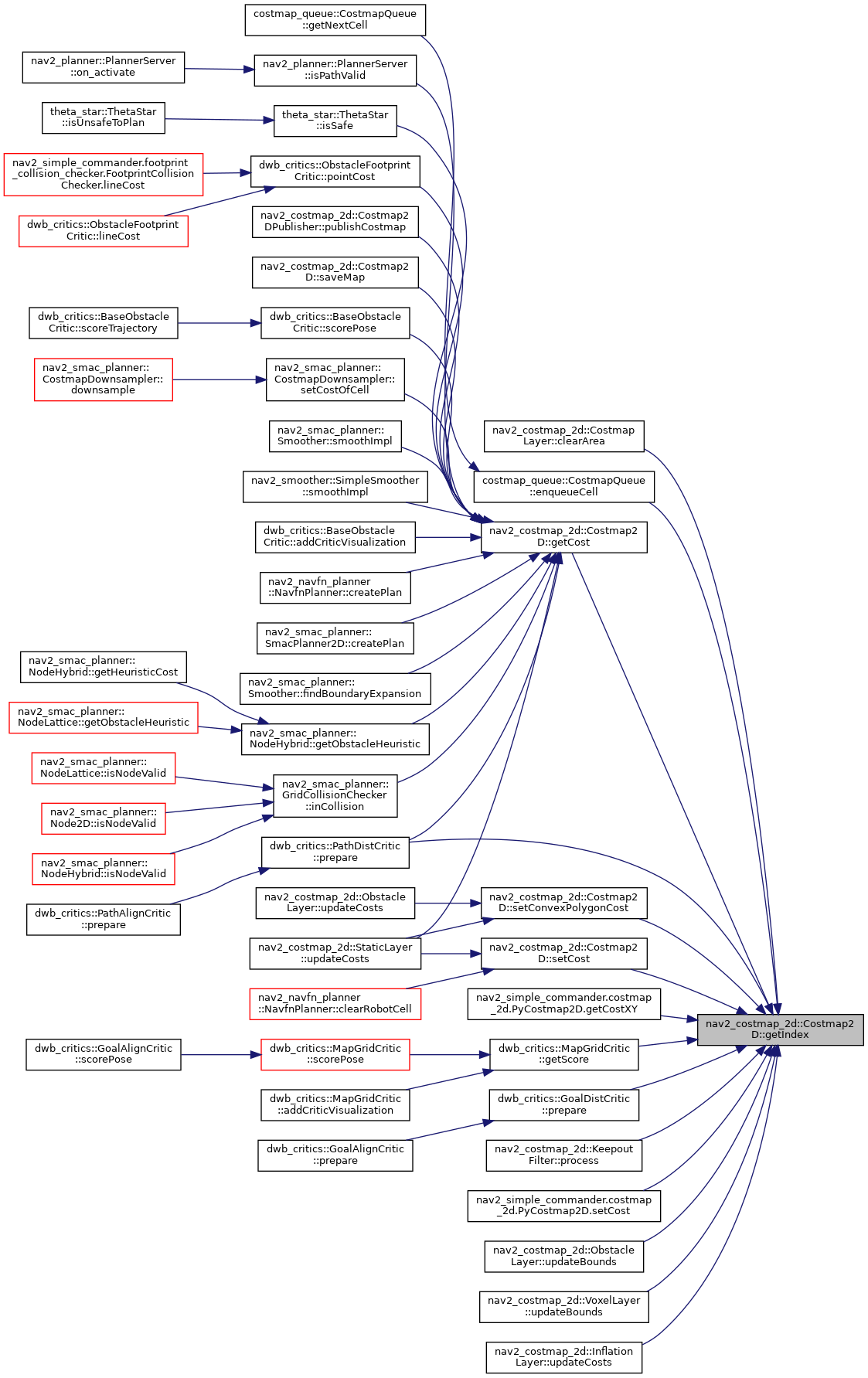
◆ getIndex()
|
inline |
Given two map coordinates... compute the associated index.
- Parameters
-
mx The x coordinate my The y coordinate
- Returns
- The associated index
Definition at line 211 of file costmap_2d.hpp.
Referenced by nav2_costmap_2d::CostmapLayer::clearArea(), costmap_queue::CostmapQueue::enqueueCell(), getCost(), nav2_simple_commander.costmap_2d.PyCostmap2D::getCostXY(), dwb_critics::MapGridCritic::getScore(), dwb_critics::GoalDistCritic::prepare(), dwb_critics::PathDistCritic::prepare(), nav2_costmap_2d::KeepoutFilter::process(), setConvexPolygonCost(), nav2_simple_commander.costmap_2d.PyCostmap2D::setCost(), setCost(), nav2_costmap_2d::ObstacleLayer::updateBounds(), nav2_costmap_2d::VoxelLayer::updateBounds(), and nav2_costmap_2d::InflationLayer::updateCosts().
