NodeLattice implementation for graph, Hybrid-A*. More...
#include <nav2_smac_planner/include/nav2_smac_planner/node_lattice.hpp>
Public Types | |
| typedef NodeLattice * | NodePtr |
| typedef std::unique_ptr< std::vector< NodeLattice > > | Graph |
| typedef std::vector< NodePtr > | NodeVector |
| typedef NodeHybrid::Coordinates | Coordinates |
| typedef NodeHybrid::CoordinateVector | CoordinateVector |
Public Member Functions | |
| NodeLattice (const uint64_t index) | |
| A constructor for nav2_smac_planner::NodeLattice. More... | |
| ~NodeLattice () | |
| A destructor for nav2_smac_planner::NodeLattice. | |
| bool | operator== (const NodeLattice &rhs) |
| operator== for comparisons More... | |
| void | setPose (const Coordinates &pose_in) |
| setting continuous coordinate search poses (in partial-cells) More... | |
| void | reset () |
| Reset method for new search. | |
| void | setMotionPrimitive (MotionPrimitive *prim) |
| Sets the motion primitive used to achieve node in search. More... | |
| MotionPrimitive *& | getMotionPrimitive () |
| Gets the motion primitive used to achieve node in search. More... | |
| float | getAccumulatedCost () |
| Gets the accumulated cost at this node. More... | |
| void | setAccumulatedCost (const float &cost_in) |
| Sets the accumulated cost at this node. More... | |
| float | getCost () |
| Gets the costmap cost at this node. More... | |
| bool | wasVisited () |
| Gets if cell has been visited in search. More... | |
| void | visited () |
| Sets if cell has been visited in search. | |
| uint64_t | getIndex () |
| Gets cell index. More... | |
| void | backwards (bool back=true) |
| Sets that this primitive is moving in reverse. | |
| bool | isBackward () |
| Gets if this primitive is moving in reverse. More... | |
| bool | isNodeValid (const bool &traverse_unknown, GridCollisionChecker *collision_checker, MotionPrimitive *primitive=nullptr, bool is_backwards=false) |
| Check if this node is valid. More... | |
| float | getTraversalCost (const NodePtr &child) |
| Get traversal cost of parent node to child node. More... | |
| void | getNeighbors (std::function< bool(const uint64_t &, nav2_smac_planner::NodeLattice *&)> &validity_checker, GridCollisionChecker *collision_checker, const bool &traverse_unknown, NodeVector &neighbors) |
| Retrieve all valid neighbors of a node. More... | |
| bool | backtracePath (CoordinateVector &path) |
| Set the starting pose for planning, as a node index. More... | |
| void | addNodeToPath (NodePtr current_node, CoordinateVector &path) |
| add node to the path More... | |
Static Public Member Functions | |
| static uint64_t | getIndex (const unsigned int &x, const unsigned int &y, const unsigned int &angle) |
| Get index at coordinates. More... | |
| static Coordinates | getCoords (const uint64_t &index, const unsigned int &width, const unsigned int &angle_quantization) |
| Get coordinates at index. More... | |
| static float | getHeuristicCost (const Coordinates &node_coords, const CoordinateVector &goals_coords) |
| Get cost of heuristic of node. More... | |
| static void | initMotionModel (const MotionModel &motion_model, unsigned int &size_x, unsigned int &size_y, unsigned int &angle_quantization, SearchInfo &search_info) |
| Initialize motion models. More... | |
| static void | precomputeDistanceHeuristic (const float &lookup_table_dim, const MotionModel &motion_model, const unsigned int &dim_3_size, const SearchInfo &search_info) |
| Compute the SE2 distance heuristic. More... | |
| static void | resetObstacleHeuristic (std::shared_ptr< nav2_costmap_2d::Costmap2DROS > costmap_ros, const unsigned int &start_x, const unsigned int &start_y, const unsigned int &goal_x, const unsigned int &goal_y) |
| Compute the wavefront heuristic. More... | |
| static float | getObstacleHeuristic (const Coordinates &node_coords, const Coordinates &goal_coords, const double &cost_penalty) |
| Compute the Obstacle heuristic. More... | |
| static float | getDistanceHeuristic (const Coordinates &node_coords, const Coordinates &goal_coords, const float &obstacle_heuristic) |
| Compute the Distance heuristic. More... | |
Public Attributes | |
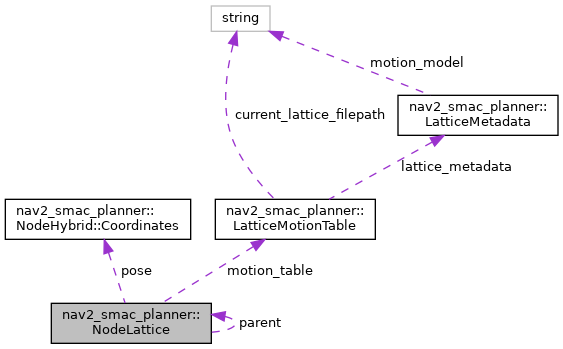
| NodeLattice * | parent |
| Coordinates | pose |
Static Public Attributes | |
| static NAV2_SMAC_PLANNER_COMMON_EXPORT LatticeMotionTable | motion_table |
| static NAV2_SMAC_PLANNER_COMMON_EXPORT LookupTable | dist_heuristic_lookup_table |
| static NAV2_SMAC_PLANNER_COMMON_EXPORT float | size_lookup = 25 |
Detailed Description
NodeLattice implementation for graph, Hybrid-A*.
Definition at line 121 of file node_lattice.hpp.
Constructor & Destructor Documentation
◆ NodeLattice()
|
explicit |
A constructor for nav2_smac_planner::NodeLattice.
- Parameters
-
index The index of this node for self-reference
Definition at line 187 of file node_lattice.cpp.
Member Function Documentation
◆ addNodeToPath()
| void nav2_smac_planner::NodeLattice::addNodeToPath | ( | NodeLattice::NodePtr | current_node, |
| NodeLattice::CoordinateVector & | path | ||
| ) |
add node to the path
- Parameters
-
current_node
Definition at line 585 of file node_lattice.cpp.
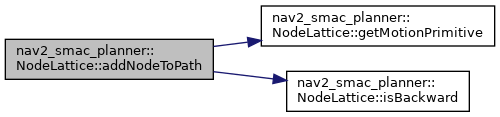
References getMotionPrimitive(), and isBackward().
Referenced by backtracePath().

