Public Member Functions | |
| None | __init__ (self, str node_name='basic_navigator', str namespace='') |
| None | destroyNode (self) |
| None | destroy_node (self) |
| None | setInitialPose (self, PoseStamped initial_pose) |
| Optional[RunningTask] | goThroughPoses (self, Goals poses, str behavior_tree='') |
| Optional[RunningTask] | goToPose (self, PoseStamped pose, str behavior_tree='') |
| Optional[RunningTask] | followWaypoints (self, list[PoseStamped] poses) |
| Optional[RunningTask] | followGpsWaypoints (self, list[GeoPose] gps_poses) |
| Optional[RunningTask] | spin (self, float spin_dist=1.57, int time_allowance=10, bool disable_collision_checks=False) |
| Optional[RunningTask] | backup (self, float backup_dist=0.15, float backup_speed=0.025, int time_allowance=10, bool disable_collision_checks=False) |
| Optional[RunningTask] | driveOnHeading (self, float dist=0.15, float speed=0.025, int time_allowance=10, bool disable_collision_checks=False) |
| Optional[RunningTask] | assistedTeleop (self, int time_allowance=30) |
| Optional[RunningTask] | followPath (self, Path path, str controller_id='', str goal_checker_id='') |
| Optional[RunningTask] | dockRobotByPose (self, PoseStamped dock_pose, str dock_type='', bool nav_to_dock=True) |
| Optional[RunningTask] | dockRobotByID (self, str dock_id, bool nav_to_dock=True) |
| Optional[RunningTask] | undockRobot (self, str dock_type='') |
| Optional[RunningTask] | followObjectByTopic (self, str topic, int max_duration=0) |
| Optional[RunningTask] | followObjectByFrame (self, str frame, int max_duration=0) |
| None | cancelTask (self) |
| bool | isTaskComplete (self, RunningTask task=RunningTask.NONE) |
| Any | getFeedback (self, RunningTask task=RunningTask.NONE) |
| TaskResult | getResult (self) |
| None | clearTaskError (self) |
| None | setTaskError (self, int error_code, str error_msg) |
| tuple[int, str] | getTaskError (self) |
| None | waitUntilNav2Active (self, str navigator='bt_navigator', str localizer='amcl') |
| Optional[Path] | getPath (self, PoseStamped start, PoseStamped goal, str planner_id='', bool use_start=False) |
| Optional[Path] | getPathThroughPoses (self, PoseStamped start, list[PoseStamped] goals, str planner_id='', bool use_start=False) |
| Optional[list[Union[Path, Route]]] | getRoute (self, Union[int, PoseStamped] start, Union[int, PoseStamped] goal, bool use_start=False) |
| Optional[RunningTask] | getAndTrackRoute (self, Union[int, PoseStamped] start, Union[int, PoseStamped] goal, bool use_start=False) |
| Optional[Path] | smoothPath (self, Path path, str smoother_id='', float max_duration=2.0, bool check_for_collision=False) |
| bool | changeMap (self, str map_filepath) |
| None | clearAllCostmaps (self) |
| None | clearLocalCostmap (self) |
| None | clearGlobalCostmap (self) |
| None | clearCostmapExceptRegion (self, float reset_distance) |
| None | clearCostmapAroundRobot (self, float reset_distance) |
| None | clearLocalCostmapAroundPose (self, PoseStamped pose, float reset_distance) |
| None | clearGlobalCostmapAroundPose (self, PoseStamped pose, float reset_distance) |
| Optional[Costmap] | getGlobalCostmap (self) |
| Optional[Costmap] | getLocalCostmap (self) |
| None | toggleCollisionMonitor (self, bool enable) |
| None | lifecycleStartup (self) |
| None | lifecycleShutdown (self) |
| None | info (self, str msg) |
| None | warn (self, str msg) |
| None | error (self, str msg) |
| None | debug (self, str msg) |
Detailed Description
Definition at line 76 of file robot_navigator.py.
Member Function Documentation
◆ cancelTask()
| None nav2_simple_commander.robot_navigator.BasicNavigator.cancelTask | ( | self | ) |
Cancel pending task request of any type.
Definition at line 689 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.clearTaskError(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, backup_tester.BackupTest.goal_handle, drive_tester.DriveTest.goal_handle, spin_tester.SpinTest.goal_handle, tester.GpsWaypointFollowerTest.goal_handle, tester.WaypointFollowerTest.goal_handle, loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, backup_tester.BackupTest.result_future, drive_tester.DriveTest.result_future, spin_tester.SpinTest.result_future, nav2_simple_commander.robot_navigator.BasicNavigator.route_goal_handle, nav2_simple_commander.robot_navigator.BasicNavigator.route_result_future, and nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError().
