A ROS wrapper for a 2D Costmap. Handles subscribing to topics that provide observations about obstacles in either the form of PointCloud or LaserScan messages. More...
#include <nav2_costmap_2d/include/nav2_costmap_2d/costmap_2d_ros.hpp>
Public Member Functions | |
| Costmap2DROS (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| Constructor for the wrapper. More... | |
| Costmap2DROS (const std::string &name, const std::string &parent_namespace="/", const bool &use_sim_time=false, const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| Constructor for the wrapper. More... | |
| void | init () |
| Common initialization for constructors. | |
| ~Costmap2DROS () | |
| A destructor. | |
| nav2::CallbackReturn | on_configure (const rclcpp_lifecycle::State &state) override |
| Configure node. | |
| nav2::CallbackReturn | on_activate (const rclcpp_lifecycle::State &state) override |
| Activate node. | |
| nav2::CallbackReturn | on_deactivate (const rclcpp_lifecycle::State &state) override |
| Deactivate node. | |
| nav2::CallbackReturn | on_cleanup (const rclcpp_lifecycle::State &state) override |
| Cleanup node. | |
| nav2::CallbackReturn | on_shutdown (const rclcpp_lifecycle::State &state) override |
| shutdown node | |
| void | on_rcl_preshutdown () override |
| as a child-LifecycleNode : Costmap2DROS may be launched by another Lifecycle Node as a composed module If composed, its parents will handle the shutdown, which includes this module | |
| void | start () |
| Subscribes to sensor topics if necessary and starts costmap updates, can be called to restart the costmap after calls to either stop() or pause() | |
| void | stop () |
| Stops costmap updates and unsubscribes from sensor topics. | |
| void | pause () |
| Stops the costmap from updating, but sensor data still comes in over the wire. | |
| void | resume () |
| Resumes costmap updates. | |
| void | updateMap () |
| Update the map with the layered costmap / plugins. | |
| void | resetLayers () |
| Reset each individual layer. | |
| bool | isCurrent () |
| Same as getLayeredCostmap()->isCurrent(). | |
| bool | getRobotPose (geometry_msgs::msg::PoseStamped &global_pose) |
| Get the pose of the robot in the global frame of the costmap. More... | |
| bool | transformPoseToGlobalFrame (const geometry_msgs::msg::PoseStamped &input_pose, geometry_msgs::msg::PoseStamped &transformed_pose) |
| Transform the input_pose in the global frame of the costmap. More... | |
| std::string | getName () const |
| Returns costmap name. | |
| double | getTransformTolerance () const |
| Returns the delay in transform (tf) data that is tolerable in seconds. | |
| Costmap2D * | getCostmap () |
| Return a pointer to the "master" costmap which receives updates from all the layers. More... | |
| std::string | getGlobalFrameID () |
| Returns the global frame of the costmap. More... | |
| std::string | getBaseFrameID () |
| Returns the local frame of the costmap. More... | |
| LayeredCostmap * | getLayeredCostmap () |
| Get the layered costmap object used in the node. | |
| geometry_msgs::msg::Polygon | getRobotFootprintPolygon () |
| Returns the current padded footprint as a geometry_msgs::msg::Polygon. | |
| std::vector< geometry_msgs::msg::Point > | getRobotFootprint () |
| Return the current footprint of the robot as a vector of points. More... | |
| std::vector< geometry_msgs::msg::Point > | getUnpaddedRobotFootprint () |
| Return the current unpadded footprint of the robot as a vector of points. More... | |
| void | getOrientedFootprint (std::vector< geometry_msgs::msg::Point > &oriented_footprint) |