◆ backtracePath()
| bool nav2_smac_planner::NodeLattice::backtracePath | ( | CoordinateVector & | path | ) |
Set the starting pose for planning, as a node index.
- Parameters
-
path Reference to a vector of indices of generated path
- Returns
- whether the path was able to be backtraced
Definition at line 566 of file node_lattice.cpp.
References addNodeToPath().

◆ getAccumulatedCost()
|
inline |
Gets the accumulated cost at this node.
- Returns
- accumulated cost
Definition at line 187 of file node_lattice.hpp.
◆ getCoords()
|
inlinestatic |
Get coordinates at index.
- Parameters
-
index Index of point width Width of costmap angle_quantization Theta size of costmap
- Returns
- Coordinates
Definition at line 299 of file node_lattice.hpp.
◆ getCost()
|
inline |
Gets the costmap cost at this node.
- Returns
- costmap cost
Definition at line 205 of file node_lattice.hpp.
Referenced by getTraversalCost().

◆ getDistanceHeuristic()
|
static |
Compute the Distance heuristic.
- Parameters
-
node_coords Coordinates to get heuristic at goal_coords Coordinates to compute heuristic to obstacle_heuristic Value of the obstacle heuristic to compute additional motion heuristics if required
- Returns
- heuristic Heuristic value
Definition at line 378 of file node_lattice.cpp.
References nav2_smac_planner::LatticeMotionTable::getAngleFromBin().
Referenced by getHeuristicCost().


◆ getHeuristicCost()
|
static |
Get cost of heuristic of node.
- Parameters
-
node Node index current node Node index of new
- Returns
- Heuristic cost between the nodes
Definition at line 345 of file node_lattice.cpp.
References getDistanceHeuristic(), and getObstacleHeuristic().

◆ getIndex() [1/2]
|
inline |
Gets cell index.
- Returns
- Reference to cell index
Definition at line 231 of file node_lattice.hpp.
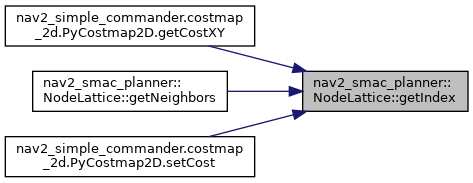
Referenced by nav2_simple_commander.costmap_2d.PyCostmap2D::getCostXY(), getNeighbors(), and nav2_simple_commander.costmap_2d.PyCostmap2D::setCost().
◆ getIndex() [2/2]
|
inlinestatic |
Get index at coordinates.
- Parameters
-
x X coordinate of point y Y coordinate of point angle Theta coordinate of point
- Returns
- Index
Definition at line 283 of file node_lattice.hpp.
References nav2_smac_planner::NodeHybrid::getIndex().
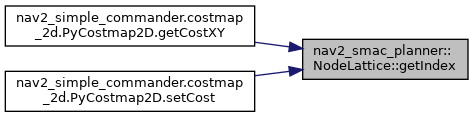
Referenced by nav2_simple_commander.costmap_2d.PyCostmap2D::getCostXY(), and nav2_simple_commander.costmap_2d.PyCostmap2D::setCost().