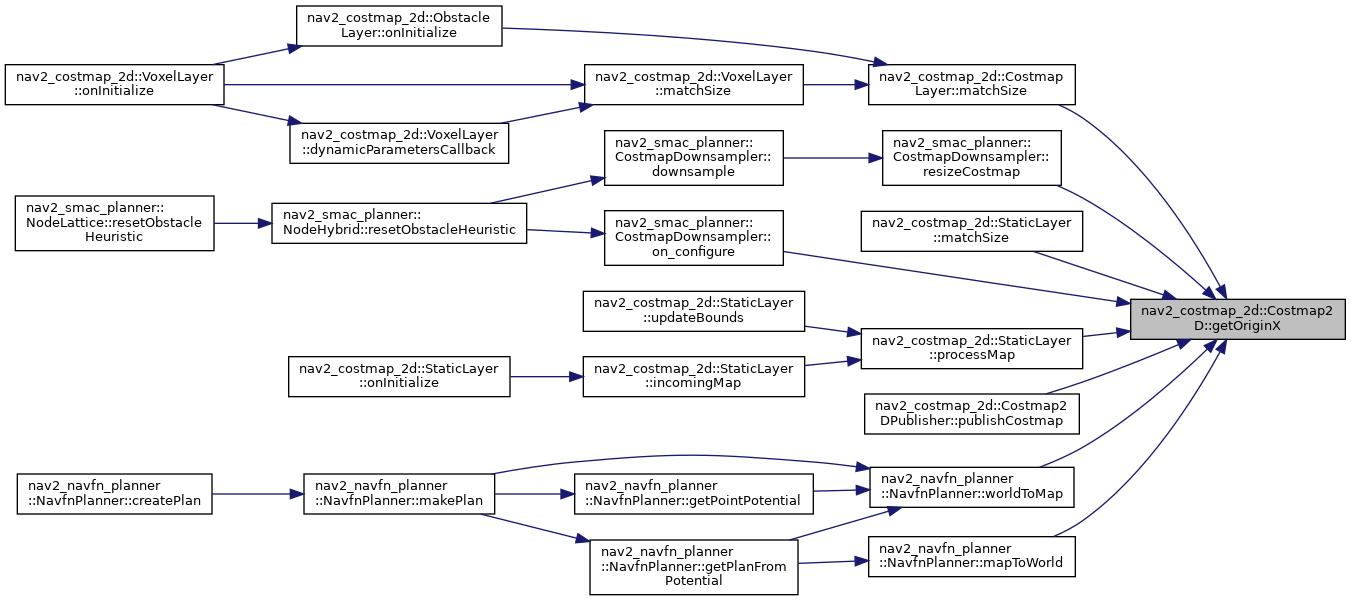
◆ getOriginX()
| double nav2_costmap_2d::Costmap2D::getOriginX | ( | ) | const |
Accessor for the x origin of the costmap.
- Returns
- The x origin of the costmap
Definition at line 521 of file costmap_2d.cpp.
Referenced by nav2_navfn_planner::NavfnPlanner::mapToWorld(), nav2_costmap_2d::CostmapLayer::matchSize(), nav2_costmap_2d::StaticLayer::matchSize(), nav2_smac_planner::CostmapDownsampler::on_configure(), nav2_costmap_2d::StaticLayer::processMap(), nav2_costmap_2d::Costmap2DPublisher::publishCostmap(), nav2_smac_planner::CostmapDownsampler::resizeCostmap(), and nav2_navfn_planner::NavfnPlanner::worldToMap().
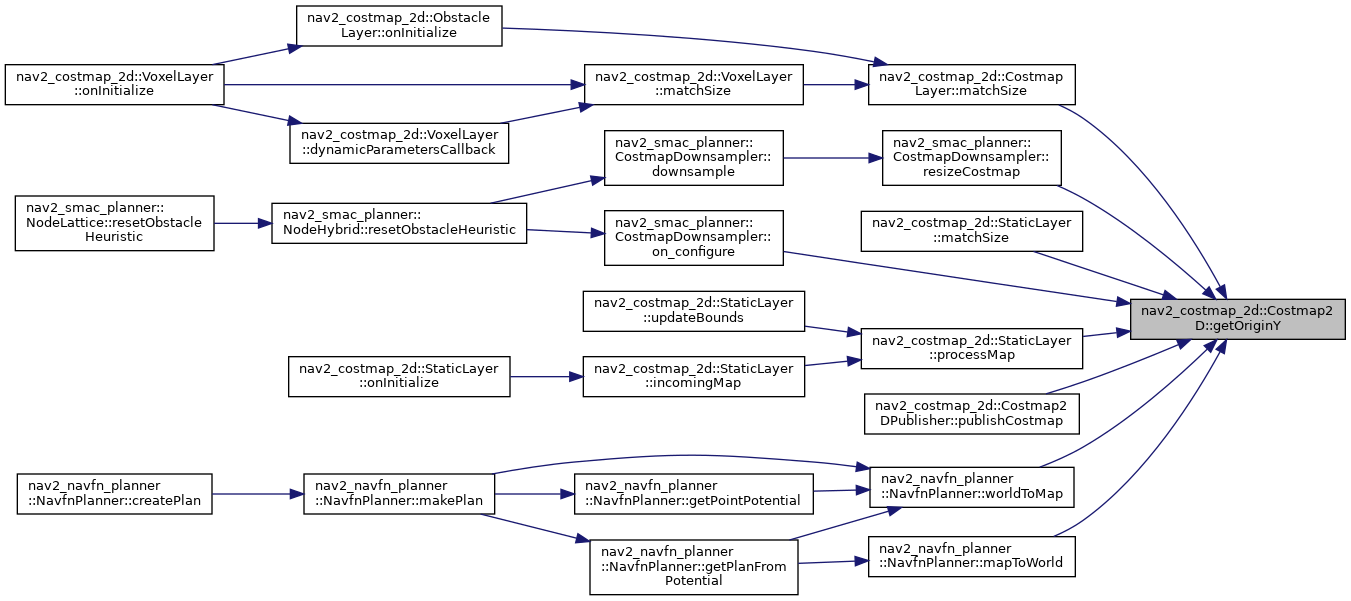
◆ getOriginY()
| double nav2_costmap_2d::Costmap2D::getOriginY | ( | ) | const |
Accessor for the y origin of the costmap.