| Build the oriented footprint of the robot at the robot's current pose. More... | |
| void | setRobotFootprint (const std::vector< geometry_msgs::msg::Point > &points) |
| Set the footprint of the robot to be the given set of points, padded by footprint_padding. More... | |
| void | setRobotFootprintPolygon (const geometry_msgs::msg::Polygon &footprint) |
| Set the footprint of the robot to be the given polygon, padded by footprint_padding. More... | |
| std::shared_ptr< tf2_ros::Buffer > | getTfBuffer () |
| bool | getUseRadius () |
| Get the costmap's use_radius_ parameter, corresponding to whether the footprint for the robot is a circle with radius robot_radius_ or an arbitrarily defined footprint in footprint_. More... | |
| double | getRobotRadius () |
| Get the costmap's robot_radius_ parameter, corresponding to raidus of the robot footprint when it is defined as as circle (i.e. when use_radius_ == true). More... | |
| void | getCostsCallback (const std::shared_ptr< rmw_request_id_t >, const std::shared_ptr< nav2_msgs::srv::GetCosts::Request > request, const std::shared_ptr< nav2_msgs::srv::GetCosts::Response > response) |
| Get the cost at a point in costmap. More... | |
 Public Member Functions inherited from nav2::LifecycleNode Public Member Functions inherited from nav2::LifecycleNode | |
| LifecycleNode (const std::string &node_name, const std::string &ns, const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A lifecycle node constructor. More... | |
| LifecycleNode (const std::string &node_name, const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A lifecycle node constructor with no namespace. More... | |
| template<typename ParameterT > | |
| ParameterT | declare_or_get_parameter (const std::string ¶meter_name, const ParameterDescriptor ¶meter_descriptor=ParameterDescriptor()) |
| Declares or gets a parameter with specified type (not value). If the parameter is already declared, returns its value; otherwise declares it with the specified type. More... | |
| template<typename ParamType > | |
| ParamType | declare_or_get_parameter (const std::string ¶meter_name, const ParamType &default_value, const ParameterDescriptor ¶meter_descriptor=ParameterDescriptor()) |
| Declares or gets a parameter. If the parameter is already declared, returns its value; otherwise declares it and returns the default value. More... | |
| template<typename MessageT , typename CallbackT > | |
| nav2::Subscription< MessageT >::SharedPtr | create_subscription (const std::string &topic_name, CallbackT &&callback, const rclcpp::QoS &qos=nav2::qos::StandardTopicQoS(), const rclcpp::CallbackGroup::SharedPtr &callback_group=nullptr) |
| Create a subscription to a topic using Nav2 QoS profiles and SubscriptionOptions. More... | |
| template<typename MessageT > | |
| nav2::Publisher< MessageT >::SharedPtr | create_publisher (const std::string &topic_name, const rclcpp::QoS &qos=nav2::qos::StandardTopicQoS(), const rclcpp::CallbackGroup::SharedPtr &callback_group=nullptr) |
| Create a publisher to a topic using Nav2 QoS profiles and PublisherOptions. More... | |
| template<typename ServiceT > | |
| nav2::ServiceClient< ServiceT >::SharedPtr | create_client (const std::string &service_name, bool use_internal_executor=false) |
| Create a ServiceClient to interface with a service. More... | |
| template<typename ServiceT > | |
| nav2::ServiceServer< ServiceT >::SharedPtr | create_service (const std::string &service_name, typename nav2::ServiceServer< ServiceT >::CallbackType cb, rclcpp::CallbackGroup::SharedPtr callback_group=nullptr) |