◆ getMotionPrimitive()
|
inline |
Gets the motion primitive used to achieve node in search.
- Returns
- pointer to motion primitive
Definition at line 178 of file node_lattice.hpp.
Referenced by addNodeToPath(), and getTraversalCost().

◆ getNeighbors()
| void nav2_smac_planner::NodeLattice::getNeighbors | ( | std::function< bool(const uint64_t &, nav2_smac_planner::NodeLattice *&)> & | validity_checker, |
| GridCollisionChecker * | collision_checker, | ||
| const bool & | traverse_unknown, | ||
| NodeVector & | neighbors | ||
| ) |
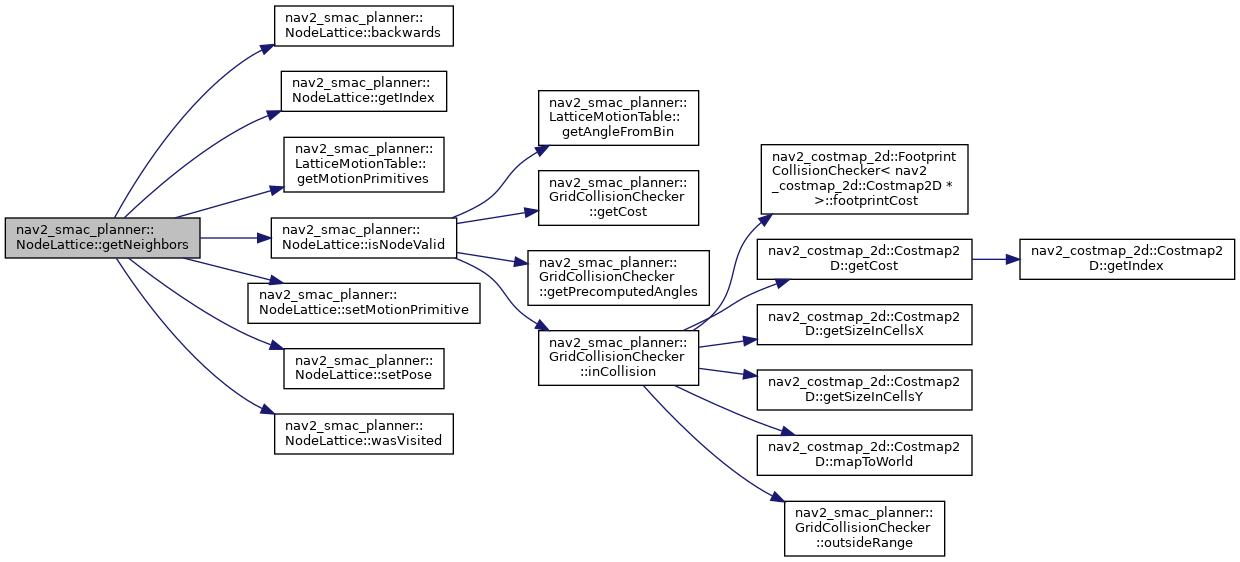
Retrieve all valid neighbors of a node.
- Parameters
-
validity_checker Functor for state validity checking collision_checker Collision checker to use traverse_unknown If unknown costs are valid to traverse neighbors Vector of neighbors to be filled
Definition at line 493 of file node_lattice.cpp.
References backwards(), getIndex(), nav2_smac_planner::LatticeMotionTable::getMotionPrimitives(), isNodeValid(), setMotionPrimitive(), setPose(), and wasVisited().
◆ getObstacleHeuristic()
|
inlinestatic |
Compute the Obstacle heuristic.
- Parameters
-
node_coords Coordinates to get heuristic at goal_coords Coordinates to compute heuristic to
- Returns
- heuristic Heuristic value
Definition at line 369 of file node_lattice.hpp.
References nav2_smac_planner::NodeHybrid::getObstacleHeuristic().
Referenced by getHeuristicCost().


◆ getTraversalCost()
| float nav2_smac_planner::NodeLattice::getTraversalCost | ( | const NodePtr & | child | ) |
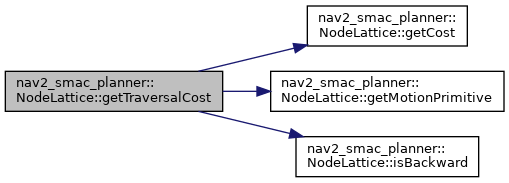
Get traversal cost of parent node to child node.
- Parameters
-
child Node pointer to child
- Returns
- traversal cost
Definition at line 295 of file node_lattice.cpp.
References getCost(), getMotionPrimitive(), and isBackward().
◆ initMotionModel()
|
static |
Initialize motion models.
- Parameters
-
motion_model Motion model enum to use size_x Size of X of graph size_y Size of y of graph angle_quantization Size of theta bins of graph search_info Search info to use
Definition at line 362 of file node_lattice.cpp.
◆ isBackward()
|
inline |
Gets if this primitive is moving in reverse.
- Returns
- backwards If moving in reverse
Definition at line 248 of file node_lattice.hpp.
Referenced by addNodeToPath(), and getTraversalCost().