- Returns
- The y origin of the costmap
Definition at line 526 of file costmap_2d.cpp.
Referenced by nav2_navfn_planner::NavfnPlanner::mapToWorld(), nav2_costmap_2d::CostmapLayer::matchSize(), nav2_costmap_2d::StaticLayer::matchSize(), nav2_smac_planner::CostmapDownsampler::on_configure(), nav2_costmap_2d::StaticLayer::processMap(), nav2_costmap_2d::Costmap2DPublisher::publishCostmap(), nav2_smac_planner::CostmapDownsampler::resizeCostmap(), and nav2_navfn_planner::NavfnPlanner::worldToMap().
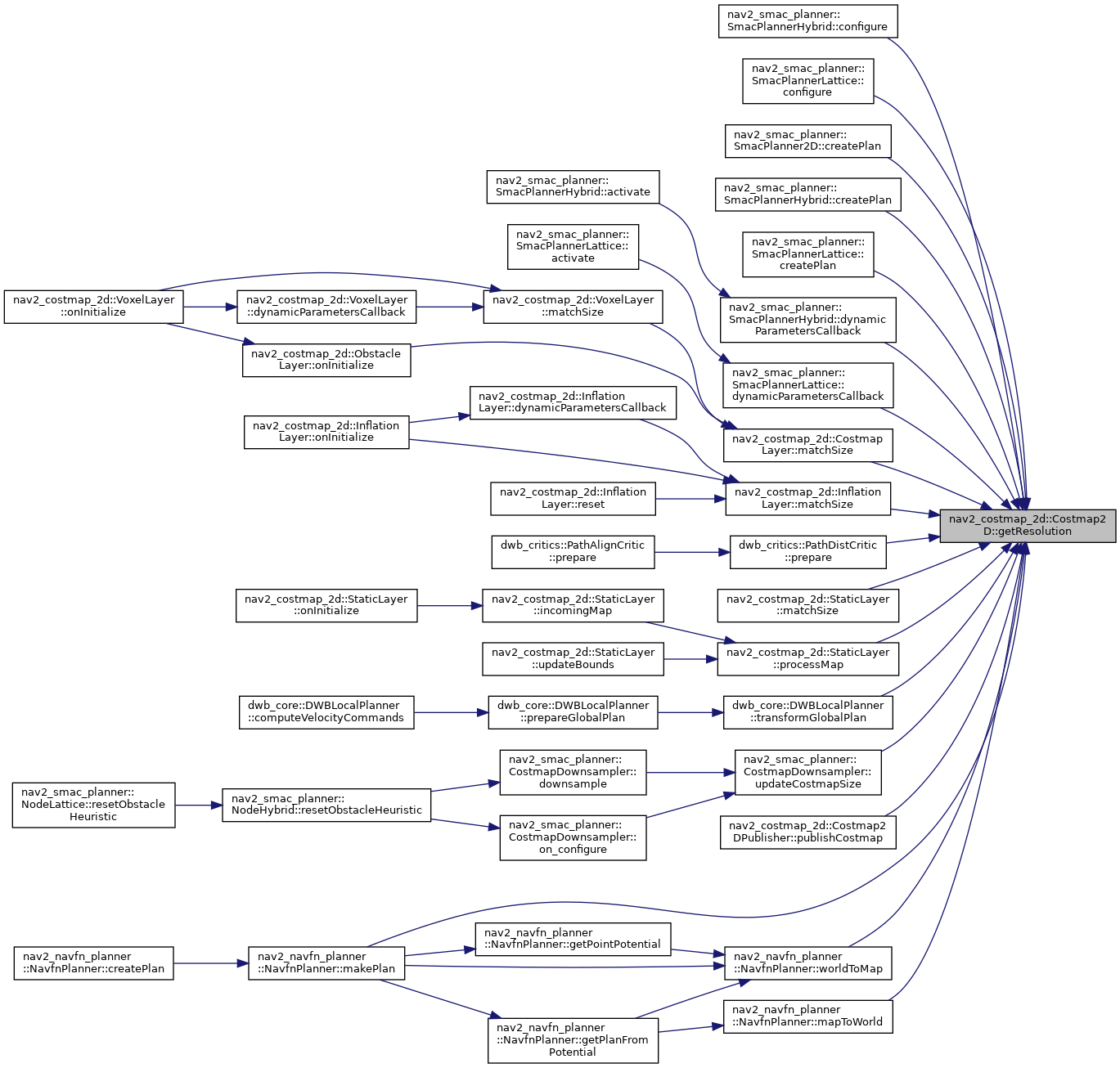
◆ getResolution()
| double nav2_costmap_2d::Costmap2D::getResolution | ( | ) | const |
Accessor for the resolution of the costmap.
- Returns
- The resolution of the costmap
Definition at line 531 of file costmap_2d.cpp.