| Create a ServiceServer to host with a service. More... | |
| template<typename ActionT > | |
| nav2::SimpleActionServer< ActionT >::SharedPtr | create_action_server (const std::string &action_name, typename nav2::SimpleActionServer< ActionT >::ExecuteCallback execute_callback, typename nav2::SimpleActionServer< ActionT >::CompletionCallback compl_cb=nullptr, std::chrono::milliseconds server_timeout=std::chrono::milliseconds(500), bool spin_thread=false, const bool realtime=false) |
| Create a SimpleActionServer to host with an action. More... | |
| template<typename ActionT > | |
| nav2::ActionClient< ActionT >::SharedPtr | create_action_client (const std::string &action_name, rclcpp::CallbackGroup::SharedPtr callback_group=nullptr) |
| Create a ActionClient to call an action using. More... | |
| nav2::LifecycleNode::SharedPtr | shared_from_this () |
| Get a shared pointer of this. | |
| nav2::LifecycleNode::WeakPtr | weak_from_this () |
| Get a shared pointer of this. | |
| nav2::CallbackReturn | on_error (const rclcpp_lifecycle::State &) |
| Abstracted on_error state transition callback, since unimplemented as of 2020 in the managed ROS2 node state machine. More... | |
| void | autostart () |
| Automatically configure and active the node. | |
| void | createBond () |
| Create bond connection to lifecycle manager. | |
| void | destroyBond () |
| Destroy bond connection to lifecycle manager. | |
Protected Member Functions | |
| void | mapUpdateLoop (double frequency) |
| Function on timer for costmap update. | |
| void | getParameters () |
| Get parameters for node. | |
| rcl_interfaces::msg::SetParametersResult | dynamicParametersCallback (std::vector< rclcpp::Parameter > parameters) |
| Callback executed when a parameter change is detected. More... | |
| Protected Member Functions inherited from nav2::LifecycleNode | |
| void | printLifecycleNodeNotification () |
| Print notifications for lifecycle node. | |
| void | register_rcl_preshutdown_callback () |
| void | runCleanups () |
Protected Attributes | |
| nav2::Publisher< geometry_msgs::msg::PolygonStamped >::SharedPtr | footprint_pub_ |
| std::unique_ptr< Costmap2DPublisher > | costmap_publisher_ |
| std::vector< std::unique_ptr< Costmap2DPublisher > > | layer_publishers_ |
| nav2::Subscription< geometry_msgs::msg::Polygon >::SharedPtr | footprint_sub_ |
| nav2::Subscription< geometry_msgs::msg::PolygonStamped >::SharedPtr | footprint_stamped_sub_ |
| nav2::Subscription< rcl_interfaces::msg::ParameterEvent >::SharedPtr | parameter_sub_ |
| rclcpp::CallbackGroup::SharedPtr | callback_group_ |
| rclcpp::executors::SingleThreadedExecutor::SharedPtr | executor_ |
| std::unique_ptr< nav2::NodeThread > | executor_thread_ |
| std::shared_ptr< tf2_ros::Buffer > | tf_buffer_ |
| std::shared_ptr< tf2_ros::TransformListener > | tf_listener_ |
| std::unique_ptr< LayeredCostmap > | layered_costmap_ {nullptr} |
| std::string | name_ |
| bool | map_update_thread_shutdown_ {false} |
| std::atomic< bool > | stop_updates_ {false} |
| std::atomic< bool > | initialized_ {false} |
| std::atomic< bool > | stopped_ {true} |
| std::mutex | _dynamic_parameter_mutex |
| std::unique_ptr< std::thread > | map_update_thread_ |
| A thread for updating the map. | |
| rclcpp::Time | last_publish_ {0, 0, RCL_ROS_TIME} |
| rclcpp::Duration | publish_cycle_ {1, 0} |
| pluginlib::ClassLoader< Layer > | plugin_loader_ {"nav2_costmap_2d", "nav2_costmap_2d::Layer"} |
| bool | always_send_full_costmap_ {false} |
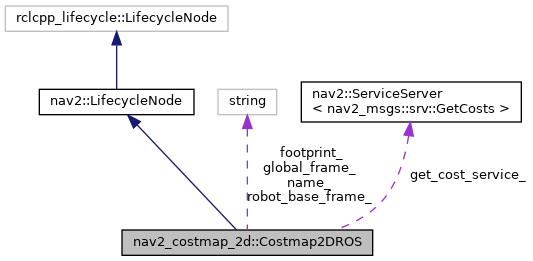
| std::string | footprint_ |
| float | footprint_padding_ {0} |
