Image with pixels of type T Сan own data, be a wrapper over some memory buffer, or refer to a fragment of another image Pixels of one row are stored continuity. But rows continuity is not guaranteed. The distance (number of elements of type T) from row(i) to row(i + 1) is equal to step() More...
#include <nav2_costmap_2d/include/nav2_costmap_2d/denoise/image.hpp>
Public Member Functions | |
| Image ()=default | |
| Create empty image. | |
| Image (size_t rows, size_t columns, T *data, size_t step) | |
| Create image referencing to a third-party buffer. More... | |
| Image (const Image &other) | |
| Create image referencing to the other Share image data between new and old object. Changing data in a new object will affect the given one and vice versa. | |
| Image (Image &&other) noexcept | |
| Create image from the other (move constructor) | |
| size_t | rows () const |
| size_t | columns () const |
| bool | empty () const |
| size_t | step () const |
| T * | row (size_t row) |
| const T * | row (size_t row) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. | |
| template<class Functor > | |
| void | forEach (Functor &&fn) |
| Read (and modify, if need) each pixel sequentially. More... | |
| template<class Functor > | |
| void | forEach (Functor &&fn) const |
| Read each pixel sequentially. More... | |
| template<class TargetElement , class Converter > | |
| void | convert (Image< TargetElement > &target, Converter &&converter) const |
| Convert each pixel to corresponding pixel of target using a custom function. More... | |
Detailed Description
template<class T>
class nav2_costmap_2d::Image< T >
Image with pixels of type T Сan own data, be a wrapper over some memory buffer, or refer to a fragment of another image Pixels of one row are stored continuity. But rows continuity is not guaranteed. The distance (number of elements of type T) from row(i) to row(i + 1) is equal to step()
- Template Parameters
-
T type of pixel
Constructor & Destructor Documentation
◆ Image()
| nav2_costmap_2d::Image< T >::Image | ( | size_t | rows, |
| size_t | columns, | ||
| T * | data, | ||
| size_t | step | ||
| ) |
Create image referencing to a third-party buffer.
- Parameters
-
rows number of image rows columns number of image columns data existing memory buffer with size at least rows * columns step offset from row(i) to row(i + 1) in memory buffer (number of elements of type T). offset = columns if rows are stored continuity
Member Function Documentation
◆ columns()
|
inline |
- Returns
- number of image columns
Definition at line 64 of file image.hpp.
Referenced by nav2_costmap_2d::Image< T >::convert().

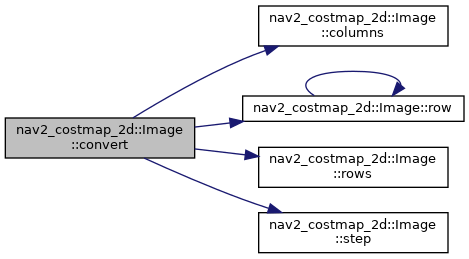
◆ convert()
| void nav2_costmap_2d::Image< T >::convert | ( | Image< TargetElement > & | target, |
| Converter && | converter | ||
| ) | const |
Convert each pixel to corresponding pixel of target using a custom function.
The source and target must be the same size. For calculation of new target value the operation can use source value and an optionally current target value. This function call operation(this[i, j], target[i, j]) for each pixel where target[i, j] is mutable
- Template Parameters
-
TargetElement type of target pixel Converter function object. Signature should be equivalent to the following: void fn(const T& src, TargetElement& trg)
- Parameters
-
target output image with TargetElement-type pixels operation the binary operation op is applied to pairs of pixels: first (const) from source and second (mutable) from target
- Exceptions
-
std::logic_error if the source and target of different sizes
Definition at line 184 of file image.hpp.
References nav2_costmap_2d::Image< T >::columns(), nav2_costmap_2d::Image< T >::row(), nav2_costmap_2d::Image< T >::rows(), and nav2_costmap_2d::Image< T >::step().
Referenced by nav2_common.launch.rewritten_yaml.RewrittenYaml::describe().

◆ empty()
|
inline |
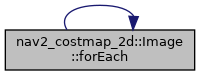
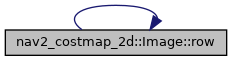
◆ forEach() [1/2]
| void nav2_costmap_2d::Image< T >::forEach | ( | Functor && | fn | ) |
Read (and modify, if need) each pixel sequentially.
- Template Parameters
-
Functor function object. Signature should be equivalent to the following: void fn(T& pixel) or void fn(const T& pixel)
- Parameters
-
fn a function that will be applied to each pixel in the image. Can modify image data
Definition at line 158 of file image.hpp.
References nav2_costmap_2d::Image< T >::forEach().
Referenced by nav2_costmap_2d::Image< T >::forEach().
◆ forEach() [2/2]
| void nav2_costmap_2d::Image< T >::forEach | ( | Functor && | fn | ) | const |
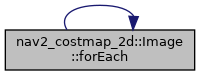
◆ row()
| T * nav2_costmap_2d::Image< T >::row | ( | size_t | row | ) |
- Returns
- pointer to first pixel of row
- Warning
- If row >= rows(), the behavior is undefined
Definition at line 145 of file image.hpp.
References nav2_costmap_2d::Image< T >::row().
Referenced by nav2_costmap_2d::Image< T >::convert(), and nav2_costmap_2d::Image< T >::row().

◆ rows()
|
inline |
- Returns
- number of image rows
Definition at line 61 of file image.hpp.
Referenced by nav2_costmap_2d::Image< T >::convert().

◆ step()
|
inline |
- Returns
- offset (number of elements of type T) from row(i) to row(i + 1)
Definition at line 70 of file image.hpp.
Referenced by nav2_costmap_2d::Image< T >::convert().

The documentation for this class was generated from the following file:
- nav2_costmap_2d/include/nav2_costmap_2d/denoise/image.hpp