Referenced by nav2_smac_planner::SmacPlannerHybrid::configure(), nav2_smac_planner::SmacPlannerLattice::configure(), nav2_smac_planner::SmacPlanner2D::createPlan(), nav2_smac_planner::SmacPlannerHybrid::createPlan(), nav2_smac_planner::SmacPlannerLattice::createPlan(), nav2_smac_planner::SmacPlannerHybrid::dynamicParametersCallback(), nav2_smac_planner::SmacPlannerLattice::dynamicParametersCallback(), nav2_navfn_planner::NavfnPlanner::makePlan(), nav2_navfn_planner::NavfnPlanner::mapToWorld(), nav2_costmap_2d::CostmapLayer::matchSize(), nav2_costmap_2d::StaticLayer::matchSize(), nav2_costmap_2d::InflationLayer::matchSize(), dwb_critics::PathDistCritic::prepare(), nav2_costmap_2d::StaticLayer::processMap(), nav2_costmap_2d::Costmap2DPublisher::publishCostmap(), dwb_core::DWBLocalPlanner::transformGlobalPlan(), nav2_smac_planner::CostmapDownsampler::updateCostmapSize(), and nav2_navfn_planner::NavfnPlanner::worldToMap().
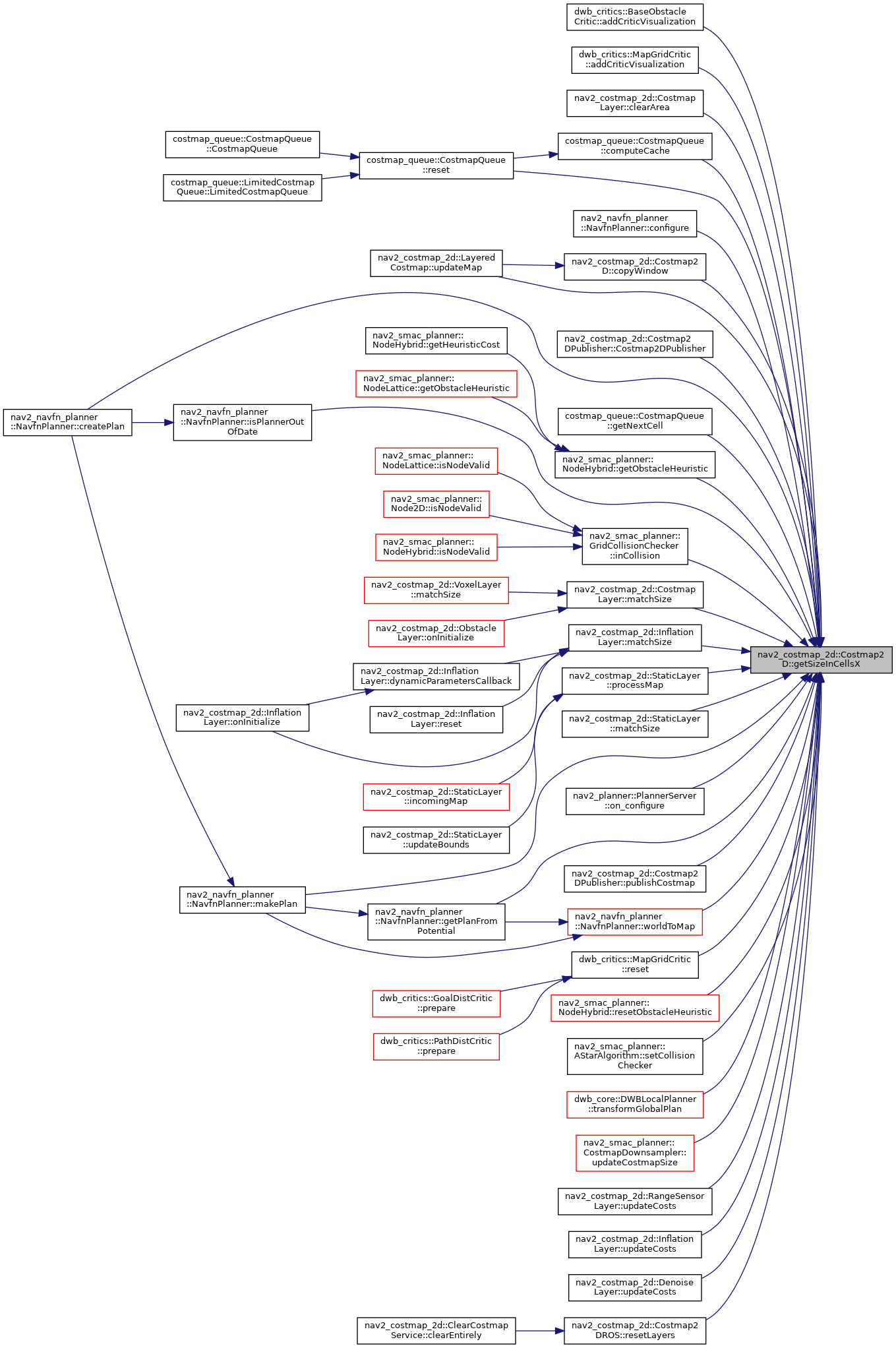
◆ getSizeInCellsX()
| unsigned int nav2_costmap_2d::Costmap2D::getSizeInCellsX | ( | ) | const |
Accessor for the x size of the costmap in cells.
- Returns
- The x size of the costmap
Definition at line 501 of file costmap_2d.cpp.