| std::string | global_frame_ |
| The global frame for the costmap. | |
| int | map_height_meters_ {0} |
| double | map_publish_frequency_ {0} |
| double | map_update_frequency_ {0} |
| int | map_width_meters_ {0} |
| double | origin_x_ {0} |
| double | origin_y_ {0} |
| std::vector< std::string > | default_plugins_ |
| std::vector< std::string > | default_types_ |
| std::vector< std::string > | plugin_names_ |
| std::vector< std::string > | plugin_types_ |
| std::vector< std::string > | filter_names_ |
| std::vector< std::string > | filter_types_ |
| double | resolution_ {0} |
| std::string | robot_base_frame_ |
| The frame_id of the robot base. | |
| double | robot_radius_ |
| bool | rolling_window_ {false} |
| Whether to use a rolling window version of the costmap. | |
| bool | track_unknown_space_ {false} |
| double | transform_tolerance_ {0} |
| The timeout before transform errors. | |
| double | initial_transform_timeout_ {0} |
| The timeout before activation of the node errors. | |
| double | map_vis_z_ {0} |
| bool | subscribe_to_stamped_footprint_ {false} |
| If true, the footprint subscriber expects a PolygonStamped msg. | |
| bool | is_lifecycle_follower_ {true} |
| whether is a child-LifecycleNode or an independent node | |
| bool | use_radius_ {false} |
| std::vector< geometry_msgs::msg::Point > | unpadded_footprint_ |
| std::vector< geometry_msgs::msg::Point > | padded_footprint_ |
| nav2::ServiceServer< nav2_msgs::srv::GetCosts >::SharedPtr | get_cost_service_ |
| std::unique_ptr< ClearCostmapService > | clear_costmap_service_ |
| OnSetParametersCallbackHandle::SharedPtr | dyn_params_handler |
| Protected Attributes inherited from nav2::LifecycleNode | |
| std::unique_ptr< rclcpp::PreShutdownCallbackHandle > | rcl_preshutdown_cb_handle_ {nullptr} |
| std::shared_ptr< bond::Bond > | bond_ {nullptr} |
| double | bond_heartbeat_period {0.1} |
| rclcpp::TimerBase::SharedPtr | autostart_timer_ |
Additional Inherited Members | |
| Public Types inherited from nav2::LifecycleNode | |
| using | SharedPtr = std::shared_ptr< nav2::LifecycleNode > |
| using | WeakPtr = std::weak_ptr< nav2::LifecycleNode > |
| using | SharedConstPointer = std::shared_ptr< const nav2::LifecycleNode > |
Detailed Description
A ROS wrapper for a 2D Costmap. Handles subscribing to topics that provide observations about obstacles in either the form of PointCloud or LaserScan messages.
Definition at line 76 of file costmap_2d_ros.hpp.
Constructor & Destructor Documentation
◆ Costmap2DROS() [1/2]
|
explicit |
Constructor for the wrapper.
- Parameters
-
options Additional options to control creation of the node.
Definition at line 61 of file costmap_2d_ros.cpp.
References init(), and is_lifecycle_follower_.

◆ Costmap2DROS() [2/2]
|
explicit |
Constructor for the wrapper.
- Parameters
-
name Name of the costmap ROS node which will also be used as a local namespace parent_namespace Absolute namespace of the node hosting the costmap node use_sim_time Whether to use simulation or real time
Definition at line 89 of file costmap_2d_ros.cpp.
References init().

Member Function Documentation
◆ dynamicParametersCallback()
|
protected |
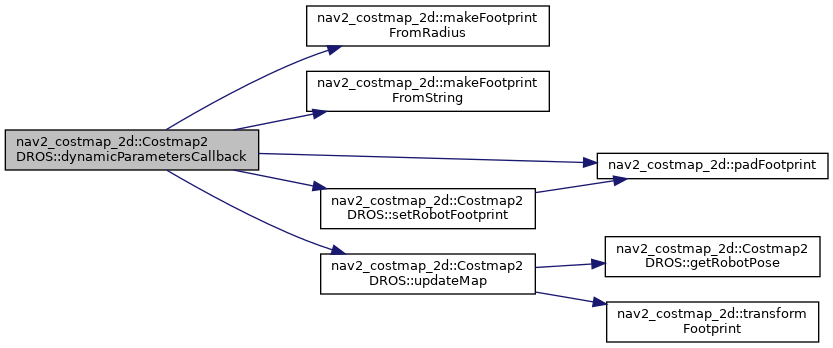
Callback executed when a parameter change is detected.
- Parameters
-
parameters list of changed parameters
Definition at line 731 of file costmap_2d_ros.cpp.
References global_frame_, nav2_costmap_2d::makeFootprintFromRadius(), nav2_costmap_2d::makeFootprintFromString(), nav2_costmap_2d::padFootprint(), robot_base_frame_, setRobotFootprint(), transform_tolerance_, and updateMap().
Referenced by on_activate().

