An action server implements a Navigation Route-Graph planner to compliment free-space planning in the Planner Server. More...
#include <nav2_route/include/nav2_route/route_server.hpp>
Public Types | |
| using | ComputeRoute = nav2_msgs::action::ComputeRoute |
| using | ComputeRouteGoal = ComputeRoute::Goal |
| using | ComputeRouteResult = ComputeRoute::Result |
| using | ComputeRouteServer = nav2_util::SimpleActionServer< ComputeRoute > |
| using | ComputeAndTrackRoute = nav2_msgs::action::ComputeAndTrackRoute |
| using | ComputeAndTrackRouteGoal = ComputeAndTrackRoute::Goal |
| using | ComputeAndTrackRouteFeedback = ComputeAndTrackRoute::Feedback |
| using | ComputeAndTrackRouteResult = ComputeAndTrackRoute::Result |
| using | ComputeAndTrackRouteServer = nav2_util::SimpleActionServer< ComputeAndTrackRoute > |
Public Member Functions | |
| RouteServer (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A constructor for nav2_route::RouteServer. More... | |
| ~RouteServer ()=default | |
| A destructor for nav2_route::RouteServer. | |
 Public Member Functions inherited from nav2_util::LifecycleNode Public Member Functions inherited from nav2_util::LifecycleNode | |
| LifecycleNode (const std::string &node_name, const std::string &ns="", const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A lifecycle node constructor. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has no integer or floating point range constraints. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const floating_point_range fp_range, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has a floating point range constraint. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const integer_range int_range, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has an integer range constraint. More... | |
| std::shared_ptr< nav2_util::LifecycleNode > | shared_from_this () |
| Get a shared pointer of this. | |
| nav2_util::CallbackReturn | on_error (const rclcpp_lifecycle::State &) |
| Abstracted on_error state transition callback, since unimplemented as of 2020 in the managed ROS2 node state machine. More... | |
| virtual void | on_rcl_preshutdown () |
| Perform preshutdown activities before our Context is shutdown. Note that this is related to our Context's shutdown sequence, not the lifecycle node state machine. | |
| void | createBond () |
| Create bond connection to lifecycle manager. | |
| void | destroyBond () |
| Destroy bond connection to lifecycle manager. | |
Protected Member Functions | |
| nav2_util::CallbackReturn | on_configure (const rclcpp_lifecycle::State &state) override |
| Configure member variables and initializes planner. More... | |
| nav2_util::CallbackReturn | on_activate (const rclcpp_lifecycle::State &state) override |
| Activate member variables. More... | |
| nav2_util::CallbackReturn | on_deactivate (const rclcpp_lifecycle::State &state) override |
| Deactivate member variables. More... | |
| nav2_util::CallbackReturn | on_cleanup (const rclcpp_lifecycle::State &state) override |
| Reset member variables. More... | |
| nav2_util::CallbackReturn | on_shutdown (const rclcpp_lifecycle::State &state) override |
| Called when in shutdown state. More... | |
| void | computeRoute () |
| Main route action server callbacks for computing and tracking a route. | |
| void | computeAndTrackRoute () |
| template<typename GoalT > | |
| Route | findRoute (const std::shared_ptr< const GoalT > goal, ReroutingState &rerouting_info=ReroutingState()) |
| Abstract method combining finding the starting/ending nodes and the route planner to find the Node locations of interest and route to the goal. More... | |
| template<typename ActionT > | |
| void | processRouteRequest (std::shared_ptr< nav2_util::SimpleActionServer< ActionT >> &action_server) |
| Main processing called by both action server callbacks to centralize the great deal of shared code between them. | |
| rclcpp::Duration | findPlanningDuration (const rclcpp::Time &start_time) |
| Find the planning duration of the request and log warnings. More... | |
| template<typename ActionT > | |
| bool | isRequestValid (std::shared_ptr< nav2_util::SimpleActionServer< ActionT >> &action_server) |
| Find the routing request is valid (action server OK and not cancelled) More... | |
| void | populateActionResult (std::shared_ptr< ComputeRoute::Result > result, const Route &route, const nav_msgs::msg::Path &path, const rclcpp::Duration &planning_duration) |
| Populate result for compute route action. More... | |
| void | populateActionResult (std::shared_ptr< ComputeAndTrackRoute::Result >, const Route &, const nav_msgs::msg::Path &, const rclcpp::Duration &) |
| Populate result for compute and track route action. More... | |
| void | setRouteGraph (const std::shared_ptr< rmw_request_id_t >, const std::shared_ptr< nav2_msgs::srv::SetRouteGraph::Request > request, std::shared_ptr< nav2_msgs::srv::SetRouteGraph::Response > response) |
| The service callback to set a new route graph. More... | |
| template<typename GoalT > | |
| void | exceptionWarning (const std::shared_ptr< const GoalT > goal, const std::exception &ex) |
| Log exception warnings, templated by action message type. More... | |
| Protected Member Functions inherited from nav2_util::LifecycleNode | |
| void | printLifecycleNodeNotification () |
| Print notifications for lifecycle node. | |
| void | register_rcl_preshutdown_callback () |
| void | runCleanups () |
Protected Attributes | |
| std::shared_ptr< ComputeRouteServer > | compute_route_server_ |
| std::shared_ptr< ComputeAndTrackRouteServer > | compute_and_track_route_server_ |
| std::shared_ptr< tf2_ros::Buffer > | tf_ |
| std::shared_ptr< tf2_ros::TransformListener > | transform_listener_ |
| rclcpp_lifecycle::LifecyclePublisher< visualization_msgs::msg::MarkerArray >::SharedPtr | graph_vis_publisher_ |
| rclcpp::Service< nav2_msgs::srv::SetRouteGraph >::SharedPtr | set_graph_service_ |
| std::shared_ptr< GraphLoader > | graph_loader_ |
| std::shared_ptr< RoutePlanner > | route_planner_ |
| std::shared_ptr< RouteTracker > | route_tracker_ |
| std::shared_ptr< PathConverter > | path_converter_ |
| std::shared_ptr< GoalIntentExtractor > | goal_intent_extractor_ |
| std::shared_ptr< nav2_costmap_2d::CostmapSubscriber > | costmap_subscriber_ |
| Graph | graph_ |
| GraphToIDMap | id_to_graph_map_ |
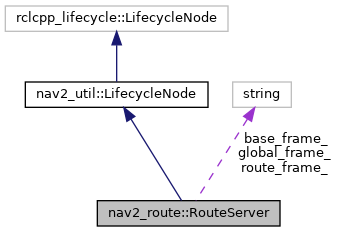
| std::string | route_frame_ |
| std::string | global_frame_ |
| std::string | base_frame_ |
| double | max_planning_time_ |
| Protected Attributes inherited from nav2_util::LifecycleNode | |
| std::unique_ptr< rclcpp::PreShutdownCallbackHandle > | rcl_preshutdown_cb_handle_ {nullptr} |
| std::unique_ptr< bond::Bond > | bond_ {nullptr} |
Detailed Description
An action server implements a Navigation Route-Graph planner to compliment free-space planning in the Planner Server.
Definition at line 54 of file route_server.hpp.
Constructor & Destructor Documentation
◆ RouteServer()
|
explicit |
A constructor for nav2_route::RouteServer.
- Parameters
-
options Additional options to control creation of the node.
Definition at line 24 of file route_server.cpp.
Member Function Documentation
◆ exceptionWarning()
|
protected |
Log exception warnings, templated by action message type.
- Parameters
-
goal Goal that failed exception Exception message
Definition at line 375 of file route_server.cpp.
◆ findPlanningDuration()
|
protected |
Find the planning duration of the request and log warnings.
- Parameters
-
start_time Start of planning time
- Returns
- Duration of planning time
Definition at line 160 of file route_server.cpp.
◆ findRoute()
|
protected |
Abstract method combining finding the starting/ending nodes and the route planner to find the Node locations of interest and route to the goal.
- Parameters
-
goal The request goal information blocked_ids The IDs of blocked graphs / edges updated_start_id The nodeID of an updated starting point when tracking a route that corresponds to the next point to route to from to continue progress
- Returns
- A route of the request
Definition at line 219 of file route_server.cpp.
Referenced by processRouteRequest().