Referenced by dwb_critics::BaseObstacleCritic::addCriticVisualization(), dwb_critics::MapGridCritic::addCriticVisualization(), nav2_costmap_2d::CostmapLayer::clearArea(), costmap_queue::CostmapQueue::computeCache(), nav2_navfn_planner::NavfnPlanner::configure(), copyWindow(), nav2_costmap_2d::Costmap2DPublisher::Costmap2DPublisher(), nav2_navfn_planner::NavfnPlanner::createPlan(), costmap_queue::CostmapQueue::getNextCell(), nav2_smac_planner::NodeHybrid::getObstacleHeuristic(), nav2_navfn_planner::NavfnPlanner::getPlanFromPotential(), nav2_smac_planner::GridCollisionChecker::inCollision(), nav2_navfn_planner::NavfnPlanner::isPlannerOutOfDate(), nav2_navfn_planner::NavfnPlanner::makePlan(), nav2_costmap_2d::CostmapLayer::matchSize(), nav2_costmap_2d::StaticLayer::matchSize(), nav2_costmap_2d::InflationLayer::matchSize(), nav2_planner::PlannerServer::on_configure(), nav2_costmap_2d::StaticLayer::processMap(), nav2_costmap_2d::Costmap2DPublisher::publishCostmap(), costmap_queue::CostmapQueue::reset(), dwb_critics::MapGridCritic::reset(), nav2_costmap_2d::Costmap2DROS::resetLayers(), nav2_smac_planner::NodeHybrid::resetObstacleHeuristic(), nav2_smac_planner::AStarAlgorithm< NodeT >::setCollisionChecker(), dwb_core::DWBLocalPlanner::transformGlobalPlan(), nav2_smac_planner::CostmapDownsampler::updateCostmapSize(), nav2_costmap_2d::RangeSensorLayer::updateCosts(), nav2_costmap_2d::InflationLayer::updateCosts(), nav2_costmap_2d::DenoiseLayer::updateCosts(), nav2_costmap_2d::LayeredCostmap::updateMap(), and nav2_navfn_planner::NavfnPlanner::worldToMap().
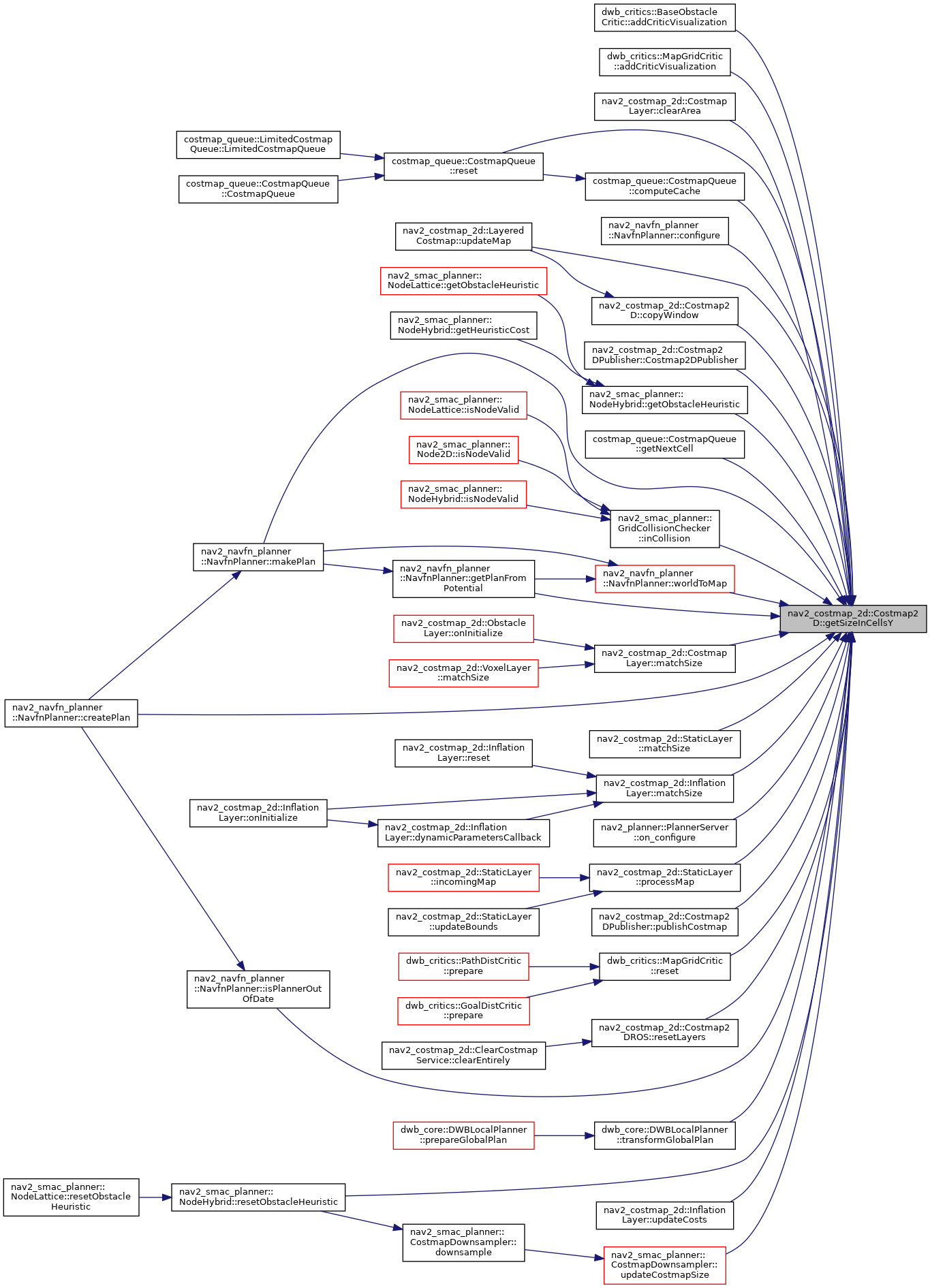
◆ getSizeInCellsY()
| unsigned int nav2_costmap_2d::Costmap2D::getSizeInCellsY | ( | ) | const |
Accessor for the y size of the costmap in cells.