◆ getBaseFrameID()
|
inline |
Returns the local frame of the costmap.
- Returns
- The local frame of the costmap
Definition at line 244 of file costmap_2d_ros.hpp.
References robot_base_frame_.
◆ getCostmap()
|
inline |
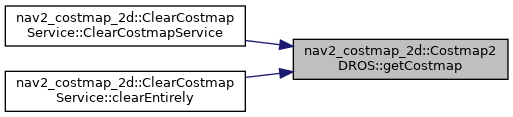
Return a pointer to the "master" costmap which receives updates from all the layers.
Same as calling getLayeredCostmap()->getCostmap().
Definition at line 226 of file costmap_2d_ros.hpp.
Referenced by nav2_costmap_2d::ClearCostmapService::ClearCostmapService(), and nav2_costmap_2d::ClearCostmapService::clearEntirely().
◆ getCostsCallback()
| void nav2_costmap_2d::Costmap2DROS::getCostsCallback | ( | const std::shared_ptr< rmw_request_id_t > | , |
| const std::shared_ptr< nav2_msgs::srv::GetCosts::Request > | request, | ||
| const std::shared_ptr< nav2_msgs::srv::GetCosts::Response > | response | ||
| ) |
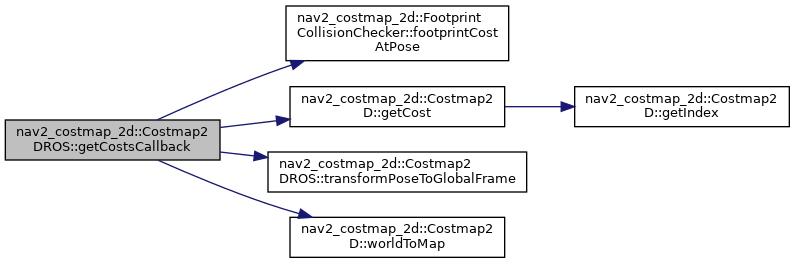
Get the cost at a point in costmap.
- Parameters
-
request x and y coordinates in map response cost of the point
Definition at line 842 of file costmap_2d_ros.cpp.
References nav2_costmap_2d::FootprintCollisionChecker< CostmapT >::footprintCostAtPose(), nav2_costmap_2d::Costmap2D::getCost(), transformPoseToGlobalFrame(), and nav2_costmap_2d::Costmap2D::worldToMap().
Referenced by on_configure().

◆ getGlobalFrameID()
|
inline |
Returns the global frame of the costmap.
- Returns
- The global frame of the costmap
Definition at line 235 of file costmap_2d_ros.hpp.
References global_frame_.
Referenced by nav2_costmap_2d::ClearCostmapService::clearAroundPose().

◆ getOrientedFootprint()
| void nav2_costmap_2d::Costmap2DROS::getOrientedFootprint | ( | std::vector< geometry_msgs::msg::Point > & | oriented_footprint | ) |
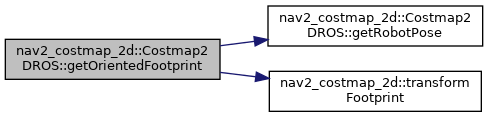
Build the oriented footprint of the robot at the robot's current pose.
- Parameters
-
oriented_footprint Will be filled with the points in the oriented footprint of the robot
Definition at line 500 of file costmap_2d_ros.cpp.
References getRobotPose(), and nav2_costmap_2d::transformFootprint().
◆ getRobotFootprint()
|
inline |
Return the current footprint of the robot as a vector of points.
This version of the footprint is padded by the footprint_padding_ distance, set in the rosparam "footprint_padding".
The footprint initially comes from the rosparam "footprint" but can be overwritten by dynamic reconfigure or by messages received on the "footprint" topic.
Definition at line 271 of file costmap_2d_ros.hpp.
◆ getRobotPose()
| bool nav2_costmap_2d::Costmap2DROS::getRobotPose | ( | geometry_msgs::msg::PoseStamped & | global_pose | ) |
Get the pose of the robot in the global frame of the costmap.
- Parameters
-
global_pose Will be set to the pose of the robot in the global frame of the costmap
- Returns
- True if the pose was set successfully, false otherwise
Definition at line 708 of file costmap_2d_ros.cpp.