◆ changeMap()
| bool nav2_simple_commander.robot_navigator.BasicNavigator.changeMap | ( | self, | |
| str | map_filepath | ||
| ) |
Change the current static map in the map server.
Definition at line 1078 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.error(), loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), and nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError().
◆ clearAllCostmaps()
| None nav2_simple_commander.robot_navigator.BasicNavigator.clearAllCostmaps | ( | self | ) |
Clear all costmaps.
Definition at line 1111 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.clearGlobalCostmap(), and nav2_simple_commander.robot_navigator.BasicNavigator.clearLocalCostmap().

◆ clearCostmapAroundRobot()
| None nav2_simple_commander.robot_navigator.BasicNavigator.clearCostmapAroundRobot | ( | self, | |
| float | reset_distance | ||
| ) |
Clear the costmap around the robot.
Definition at line 1160 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.error(), loopback_simulator.LoopbackSimulator.info(), and nav2_simple_commander.robot_navigator.BasicNavigator.info().
◆ clearCostmapExceptRegion()
| None nav2_simple_commander.robot_navigator.BasicNavigator.clearCostmapExceptRegion | ( | self, | |
| float | reset_distance | ||
| ) |
Clear the costmap except for a specified region.
Definition at line 1145 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.error(), loopback_simulator.LoopbackSimulator.info(), and nav2_simple_commander.robot_navigator.BasicNavigator.info().
◆ clearGlobalCostmap()
| None nav2_simple_commander.robot_navigator.BasicNavigator.clearGlobalCostmap | ( | self | ) |
Clear global costmap.
Definition at line 1131 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.error(), loopback_simulator.LoopbackSimulator.info(), and nav2_simple_commander.robot_navigator.BasicNavigator.info().
Referenced by nav2_simple_commander.robot_navigator.BasicNavigator.clearAllCostmaps().

◆ clearGlobalCostmapAroundPose()
| None nav2_simple_commander.robot_navigator.BasicNavigator.clearGlobalCostmapAroundPose | ( | self, | |
| PoseStamped | pose, | ||
| float | reset_distance | ||
| ) |
Clear the global costmap around a given pose.
Definition at line 1191 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.error(), loopback_simulator.LoopbackSimulator.info(), and nav2_simple_commander.robot_navigator.BasicNavigator.info().
◆ clearLocalCostmap()
| None nav2_simple_commander.robot_navigator.BasicNavigator.clearLocalCostmap | ( | self | ) |
Clear local costmap.
Definition at line 1117 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.error(), loopback_simulator.LoopbackSimulator.info(), and nav2_simple_commander.robot_navigator.BasicNavigator.info().
Referenced by nav2_simple_commander.robot_navigator.BasicNavigator.clearAllCostmaps().

◆ clearLocalCostmapAroundPose()
| None nav2_simple_commander.robot_navigator.BasicNavigator.clearLocalCostmapAroundPose | ( | self, | |
| PoseStamped | pose, | ||
| float | reset_distance | ||
| ) |
Clear the costmap around a given pose.
Definition at line 1175 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.error(), loopback_simulator.LoopbackSimulator.info(), and nav2_simple_commander.robot_navigator.BasicNavigator.info().
◆ dockRobotByID()
| Optional[RunningTask] nav2_simple_commander.robot_navigator.BasicNavigator.dockRobotByID | ( | self, | |
| str | dock_id, | ||
| bool | nav_to_dock = True |
||
| ) |
Send a `DockRobot` action request.
Definition at line 585 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._feedbackCallback(), nav2_simple_commander.robot_navigator.BasicNavigator.clearTaskError(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, backup_tester.BackupTest.goal_handle, drive_tester.DriveTest.goal_handle, spin_tester.SpinTest.goal_handle, tester.GpsWaypointFollowerTest.goal_handle, tester.WaypointFollowerTest.goal_handle, loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, backup_tester.BackupTest.result_future, drive_tester.DriveTest.result_future, spin_tester.SpinTest.result_future, and nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError().
◆ followGpsWaypoints()
| Optional[RunningTask] nav2_simple_commander.robot_navigator.BasicNavigator.followGpsWaypoints | ( | self, | |
| list[GeoPose] | gps_poses | ||
| ) |
Send a `FollowGPSWaypoints` action request.
Definition at line 387 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._feedbackCallback(), nav2_simple_commander.robot_navigator.BasicNavigator.clearTaskError(), nav2_constrained_smoother::OptimizerParams.debug, loopback_simulator.LoopbackSimulator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, backup_tester.BackupTest.goal_handle, drive_tester.DriveTest.goal_handle, spin_tester.SpinTest.goal_handle, tester.GpsWaypointFollowerTest.goal_handle, tester.WaypointFollowerTest.goal_handle, loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, backup_tester.BackupTest.result_future, drive_tester.DriveTest.result_future, spin_tester.SpinTest.result_future, and nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError().
