Classes | |
| class | ClearCostmapService |
| Exposes services to clear costmap objects in inclusive/exclusive regions or completely. More... | |
| struct | MapLocation |
| class | Costmap2D |
| A 2D costmap provides a mapping between points in the world and their associated "costs". More... | |
| class | Costmap2DPublisher |
| A tool to periodically publish visualization data from a Costmap2D. More... | |
| class | Costmap2DROS |
| A ROS wrapper for a 2D Costmap. Handles subscribing to topics that provide observations about obstacles in either the form of PointCloud or LaserScan messages. More... | |
| class | BinaryFilter |
| Reads in a speed restriction mask and enables a robot to dynamically adjust speed based on pose in map to slow in dangerous areas. Done via absolute speed setting or percentage of maximum speed. More... | |
| class | CostmapFilter |
| : CostmapFilter basic class. It is inherited from Layer in order to avoid hidden problems when the shared handling of costmap_ resource (PR #1936) More... | |
| class | KeepoutFilter |
| Reads in a keepout mask and marks keepout regions in the map to prevent planning or control in restricted areas. More... | |
| class | SpeedFilter |
| Reads in a speed restriction mask and enables a robot to dynamically adjust speed based on pose in map to slow in dangerous areas. Done via absolute speed setting or percentage of maximum speed. More... | |
| class | CostmapLayer |
| A costmap layer base class for costmap plugin layers. Rather than just a layer, this object also contains an internal costmap object to populate and maintain state. More... | |
| class | CostmapSubscriber |
| Subscribes to the costmap via a ros topic. More... | |
| class | CostmapTopicCollisionChecker |
| Using a costmap via a ros topic, this object is used to find if robot poses are in collision with the costmap environment. More... | |
| class | Image |
| Image with pixels of type T Сan own data, be a wrapper over some memory buffer, or refer to a fragment of another image Pixels of one row are stored continuity. But rows continuity is not guaranteed. The distance (number of elements of type T) from row(i) to row(i + 1) is equal to step() More... | |
| class | MemoryBuffer |
| A memory buffer that can grow to an upper-bounded capacity. More... | |
| class | DenoiseLayer |
| Layer filters noise-induced standalone obstacles (white costmap pixels) or small obstacles groups. More... | |
| class | CollisionCheckerException |
| Exceptions thrown if collision checker determines a pose is in collision with the environment costmap. More... | |
| class | IllegalPoseException |
| Thrown when CollisionChecker encounters a fatal error. More... | |
| class | FootprintCollisionChecker |
| Checker for collision with a footprint on a costmap. More... | |
| class | FootprintSubscriber |
| Subscriber to the footprint topic to get current robot footprint (if changing) for use in collision avoidance. More... | |
| class | CellData |
| Storage for cell information used during obstacle inflation. More... | |
| class | InflationLayer |
| Layer to convolve costmap by robot's radius or footprint to prevent collisions and largely simply collision checking. More... | |
| class | Layer |
| Abstract class for layered costmap plugin implementations. More... | |
| class | LayeredCostmap |
| Instantiates different layer plugins and aggregates them into one score. More... | |
| class | Observation |
| Stores an observation in terms of a point cloud and the origin of the source. More... | |
| class | ObservationBuffer |
| Takes in point clouds from sensors, transforms them to the desired frame, and stores them. More... | |
| class | ObstacleLayer |
| Takes in laser and pointcloud data to populate into 2D costmap. More... | |
| class | RangeSensorLayer |
| Takes in IR/Sonar/similar point measurement sensors and populates in costmap. More... | |
| class | StaticLayer |
| Takes in a map generated from SLAM to add costs to costmap. More... | |
| class | VoxelLayer |