- Returns
- The y size of the costmap
Definition at line 506 of file costmap_2d.cpp.
Referenced by dwb_critics::BaseObstacleCritic::addCriticVisualization(), dwb_critics::MapGridCritic::addCriticVisualization(), nav2_costmap_2d::CostmapLayer::clearArea(), costmap_queue::CostmapQueue::computeCache(), nav2_navfn_planner::NavfnPlanner::configure(), copyWindow(), nav2_costmap_2d::Costmap2DPublisher::Costmap2DPublisher(), nav2_navfn_planner::NavfnPlanner::createPlan(), costmap_queue::CostmapQueue::getNextCell(), nav2_smac_planner::NodeHybrid::getObstacleHeuristic(), nav2_navfn_planner::NavfnPlanner::getPlanFromPotential(), nav2_smac_planner::GridCollisionChecker::inCollision(), nav2_navfn_planner::NavfnPlanner::isPlannerOutOfDate(), nav2_navfn_planner::NavfnPlanner::makePlan(), nav2_costmap_2d::CostmapLayer::matchSize(), nav2_costmap_2d::StaticLayer::matchSize(), nav2_costmap_2d::InflationLayer::matchSize(), nav2_planner::PlannerServer::on_configure(), nav2_costmap_2d::StaticLayer::processMap(), nav2_costmap_2d::Costmap2DPublisher::publishCostmap(), costmap_queue::CostmapQueue::reset(), dwb_critics::MapGridCritic::reset(), nav2_costmap_2d::Costmap2DROS::resetLayers(), nav2_smac_planner::NodeHybrid::resetObstacleHeuristic(), dwb_core::DWBLocalPlanner::transformGlobalPlan(), nav2_smac_planner::CostmapDownsampler::updateCostmapSize(), nav2_costmap_2d::InflationLayer::updateCosts(), nav2_costmap_2d::LayeredCostmap::updateMap(), and nav2_navfn_planner::NavfnPlanner::worldToMap().
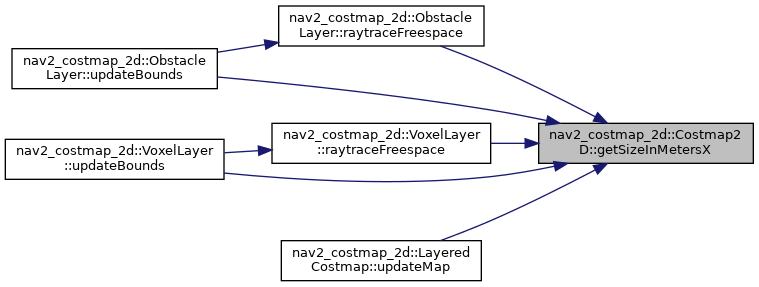
◆ getSizeInMetersX()
| double nav2_costmap_2d::Costmap2D::getSizeInMetersX | ( | ) | const |
Accessor for the x size of the costmap in meters.
- Returns
- The x size of the costmap (returns the centerpoint of the last legal cell in the map)
Definition at line 511 of file costmap_2d.cpp.
Referenced by nav2_costmap_2d::ObstacleLayer::raytraceFreespace(), nav2_costmap_2d::VoxelLayer::raytraceFreespace(), nav2_costmap_2d::ObstacleLayer::updateBounds(), nav2_costmap_2d::VoxelLayer::updateBounds(), and nav2_costmap_2d::LayeredCostmap::updateMap().
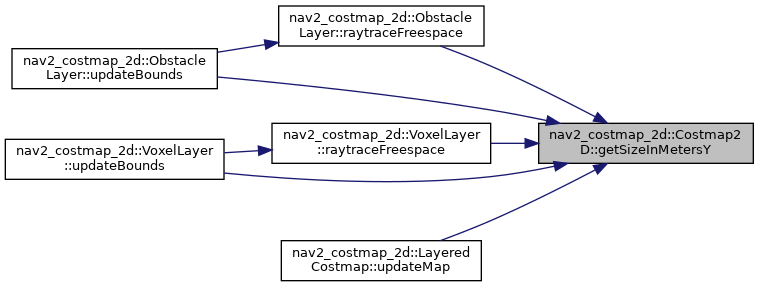
◆ getSizeInMetersY()
| double nav2_costmap_2d::Costmap2D::getSizeInMetersY | ( | ) | const |
Accessor for the y size of the costmap in meters.
- Returns
- The y size of the costmap (returns the centerpoint of the last legal cell in the map)
Definition at line 516 of file costmap_2d.cpp.
Referenced by nav2_costmap_2d::ObstacleLayer::raytraceFreespace(), nav2_costmap_2d::VoxelLayer::raytraceFreespace(), nav2_costmap_2d::ObstacleLayer::updateBounds(), nav2_costmap_2d::VoxelLayer::updateBounds(), and nav2_costmap_2d::LayeredCostmap::updateMap().
◆ indexToCells()
|
inline |
Given an index... compute the associated map coordinates.
- Parameters
-
index The index mx Will be set to the x coordinate my Will be set to the y coordinate
Definition at line 222 of file costmap_2d.hpp.