◆ followObjectByFrame()
| Optional[RunningTask] nav2_simple_commander.robot_navigator.BasicNavigator.followObjectByFrame | ( | self, | |
| str | frame, | ||
| int | max_duration = 0 |
||
| ) |
Send a `FollowObject` action request.
Definition at line 663 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._feedbackCallback(), nav2_simple_commander.robot_navigator.BasicNavigator.clearTaskError(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, backup_tester.BackupTest.goal_handle, drive_tester.DriveTest.goal_handle, spin_tester.SpinTest.goal_handle, tester.GpsWaypointFollowerTest.goal_handle, tester.WaypointFollowerTest.goal_handle, loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, backup_tester.BackupTest.result_future, drive_tester.DriveTest.result_future, spin_tester.SpinTest.result_future, and nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError().
◆ followObjectByTopic()
| Optional[RunningTask] nav2_simple_commander.robot_navigator.BasicNavigator.followObjectByTopic | ( | self, | |
| str | topic, | ||
| int | max_duration = 0 |
||
| ) |
Send a `FollowObject` action request.
Definition at line 637 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._feedbackCallback(), nav2_simple_commander.robot_navigator.BasicNavigator.clearTaskError(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, backup_tester.BackupTest.goal_handle, drive_tester.DriveTest.goal_handle, spin_tester.SpinTest.goal_handle, tester.GpsWaypointFollowerTest.goal_handle, tester.WaypointFollowerTest.goal_handle, loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, backup_tester.BackupTest.result_future, drive_tester.DriveTest.result_future, spin_tester.SpinTest.result_future, and nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError().
◆ followWaypoints()
| Optional[RunningTask] nav2_simple_commander.robot_navigator.BasicNavigator.followWaypoints | ( | self, | |
| list[PoseStamped] | poses | ||
| ) |
Send a `FollowWaypoints` action request.
Definition at line 361 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._feedbackCallback(), nav2_simple_commander.robot_navigator.BasicNavigator.clearTaskError(), nav2_constrained_smoother::OptimizerParams.debug, loopback_simulator.LoopbackSimulator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, backup_tester.BackupTest.goal_handle, drive_tester.DriveTest.goal_handle, spin_tester.SpinTest.goal_handle, tester.GpsWaypointFollowerTest.goal_handle, tester.WaypointFollowerTest.goal_handle, loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, backup_tester.BackupTest.result_future, drive_tester.DriveTest.result_future, spin_tester.SpinTest.result_future, and nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError().
◆ getAndTrackRoute()
| Optional[RunningTask] nav2_simple_commander.robot_navigator.BasicNavigator.getAndTrackRoute | ( | self, | |
| Union[int, PoseStamped] | start, | ||
| Union[int, PoseStamped] | goal, | ||
| bool | use_start = False |
||
| ) |
Send a `ComputeAndTrackRoute` action request.
Definition at line 981 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._routeFeedbackCallback(), nav2_simple_commander.robot_navigator.BasicNavigator.clearTaskError(), nav2_constrained_smoother::OptimizerParams.debug, loopback_simulator.LoopbackSimulator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, backup_tester.BackupTest.goal_handle, drive_tester.DriveTest.goal_handle, spin_tester.SpinTest.goal_handle, tester.GpsWaypointFollowerTest.goal_handle, tester.WaypointFollowerTest.goal_handle, loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, backup_tester.BackupTest.result_future, drive_tester.DriveTest.result_future, spin_tester.SpinTest.result_future, nav2_simple_commander.robot_navigator.BasicNavigator.route_goal_handle, nav2_simple_commander.robot_navigator.BasicNavigator.route_result_future, nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError(), nav2_behaviors::ResultStatus.status, Cell.status, nav2_simple_commander.robot_navigator.BasicNavigator.status, and nav2_waypoint_follower::GoalStatus.status.
◆ getFeedback()
| Any nav2_simple_commander.robot_navigator.BasicNavigator.getFeedback | ( | self, | |
| RunningTask | task = RunningTask.NONE |
||
| ) |
Get the pending action feedback message.
Definition at line 754 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.feedback.
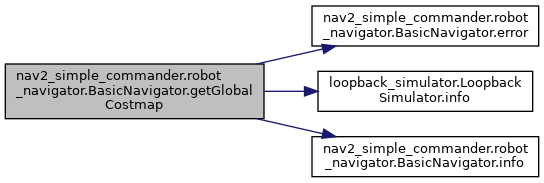
◆ getGlobalCostmap()
| Optional[Costmap] nav2_simple_commander.robot_navigator.BasicNavigator.getGlobalCostmap | ( | self | ) |
Get the global costmap.