◆ isRequestValid()
|
protected |
Find the routing request is valid (action server OK and not cancelled)
- Parameters
-
action_server Actions server to check
- Returns
- if the request is valid
Definition at line 175 of file route_server.cpp.
◆ on_activate()
|
overrideprotected |
Activate member variables.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 111 of file route_server.cpp.
References nav2_util::LifecycleNode::createBond().

◆ on_cleanup()
|
overrideprotected |
Reset member variables.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 134 of file route_server.cpp.
◆ on_configure()
|
overrideprotected |
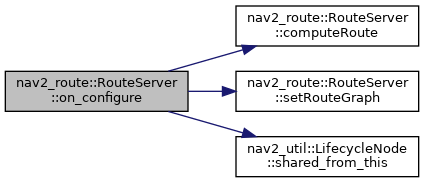
Configure member variables and initializes planner.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 29 of file route_server.cpp.
References computeRoute(), setRouteGraph(), and nav2_util::LifecycleNode::shared_from_this().
◆ on_deactivate()
|
overrideprotected |
Deactivate member variables.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 123 of file route_server.cpp.
References nav2_util::LifecycleNode::destroyBond().

◆ on_shutdown()
|
overrideprotected |
Called when in shutdown state.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 153 of file route_server.cpp.
◆ populateActionResult() [1/2]
|
protected |
Populate result for compute and track route action.
- Parameters
-
result Result to populate route Route to use to populate result path Path to use to populate result planning_duration Time to create a valid route
Definition at line 209 of file route_server.cpp.
◆ populateActionResult() [2/2]
|
protected |
Populate result for compute route action.
- Parameters
-
result Result to populate route Route to use to populate result path Path to use to populate result planning_duration Time to create a valid route
Definition at line 198 of file route_server.cpp.
◆ setRouteGraph()
|
protected |
The service callback to set a new route graph.
- Parameters
-
request_header to the service request to the service response from the service
Definition at line 350 of file route_server.cpp.
Referenced by on_configure().

The documentation for this class was generated from the following files:
- nav2_route/include/nav2_route/route_server.hpp
- nav2_route/src/route_server.cpp