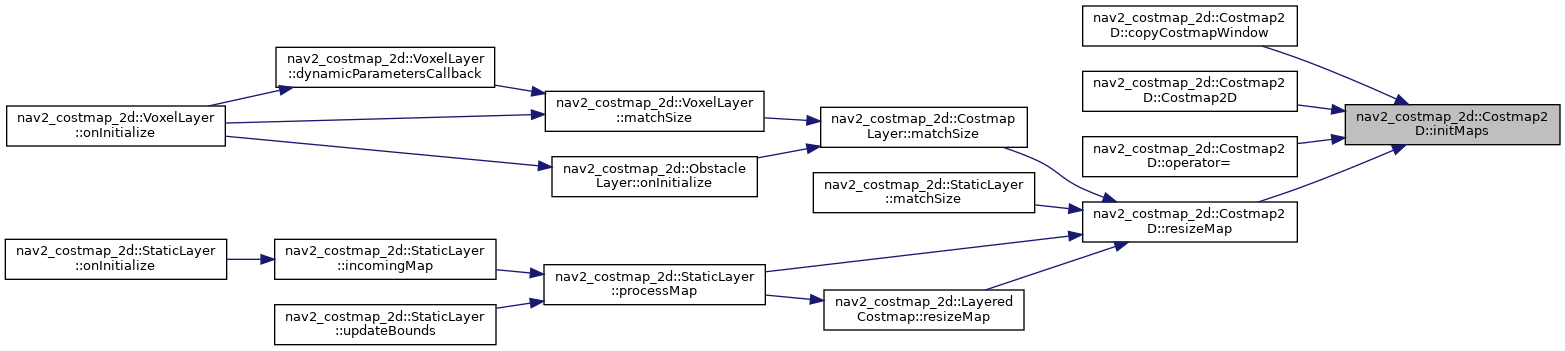
◆ initMaps()
|
protectedvirtual |
Initializes the costmap, static_map, and markers data structures.
- Parameters
-
size_x The x size to use for map initialization size_y The y size to use for map initialization
Definition at line 101 of file costmap_2d.cpp.
Referenced by copyCostmapWindow(), Costmap2D(), operator=(), and resizeMap().
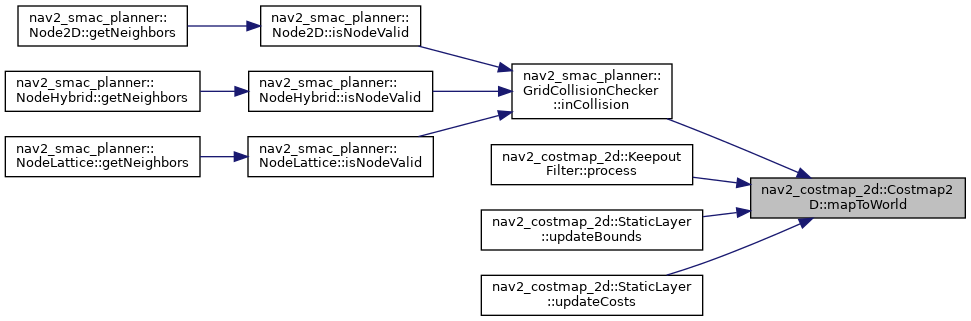
◆ mapToWorld()
| void nav2_costmap_2d::Costmap2D::mapToWorld | ( | unsigned int | mx, |
| unsigned int | my, | ||
| double & | wx, | ||
| double & | wy | ||
| ) | const |
Convert from map coordinates to world coordinates.
- Parameters
-
mx The x map coordinate my The y map coordinate wx Will be set to the associated world x coordinate wy Will be set to the associated world y coordinate
Definition at line 281 of file costmap_2d.cpp.
Referenced by nav2_smac_planner::GridCollisionChecker::inCollision(), nav2_costmap_2d::KeepoutFilter::process(), nav2_costmap_2d::StaticLayer::updateBounds(), nav2_costmap_2d::KeepoutFilter::updateBounds(), and nav2_costmap_2d::StaticLayer::updateCosts().
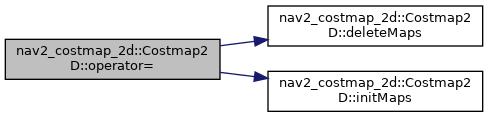
◆ operator=()
Overloaded assignment operator.
- Parameters
-
map The costmap to copy
- Returns
- A reference to the map after the copy has finished
Definition at line 210 of file costmap_2d.cpp.
References deleteMaps(), and initMaps().
◆ polygonOutlineCells()
| void nav2_costmap_2d::Costmap2D::polygonOutlineCells | ( | const std::vector< MapLocation > & | polygon, |
| std::vector< MapLocation > & | polygon_cells | ||
| ) |
Get the map cells that make up the outline of a polygon.
- Parameters
-
polygon The polygon in map coordinates to rasterize polygon_cells Will be set to the cells contained in the outline of the polygon
Definition at line 415 of file costmap_2d.cpp.
References raytraceLine().
Referenced by convexFillCells().


◆ raytraceLine()
|
inlineprotected |
Raytrace a line and apply some action at each step.
- Parameters
-
at The action to take... a functor x0 The starting x coordinate y0 The starting y coordinate x1 The ending x coordinate y1 The ending y coordinate max_length The maximum desired length of the segment... allows you to not go all the way to the endpoint min_length The minimum desired length of the segment
Definition at line 430 of file costmap_2d.hpp.
Referenced by polygonOutlineCells(), and nav2_costmap_2d::ObstacleLayer::raytraceFreespace().

◆ saveMap()
| bool nav2_costmap_2d::Costmap2D::saveMap | ( | std::string | file_name | ) |
Save the costmap out to a pgm file.