Definition at line 1207 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.error(), loopback_simulator.LoopbackSimulator.info(), and nav2_simple_commander.robot_navigator.BasicNavigator.info().
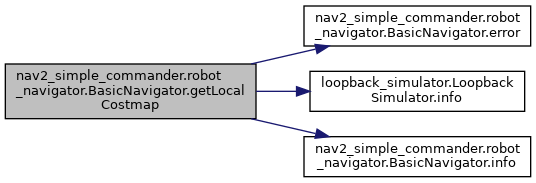
◆ getLocalCostmap()
| Optional[Costmap] nav2_simple_commander.robot_navigator.BasicNavigator.getLocalCostmap | ( | self | ) |
Get the local costmap.
Definition at line 1222 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.error(), loopback_simulator.LoopbackSimulator.info(), and nav2_simple_commander.robot_navigator.BasicNavigator.info().
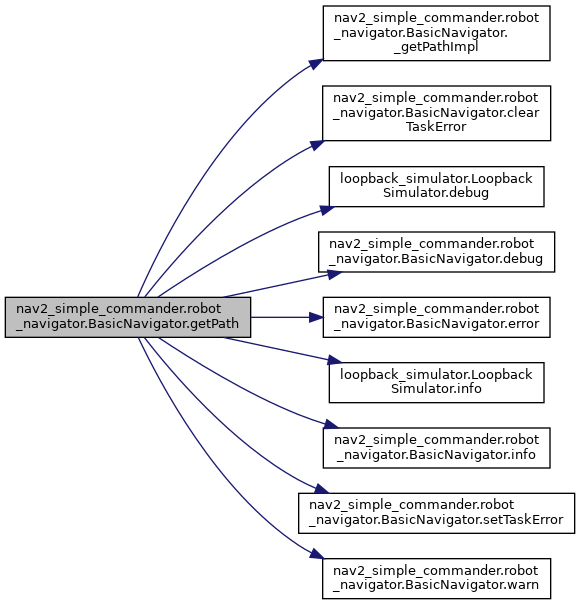
◆ getPath()
| Optional[Path] nav2_simple_commander.robot_navigator.BasicNavigator.getPath | ( | self, | |
| PoseStamped | start, | ||
| PoseStamped | goal, | ||
| str | planner_id = '', |
||
| bool | use_start = False |
||
| ) |
Send a `ComputePathToPose` action request.
Definition at line 833 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._getPathImpl(), nav2_simple_commander.robot_navigator.BasicNavigator.clearTaskError(), nav2_constrained_smoother::OptimizerParams.debug, loopback_simulator.LoopbackSimulator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, backup_tester.BackupTest.goal_handle, drive_tester.DriveTest.goal_handle, spin_tester.SpinTest.goal_handle, tester.GpsWaypointFollowerTest.goal_handle, tester.WaypointFollowerTest.goal_handle, loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, backup_tester.BackupTest.result_future, drive_tester.DriveTest.result_future, spin_tester.SpinTest.result_future, nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError(), nav2_behaviors::ResultStatus.status, Cell.status, nav2_simple_commander.robot_navigator.BasicNavigator.status, nav2_waypoint_follower::GoalStatus.status, and nav2_simple_commander.robot_navigator.BasicNavigator.warn().
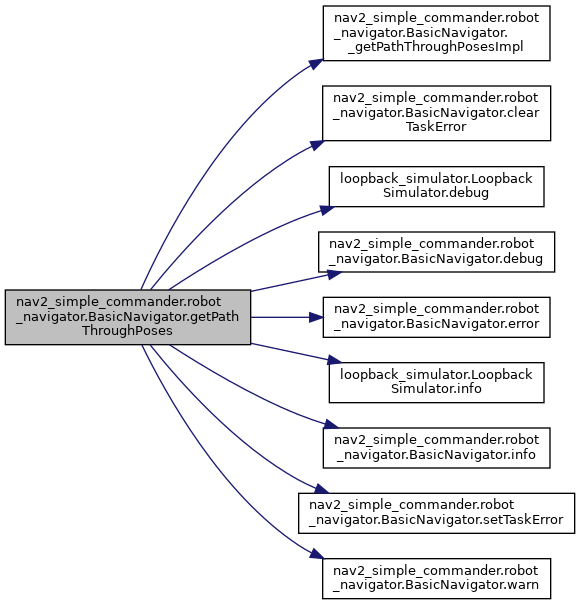
◆ getPathThroughPoses()
| Optional[Path] nav2_simple_commander.robot_navigator.BasicNavigator.getPathThroughPoses | ( | self, | |
| PoseStamped | start, | ||
| list[PoseStamped] | goals, | ||
| str | planner_id = '', |
||
| bool | use_start = False |
||
| ) |
Send a `ComputePathThroughPoses` action request.