| Takes laser and pointcloud data to populate a 3D voxel representation of the environment. More... | |
Enumerations | |
| enum class | ConnectivityType : int { Way4 = 4 , Way8 = 8 } |
Functions | |
| std::vector< std::vector< float > > | parseVVF (const std::string &input, std::string &error_return) |
| Parse a vector of vectors of floats from a string. More... | |
| template<class Max > | |
| void | dilate (const Image< uint8_t > &input, Image< uint8_t > &output, ConnectivityType connectivity, Max &&max_function) |
| Perform morphological dilation. More... | |
| template<ConnectivityType connectivity, class Label , class IsBg > | |
| std::pair< Image< Label >, Label > | connectedComponents (const Image< uint8_t > &image, MemoryBuffer &buffer, imgproc_impl::EquivalenceLabelTrees< Label > &label_trees, IsBg &&is_background) |
| Compute the connected components labeled image of binary image Implements the SAUF algorithm (Two Strategies to Speed up Connected Component Labeling Algorithms Kesheng Wu, Ekow Otoo, Kenji Suzuki). More... | |
| template<ConnectivityType connectivity, class Label , class IsBg > | |
| Image< Label > | connectedComponents (const Image< uint8_t > &image, MemoryBuffer &buffer, imgproc_impl::EquivalenceLabelTrees< Label > &label_trees, const IsBg &is_background, Label &total_labels) |
| void | calculateMinAndMaxDistances (const std::vector< geometry_msgs::msg::Point > &footprint, double &min_dist, double &max_dist) |
| Calculate the extreme distances for the footprint. More... | |
| geometry_msgs::msg::Point | toPoint (geometry_msgs::msg::Point32 pt) |
| Convert Point32 to Point. | |
| geometry_msgs::msg::Point32 | toPoint32 (geometry_msgs::msg::Point pt) |
| Convert Point to Point32. | |
| geometry_msgs::msg::Polygon | toPolygon (std::vector< geometry_msgs::msg::Point > pts) |
| Convert vector of Points to Polygon msg. | |
| std::vector< geometry_msgs::msg::Point > | toPointVector (geometry_msgs::msg::Polygon::SharedPtr polygon) |
| Convert Polygon msg to vector of Points. | |
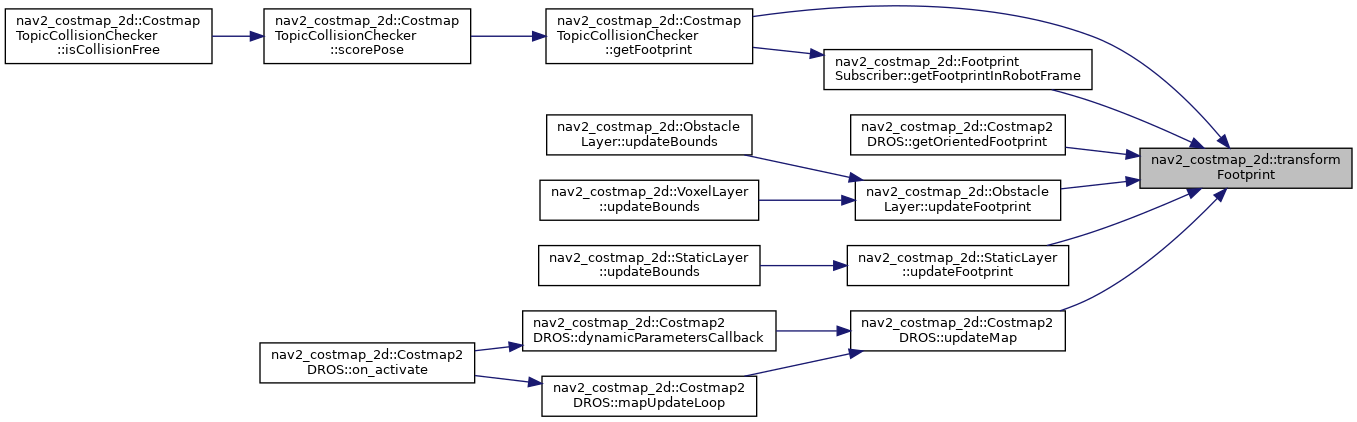
| void | transformFootprint (double x, double y, double theta, const std::vector< geometry_msgs::msg::Point > &footprint_spec, std::vector< geometry_msgs::msg::Point > &oriented_footprint) |
| Given a pose and base footprint, build the oriented footprint of the robot (list of Points) More... | |
| void | transformFootprint (double x, double y, double theta, const std::vector< geometry_msgs::msg::Point > &footprint_spec, geometry_msgs::msg::PolygonStamped &oriented_footprint) |
| Given a pose and base footprint, build the oriented footprint of the robot (PolygonStamped) More... | |
| void | padFootprint (std::vector< geometry_msgs::msg::Point > &footprint, double padding) |
| Adds the specified amount of padding to the footprint (in place) | |
| std::vector< geometry_msgs::msg::Point > | makeFootprintFromRadius (double radius) |
| Create a circular footprint from a given radius. | |
| bool | makeFootprintFromString (const std::string &footprint_string, std::vector< geometry_msgs::msg::Point > &footprint) |
| Make the footprint from the given string. More... | |
Detailed Description
Provides a mapping for often used cost values
Provides constants used in costmap filters
Enumeration Type Documentation
◆ ConnectivityType
|
strong |
| Enumerator | |
|---|---|
| Way4 | neighbors pixels are connected horizontally and vertically |
| Way8 | neighbors pixels are connected horizontally, vertically and diagonally |
Definition at line 33 of file image_processing.hpp.
Function Documentation
◆ calculateMinAndMaxDistances()
| void nav2_costmap_2d::calculateMinAndMaxDistances | ( | const std::vector< geometry_msgs::msg::Point > & | footprint, |
| double & | min_dist, | ||
| double & | max_dist | ||
| ) |
Calculate the extreme distances for the footprint.
- Parameters
-
footprint The footprint to examine min_dist Output parameter of the minimum distance max_dist Output parameter of the maximum distance
Definition at line 43 of file footprint.cpp.