- Parameters
-
file_name The name of the file to save
Definition at line 536 of file costmap_2d.cpp.
References getCost().

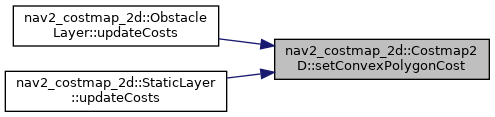
◆ setConvexPolygonCost()
| bool nav2_costmap_2d::Costmap2D::setConvexPolygonCost | ( | const std::vector< geometry_msgs::msg::Point > & | polygon, |
| unsigned char | cost_value | ||
| ) |
Sets the cost of a convex polygon to a desired value.
- Parameters
-
polygon The polygon to perform the operation on cost_value The value to set costs to
- Returns
- True if the polygon was filled... false if it could not be filled
Definition at line 386 of file costmap_2d.cpp.
References convexFillCells(), getIndex(), and worldToMap().
Referenced by nav2_costmap_2d::ObstacleLayer::updateCosts(), and nav2_costmap_2d::StaticLayer::updateCosts().

◆ setCost()
| void nav2_costmap_2d::Costmap2D::setCost | ( | unsigned int | mx, |
| unsigned int | my, | ||
| unsigned char | cost | ||
| ) |
Set the cost of a cell in the costmap.
- Parameters
-
mx The x coordinate of the cell my The y coordinate of the cell cost The cost to set the cell to
Definition at line 276 of file costmap_2d.cpp.
References getIndex().
Referenced by nav2_navfn_planner::NavfnPlanner::clearRobotCell(), and nav2_costmap_2d::StaticLayer::updateCosts().


◆ setDefaultValue()
|
inline |
Set the default background value of the costmap.
- Parameters
-
c default value
Definition at line 280 of file costmap_2d.hpp.
Referenced by nav2_costmap_2d::LayeredCostmap::LayeredCostmap().

◆ updateOrigin()
|
virtual |
Move the origin of the costmap to a new location.... keeping data when it can.
- Parameters
-
new_origin_x The x coordinate of the new origin new_origin_y The y coordinate of the new origin
Reimplemented in nav2_costmap_2d::VoxelLayer.
Definition at line 330 of file costmap_2d.cpp.
References copyMapRegion(), and resetMaps().
Referenced by nav2_costmap_2d::ObstacleLayer::updateBounds(), and nav2_costmap_2d::LayeredCostmap::updateMap().
◆ worldToMap()
| bool nav2_costmap_2d::Costmap2D::worldToMap | ( | double | wx, |
| double | wy, | ||
| unsigned int & | mx, | ||
| unsigned int & | my | ||
| ) | const |
Convert from world coordinates to map coordinates.
- Parameters
-
wx The x world coordinate wy The y world coordinate mx Will be set to the associated map x coordinate my Will be set to the associated map y coordinate
- Returns
- True if the conversion was successful (legal bounds) false otherwise
Definition at line 287 of file costmap_2d.cpp.
Referenced by copyCostmapWindow(), nav2_navfn_planner::NavfnPlanner::createPlan(), nav2_smac_planner::SmacPlanner2D::createPlan(), nav2_smac_planner::SmacPlannerHybrid::createPlan(), nav2_smac_planner::SmacPlannerLattice::createPlan(), nav2_smac_planner::Smoother::findBoundaryExpansion(), nav2_costmap_2d::LayeredCostmap::isOutofBounds(), nav2_planner::PlannerServer::isPathValid(), dwb_critics::PathDistCritic::prepare(), nav2_costmap_2d::ObstacleLayer::raytraceFreespace(), dwb_critics::BaseObstacleCritic::scorePose(), dwb_critics::MapGridCritic::scorePose(), dwb_critics::ObstacleFootprintCritic::scorePose(), setConvexPolygonCost(), nav2_smac_planner::Smoother::smoothImpl(), nav2_smoother::SimpleSmoother::smoothImpl(), nav2_costmap_2d::ObstacleLayer::updateBounds(), and nav2_costmap_2d::StaticLayer::updateCosts().
◆ worldToMapEnforceBounds()
| void nav2_costmap_2d::Costmap2D::worldToMapEnforceBounds | ( | double | wx, |
| double | wy, | ||
| int & | mx, | ||
| int & | my | ||
| ) | const |
Convert from world coordinates to map coordinates, constraining results to legal bounds.
- Parameters
-
wx The x world coordinate wy The y world coordinate mx Will be set to the associated map x coordinate my Will be set to the associated map y coordinate
- Note
- The returned map coordinates are guaranteed to lie within the map.
Definition at line 308 of file costmap_2d.cpp.
Referenced by nav2_costmap_2d::LayeredCostmap::updateMap().

◆ worldToMapNoBounds()
| void nav2_costmap_2d::Costmap2D::worldToMapNoBounds | ( | double | wx, |
| double | wy, | ||
| int & | mx, | ||
| int & | my | ||
| ) | const |
Convert from world coordinates to map coordinates without checking for legal bounds.
- Parameters
-
wx The x world coordinate wy The y world coordinate mx Will be set to the associated map x coordinate my Will be set to the associated map y coordinate
- Note
- The returned map coordinates are not guaranteed to lie within the map.
Definition at line 302 of file costmap_2d.cpp.
Referenced by nav2_costmap_2d::KeepoutFilter::process().

The documentation for this class was generated from the following files:
- nav2_costmap_2d/include/nav2_costmap_2d/costmap_2d.hpp
- nav2_costmap_2d/src/costmap_2d.cpp