Definition at line 895 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._getPathThroughPosesImpl(), nav2_simple_commander.robot_navigator.BasicNavigator.clearTaskError(), nav2_constrained_smoother::OptimizerParams.debug, loopback_simulator.LoopbackSimulator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, backup_tester.BackupTest.goal_handle, drive_tester.DriveTest.goal_handle, spin_tester.SpinTest.goal_handle, tester.GpsWaypointFollowerTest.goal_handle, tester.WaypointFollowerTest.goal_handle, loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, backup_tester.BackupTest.result_future, drive_tester.DriveTest.result_future, spin_tester.SpinTest.result_future, nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError(), nav2_behaviors::ResultStatus.status, Cell.status, nav2_simple_commander.robot_navigator.BasicNavigator.status, nav2_waypoint_follower::GoalStatus.status, and nav2_simple_commander.robot_navigator.BasicNavigator.warn().
◆ getResult()
| TaskResult nav2_simple_commander.robot_navigator.BasicNavigator.getResult | ( | self | ) |
Get the pending action result message.
Definition at line 762 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.last_action_error_code, nav2_simple_commander.robot_navigator.BasicNavigator.last_action_error_msg, nav2_behaviors::ResultStatus.status, Cell.status, nav2_simple_commander.robot_navigator.BasicNavigator.status, and nav2_waypoint_follower::GoalStatus.status.
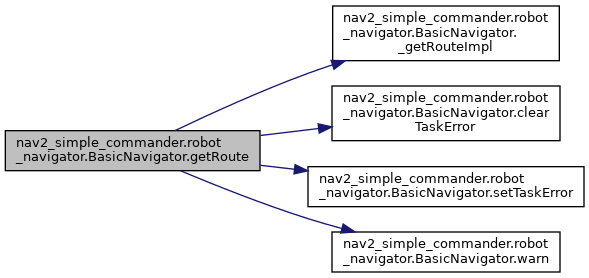
◆ getRoute()
| Optional[list[Union[Path, Route]]] nav2_simple_commander.robot_navigator.BasicNavigator.getRoute | ( | self, | |
| Union[int, PoseStamped] | start, | ||
| Union[int, PoseStamped] | goal, | ||
| bool | use_start = False |
||
| ) |
Send a `ComputeRoute` action request.
Definition at line 962 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._getRouteImpl(), nav2_simple_commander.robot_navigator.BasicNavigator.clearTaskError(), nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError(), nav2_behaviors::ResultStatus.status, Cell.status, nav2_simple_commander.robot_navigator.BasicNavigator.status, nav2_waypoint_follower::GoalStatus.status, and nav2_simple_commander.robot_navigator.BasicNavigator.warn().
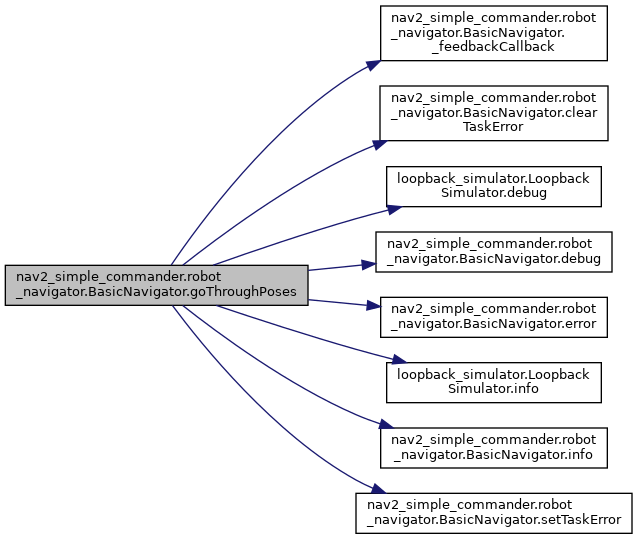
◆ goThroughPoses()
| Optional[RunningTask] nav2_simple_commander.robot_navigator.BasicNavigator.goThroughPoses | ( | self, | |
| Goals | poses, | ||
| str | behavior_tree = '' |
||
| ) |
Send a `NavThroughPoses` action request.
Definition at line 295 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._feedbackCallback(), nav2_simple_commander.robot_navigator.BasicNavigator.clearTaskError(), nav2_constrained_smoother::OptimizerParams.debug, loopback_simulator.LoopbackSimulator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, backup_tester.BackupTest.goal_handle, drive_tester.DriveTest.goal_handle, spin_tester.SpinTest.goal_handle, tester.GpsWaypointFollowerTest.goal_handle, tester.WaypointFollowerTest.goal_handle, loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, backup_tester.BackupTest.result_future, drive_tester.DriveTest.result_future, spin_tester.SpinTest.result_future, and nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError().