◆ isNodeValid()
| bool nav2_smac_planner::NodeLattice::isNodeValid | ( | const bool & | traverse_unknown, |
| GridCollisionChecker * | collision_checker, | ||
| MotionPrimitive * | primitive = nullptr, |
||
| bool | is_backwards = false |
||
| ) |
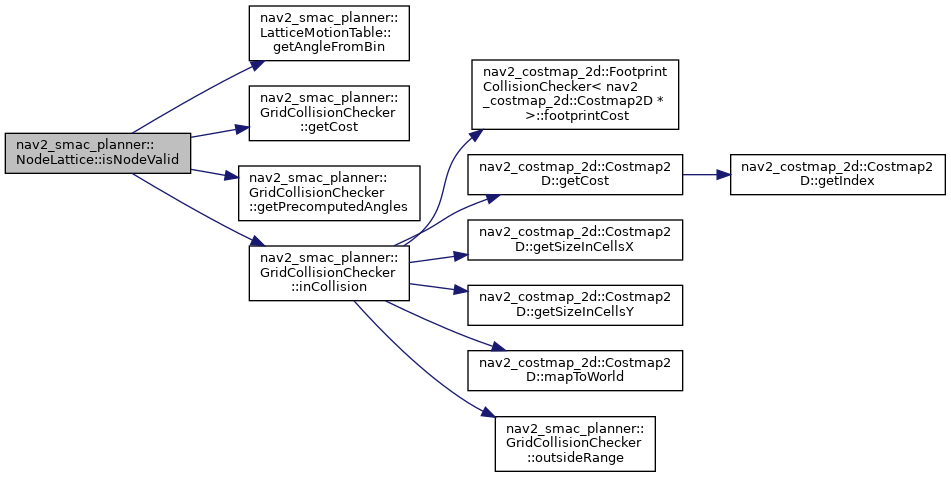
Check if this node is valid.
- Parameters
-
traverse_unknown If we can explore unknown nodes on the graph collision_checker Collision checker object to aid in validity checking primitive Optional argument if needing to check over a primitive not only a terminal pose is_backwards Optional argument if needed to check if prim expansion is in reverse
- Returns
- whether this node is valid and collision free
Definition at line 219 of file node_lattice.cpp.
References nav2_smac_planner::LatticeMotionTable::getAngleFromBin(), nav2_smac_planner::GridCollisionChecker::getCost(), nav2_smac_planner::GridCollisionChecker::getPrecomputedAngles(), and nav2_smac_planner::GridCollisionChecker::inCollision().
Referenced by getNeighbors().

◆ operator==()
|
inline |
operator== for comparisons
- Parameters
-
NodeLattice right hand side node reference
- Returns
- If cell indices are equal
Definition at line 146 of file node_lattice.hpp.
◆ precomputeDistanceHeuristic()
|
static |
Compute the SE2 distance heuristic.
- Parameters
-
lookup_table_dim Size, in costmap pixels, of the each lookup table dimension to populate motion_model Motion model to use for state space dim_3_size Number of quantization bins for caching search_info Info containing minimum radius to use
Definition at line 445 of file node_lattice.cpp.
◆ resetObstacleHeuristic()
|
inlinestatic |
Compute the wavefront heuristic.
- Parameters
-
costmap Costmap to use goal_coords Coordinates to start heuristic expansion at
Definition at line 354 of file node_lattice.hpp.
References nav2_smac_planner::NodeHybrid::resetObstacleHeuristic().

◆ setAccumulatedCost()
|
inline |
Sets the accumulated cost at this node.
- Parameters
-
reference to accumulated cost
Definition at line 196 of file node_lattice.hpp.
◆ setMotionPrimitive()
|
inline |
Sets the motion primitive used to achieve node in search.
- Parameters
-
pointer to motion primitive
Definition at line 169 of file node_lattice.hpp.
Referenced by getNeighbors().

◆ setPose()
|
inline |
setting continuous coordinate search poses (in partial-cells)
- Parameters
-
Pose pose
Definition at line 155 of file node_lattice.hpp.
Referenced by getNeighbors().

◆ wasVisited()
|
inline |
Gets if cell has been visited in search.
- Parameters
-
If cell was visited
Definition at line 214 of file node_lattice.hpp.
Referenced by getNeighbors().

The documentation for this class was generated from the following files:
- nav2_smac_planner/include/nav2_smac_planner/node_lattice.hpp
- nav2_smac_planner/src/node_lattice.cpp