References global_frame_, robot_base_frame_, and transform_tolerance_.
Referenced by getOrientedFootprint(), and updateMap().

◆ getRobotRadius()
|
inline |
Get the costmap's robot_radius_ parameter, corresponding to raidus of the robot footprint when it is defined as as circle (i.e. when use_radius_ == true).
- Returns
- robot_radius_
Definition at line 334 of file costmap_2d_ros.hpp.
◆ getUnpaddedRobotFootprint()
|
inline |
Return the current unpadded footprint of the robot as a vector of points.
This is the raw version of the footprint without padding.
The footprint initially comes from the rosparam "footprint" but can be overwritten by dynamic reconfigure or by messages received on the "footprint" topic.
Definition at line 283 of file costmap_2d_ros.hpp.
◆ getUseRadius()
|
inline |
Get the costmap's use_radius_ parameter, corresponding to whether the footprint for the robot is a circle with radius robot_radius_ or an arbitrarily defined footprint in footprint_.
- Returns
- use_radius_
Definition at line 326 of file costmap_2d_ros.hpp.
◆ setRobotFootprint()
| void nav2_costmap_2d::Costmap2DROS::setRobotFootprint | ( | const std::vector< geometry_msgs::msg::Point > & | points | ) |
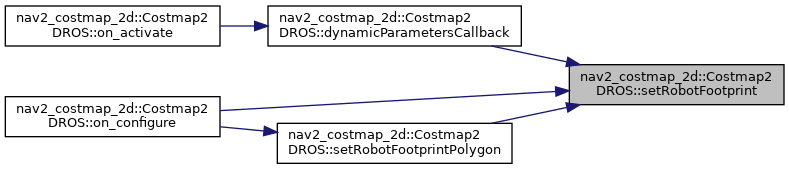
Set the footprint of the robot to be the given set of points, padded by footprint_padding.
Should be a convex polygon, though this is not enforced.
First expands the given polygon by footprint_padding_ and then sets padded_footprint_ and calls layered_costmap_->setFootprint(). Also saves the unpadded footprint, which is available from getUnpaddedRobotFootprint().
Definition at line 484 of file costmap_2d_ros.cpp.
References nav2_costmap_2d::padFootprint().
Referenced by dynamicParametersCallback(), on_configure(), and setRobotFootprintPolygon().

◆ setRobotFootprintPolygon()
| void nav2_costmap_2d::Costmap2DROS::setRobotFootprintPolygon | ( | const geometry_msgs::msg::Polygon & | footprint | ) |
Set the footprint of the robot to be the given polygon, padded by footprint_padding.
Should be a convex polygon, though this is not enforced.
First expands the given polygon by footprint_padding_ and then sets padded_footprint_ and calls layered_costmap_->setFootprint(). Also saves the unpadded footprint, which is available from getUnpaddedRobotFootprint().
Definition at line 493 of file costmap_2d_ros.cpp.
References setRobotFootprint(), and nav2_costmap_2d::toPointVector().
Referenced by on_configure().


◆ transformPoseToGlobalFrame()
| bool nav2_costmap_2d::Costmap2DROS::transformPoseToGlobalFrame | ( | const geometry_msgs::msg::PoseStamped & | input_pose, |
| geometry_msgs::msg::PoseStamped & | transformed_pose | ||
| ) |
Transform the input_pose in the global frame of the costmap.
- Parameters
-
input_pose pose to be transformed transformed_pose pose transformed
- Returns
- True if the pose was transformed successfully, false otherwise
Definition at line 716 of file costmap_2d_ros.cpp.
References global_frame_, and transform_tolerance_.
Referenced by getCostsCallback().

Member Data Documentation
◆ map_vis_z_
|
protected |
The height of map, allows to avoid flickering at -0.008
Definition at line 410 of file costmap_2d_ros.hpp.
Referenced by getParameters(), and on_configure().
The documentation for this class was generated from the following files:
- nav2_costmap_2d/include/nav2_costmap_2d/costmap_2d_ros.hpp
- nav2_costmap_2d/src/costmap_2d_ros.cpp