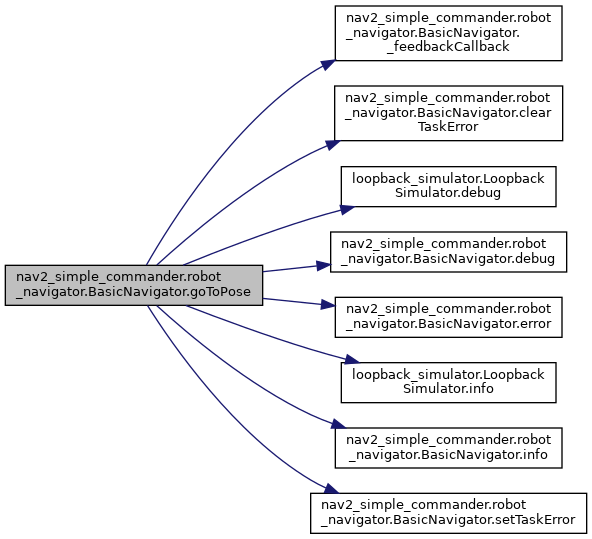
◆ goToPose()
| Optional[RunningTask] nav2_simple_commander.robot_navigator.BasicNavigator.goToPose | ( | self, | |
| PoseStamped | pose, | ||
| str | behavior_tree = '' |
||
| ) |
Send a `NavToPose` action request.
Definition at line 322 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._feedbackCallback(), nav2_simple_commander.robot_navigator.BasicNavigator.clearTaskError(), nav2_constrained_smoother::OptimizerParams.debug, loopback_simulator.LoopbackSimulator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, backup_tester.BackupTest.goal_handle, drive_tester.DriveTest.goal_handle, spin_tester.SpinTest.goal_handle, tester.GpsWaypointFollowerTest.goal_handle, tester.WaypointFollowerTest.goal_handle, loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, backup_tester.BackupTest.result_future, drive_tester.DriveTest.result_future, spin_tester.SpinTest.result_future, and nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError().
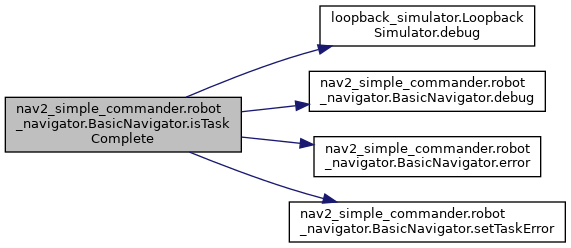
◆ isTaskComplete()
| bool nav2_simple_commander.robot_navigator.BasicNavigator.isTaskComplete | ( | self, | |
| RunningTask | task = RunningTask.NONE |
||
| ) |
Check if the task request of any type is complete yet.
Definition at line 711 of file robot_navigator.py.
References nav2_constrained_smoother::OptimizerParams.debug, loopback_simulator.LoopbackSimulator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, backup_tester.BackupTest.result_future, drive_tester.DriveTest.result_future, spin_tester.SpinTest.result_future, nav2_simple_commander.robot_navigator.BasicNavigator.route_result_future, nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError(), nav2_behaviors::ResultStatus.status, Cell.status, nav2_simple_commander.robot_navigator.BasicNavigator.status, and nav2_waypoint_follower::GoalStatus.status.
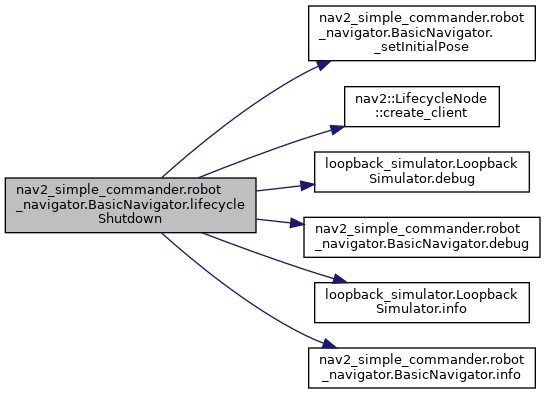
◆ lifecycleShutdown()
| None nav2_simple_commander.robot_navigator.BasicNavigator.lifecycleShutdown | ( | self | ) |
Shutdown nav2 lifecycle system.