Referenced by nav2_costmap_2d::LayeredCostmap::setFootprint().

◆ connectedComponents()
| std::pair<Image<Label>, Label> nav2_costmap_2d::connectedComponents | ( | const Image< uint8_t > & | image, |
| MemoryBuffer & | buffer, | ||
| imgproc_impl::EquivalenceLabelTrees< Label > & | label_trees, | ||
| IsBg && | is_background | ||
| ) |
Compute the connected components labeled image of binary image Implements the SAUF algorithm (Two Strategies to Speed up Connected Component Labeling Algorithms Kesheng Wu, Ekow Otoo, Kenji Suzuki).
- Template Parameters
-
connectivity pixels connectivity type Label integer type of label IsBg functor with signature bool (uint8_t)
- Parameters
-
image input image buffer memory block that will be used to store the result (labeled image) and the internal buffer for labels trees label_trees union-find data structure is_background returns true if the passed pixel value is background
- Exceptions
-
LabelOverflow if all possible values of the Label type are used and it is impossible to create a new unique
- Returns
- pair(labeled image, total number of labels) Labeled image has the same size as image. Label 0 represents the background label, labels [1, <return value> - 1] - separate components. Total number of labels == 0 for empty image. In other cases, label 0 is always counted, even if there is no background in the image. For example, for an image of one background pixel, the total number of labels == 2. Two labels (0, 1) have been counted, although label 0 is not used)
◆ dilate()
|
inline |
Perform morphological dilation.
- Template Parameters
-
Max function object
- Parameters
-
input input image output output image connectivity selector for selecting structuring element (Way4-> cross, Way8-> rect) max_function takes as input std::initializer_list<uint8_t> with three elements. Returns the greatest value in list
Definition at line 94 of file image_processing.hpp.
◆ makeFootprintFromString()
| bool nav2_costmap_2d::makeFootprintFromString | ( | const std::string & | footprint_string, |
| std::vector< geometry_msgs::msg::Point > & | footprint | ||
| ) |
Make the footprint from the given string.
Format should be bracketed array of arrays of floats, like so: [[1.0, 2.2], [3.3, 4.2], ...]
Definition at line 174 of file footprint.cpp.
References parseVVF().
Referenced by nav2_costmap_2d::Costmap2DROS::dynamicParametersCallback(), nav2_costmap_2d::Costmap2DROS::getParameters(), and nav2_costmap_2d::Costmap2DROS::on_configure().


◆ parseVVF()
| std::vector< std::vector< float > > nav2_costmap_2d::parseVVF | ( | const std::string & | input, |
| std::string & | error_return | ||
| ) |
Parse a vector of vectors of floats from a string.
Parse a vector of vector of floats from a string.
- Parameters
-
error_return If no error, error_return is set to "". If error, error_return will describe the error. Syntax is [[1.0, 2.0], [3.3, 4.4, 5.5], ...]
On error, error_return is set and the return value could be anything, like part of a successful parse.
- Parameters
-
input error_return Syntax is [[1.0, 2.0], [3.3, 4.4, 5.5], ...]
Definition at line 44 of file array_parser.cpp.
Referenced by makeFootprintFromString().

◆ transformFootprint() [1/2]
| void nav2_costmap_2d::transformFootprint | ( | double | x, |
| double | y, | ||
| double | theta, | ||
| const std::vector< geometry_msgs::msg::Point > & | footprint_spec, | ||
| geometry_msgs::msg::PolygonStamped & | oriented_footprint | ||
| ) |
Given a pose and base footprint, build the oriented footprint of the robot (PolygonStamped)
- Parameters
-
x The x position of the robot y The y position of the robot theta The orientation of the robot footprint_spec Basic shape of the footprint oriented_footprint Will be filled with the points in the oriented footprint of the robot
Definition at line 127 of file footprint.cpp.
◆ transformFootprint() [2/2]
| void nav2_costmap_2d::transformFootprint | ( | double | x, |
| double | y, | ||
| double | theta, | ||
| const std::vector< geometry_msgs::msg::Point > & | footprint_spec, | ||
| std::vector< geometry_msgs::msg::Point > & | oriented_footprint | ||
| ) |
Given a pose and base footprint, build the oriented footprint of the robot (list of Points)
- Parameters
-
x The x position of the robot y The y position of the robot theta The orientation of the robot footprint_spec Basic shape of the footprint oriented_footprint Will be filled with the points in the oriented footprint of the robot
Definition at line 109 of file footprint.cpp.
Referenced by nav2_costmap_2d::CostmapTopicCollisionChecker::getFootprint(), nav2_costmap_2d::FootprintSubscriber::getFootprintInRobotFrame(), nav2_costmap_2d::Costmap2DROS::getOrientedFootprint(), nav2_costmap_2d::ObstacleLayer::updateFootprint(), nav2_costmap_2d::StaticLayer::updateFootprint(), and nav2_costmap_2d::Costmap2DROS::updateMap().