Definition at line 1278 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._setInitialPose(), nav2::LifecycleNode.create_client(), nav2_constrained_smoother::OptimizerParams.debug, loopback_simulator.LoopbackSimulator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.feedback, loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), loopback_simulator.LoopbackSimulator.initial_pose, nav2_simple_commander.robot_navigator.BasicNavigator.initial_pose, tester_node.NavTester.initial_pose, tester_node.RouteTester.initial_pose, nav_through_poses_tester_error_msg_node.NavTester.initial_pose, nav_through_poses_tester_node.NavTester.initial_pose, nav_to_pose_tester_node.NavTester.initial_pose, nav2_simple_commander.robot_navigator.BasicNavigator.initial_pose_pub, tester_node.NavTester.initial_pose_pub, tester_node.RouteTester.initial_pose_pub, nav_through_poses_tester_error_msg_node.NavTester.initial_pose_pub, nav_through_poses_tester_node.NavTester.initial_pose_pub, nav_to_pose_tester_node.NavTester.initial_pose_pub, tester.WaypointFollowerTest.initial_pose_pub, nav2_simple_commander.robot_navigator.BasicNavigator.initial_pose_received, tester_node.NavTester.initial_pose_received, tester_node.RouteTester.initial_pose_received, nav_through_poses_tester_error_msg_node.NavTester.initial_pose_received, nav_through_poses_tester_node.NavTester.initial_pose_received, nav_to_pose_tester_node.NavTester.initial_pose_received, and tester.WaypointFollowerTest.initial_pose_received.
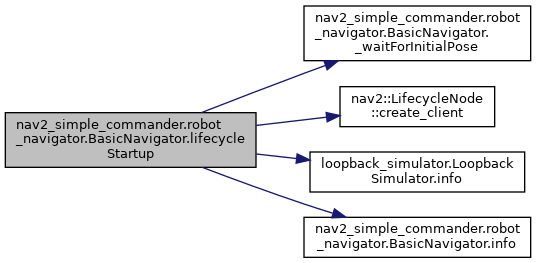
◆ lifecycleStartup()
| None nav2_simple_commander.robot_navigator.BasicNavigator.lifecycleStartup | ( | self | ) |
Startup nav2 lifecycle system.
Definition at line 1253 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._waitForInitialPose(), nav2::LifecycleNode.create_client(), loopback_simulator.LoopbackSimulator.info(), and nav2_simple_commander.robot_navigator.BasicNavigator.info().
◆ setInitialPose()
| None nav2_simple_commander.robot_navigator.BasicNavigator.setInitialPose | ( | self, | |
| PoseStamped | initial_pose | ||
| ) |
Set the initial pose to the localization system.
Definition at line 289 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._setInitialPose(), loopback_simulator.LoopbackSimulator.initial_pose, nav2_simple_commander.robot_navigator.BasicNavigator.initial_pose, tester_node.NavTester.initial_pose, tester_node.RouteTester.initial_pose, nav_through_poses_tester_error_msg_node.NavTester.initial_pose, nav_through_poses_tester_node.NavTester.initial_pose, nav_to_pose_tester_node.NavTester.initial_pose, nav2_simple_commander.robot_navigator.BasicNavigator.initial_pose_received, tester_node.NavTester.initial_pose_received, tester_node.RouteTester.initial_pose_received, nav_through_poses_tester_error_msg_node.NavTester.initial_pose_received, nav_through_poses_tester_node.NavTester.initial_pose_received, nav_to_pose_tester_node.NavTester.initial_pose_received, and tester.WaypointFollowerTest.initial_pose_received.

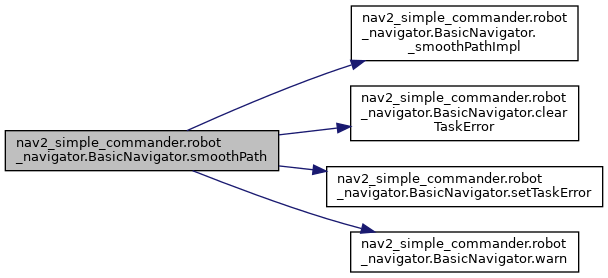
◆ smoothPath()
| Optional[Path] nav2_simple_commander.robot_navigator.BasicNavigator.smoothPath | ( | self, | |
| Path | path, | ||
| str | smoother_id = '', |
||
| float | max_duration = 2.0, |
||
| bool | check_for_collision = False |
||
| ) |
Send a `SmoothPath` action request.
Definition at line 1061 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._smoothPathImpl(), nav2_simple_commander.robot_navigator.BasicNavigator.clearTaskError(), nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError(), nav2_behaviors::ResultStatus.status, Cell.status, nav2_simple_commander.robot_navigator.BasicNavigator.status, nav2_waypoint_follower::GoalStatus.status, and nav2_simple_commander.robot_navigator.BasicNavigator.warn().
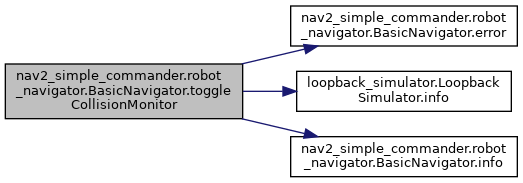
◆ toggleCollisionMonitor()
| None nav2_simple_commander.robot_navigator.BasicNavigator.toggleCollisionMonitor | ( | self, | |
| bool | enable | ||
| ) |
Toggle the collision monitor.
Definition at line 1238 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator.error(), loopback_simulator.LoopbackSimulator.info(), and nav2_simple_commander.robot_navigator.BasicNavigator.info().
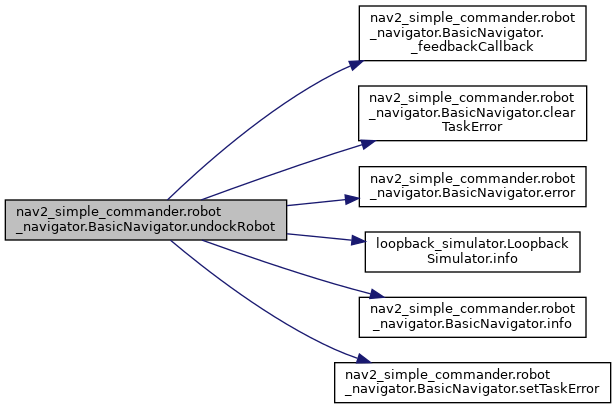
◆ undockRobot()
| Optional[RunningTask] nav2_simple_commander.robot_navigator.BasicNavigator.undockRobot | ( | self, | |
| str | dock_type = '' |
||
| ) |
Send a `UndockRobot` action request.
Definition at line 612 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._feedbackCallback(), nav2_simple_commander.robot_navigator.BasicNavigator.clearTaskError(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, backup_tester.BackupTest.goal_handle, drive_tester.DriveTest.goal_handle, spin_tester.SpinTest.goal_handle, tester.GpsWaypointFollowerTest.goal_handle, tester.WaypointFollowerTest.goal_handle, loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, backup_tester.BackupTest.result_future, drive_tester.DriveTest.result_future, spin_tester.SpinTest.result_future, and nav2_simple_commander.robot_navigator.BasicNavigator.setTaskError().
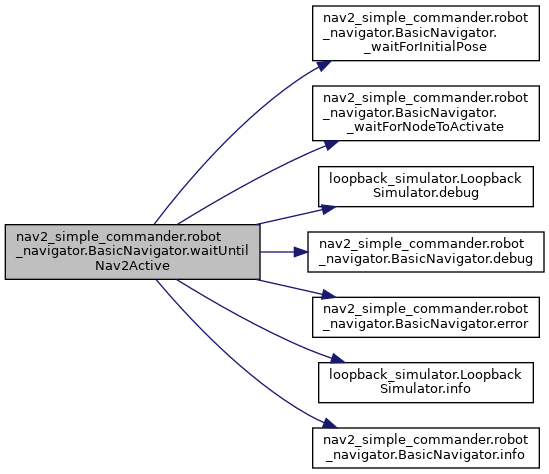
◆ waitUntilNav2Active()
| None nav2_simple_commander.robot_navigator.BasicNavigator.waitUntilNav2Active | ( | self, | |
| str | navigator = 'bt_navigator', |
||
| str | localizer = 'amcl' |
||
| ) |
Block until the full navigation system is up and running.
Definition at line 784 of file robot_navigator.py.
References nav2_simple_commander.robot_navigator.BasicNavigator._waitForInitialPose(), nav2_simple_commander.robot_navigator.BasicNavigator._waitForNodeToActivate(), nav2_constrained_smoother::OptimizerParams.debug, loopback_simulator.LoopbackSimulator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.debug(), nav2_simple_commander.robot_navigator.BasicNavigator.error(), nav2_simple_commander.robot_navigator.BasicNavigator.goal_handle, backup_tester.BackupTest.goal_handle, drive_tester.DriveTest.goal_handle, spin_tester.SpinTest.goal_handle, tester.GpsWaypointFollowerTest.goal_handle, tester.WaypointFollowerTest.goal_handle, loopback_simulator.LoopbackSimulator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.info(), nav2_simple_commander.robot_navigator.BasicNavigator.result_future, backup_tester.BackupTest.result_future, drive_tester.DriveTest.result_future, spin_tester.SpinTest.result_future, nav2_behaviors::ResultStatus.status, Cell.status, nav2_simple_commander.robot_navigator.BasicNavigator.status, and nav2_waypoint_follower::GoalStatus.status.
The documentation for this class was generated from the following file:
- nav2_simple_commander/nav2_simple_commander/robot_navigator.py