An optimal planner to compute a route from a start to a goal in an arbitrary graph. More...
#include <nav2_route/include/nav2_route/route_planner.hpp>
Public Member Functions | |
| RoutePlanner ()=default | |
| A constructor for nav2_route::RoutePlanner. | |
| virtual | ~RoutePlanner ()=default |
| A destructor for nav2_route::RoutePlanner. | |
| void | configure (rclcpp_lifecycle::LifecycleNode::SharedPtr node, const std::shared_ptr< tf2_ros::Buffer > tf_buffer, const std::shared_ptr< nav2_costmap_2d::CostmapSubscriber > costmap_subscriber) |
| Configure the route planner, get parameters. More... | |
| virtual Route | findRoute (Graph &graph, unsigned int start_index, unsigned int goal_index, const std::vector< unsigned int > &blocked_ids, const RouteRequest &route_request) |
| Find the route from start to goal on the graph. More... | |
Protected Member Functions | |
| void | resetSearchStates (Graph &graph) |
| Reset the search state of the graph nodes. More... | |
| void | findShortestGraphTraversal (Graph &graph, const NodePtr start_node, const NodePtr goal_node, const std::vector< unsigned int > &blocked_ids, const RouteRequest &route_request) |
| Dikstra's algorithm search on the graph. More... | |
| bool | getTraversalCost (const EdgePtr edge, float &score, const std::vector< unsigned int > &blocked_ids, const RouteRequest &route_request) |
| Gets the traversal cost for an edge using edge scorers. More... | |
| NodeElement | getNextNode () |
| Gets the next node in the priority queue for search. More... | |
| void | addNode (const float cost, const NodePtr node) |
| Adds a node to the priority queue for search. More... | |
| EdgeVector & | getEdges (const NodePtr node) |
| Gets the edges from a given node. More... | |
| void | clearQueue () |
| Clears the priority queue. | |
| bool | isGoal (const NodePtr node) |
| Checks if a given node is the goal node. More... | |
| bool | isStart (const NodePtr node) |
| Checks if a given node is the start node. More... | |
| nav2_route::EdgeType | classifyEdge (const EdgePtr edge) |
| Checks edge is a start or end edge. More... | |
Protected Attributes | |
| int | max_iterations_ {0} |
| unsigned int | start_id_ {0} |
| unsigned int | goal_id_ {0} |
| NodeQueue | queue_ |
| std::unique_ptr< EdgeScorer > | edge_scorer_ |
| std::shared_ptr< tf2_ros::Buffer > | tf_buffer_ |
Detailed Description
An optimal planner to compute a route from a start to a goal in an arbitrary graph.
Definition at line 40 of file route_planner.hpp.
Member Function Documentation
◆ addNode()
|
inlineprotected |
Adds a node to the priority queue for search.
- Parameters
-
cost Priority level node Node pointer to insert
Definition at line 182 of file route_planner.cpp.
Referenced by findShortestGraphTraversal().

◆ classifyEdge()
|
protected |
Checks edge is a start or end edge.
- Parameters
-
edge Edge to check
- Returns
- EdgeType identifying whether the edge is start, end or none
Definition at line 208 of file route_planner.cpp.
References isStart().
Referenced by getTraversalCost().


◆ configure()
| void nav2_route::RoutePlanner::configure | ( | rclcpp_lifecycle::LifecycleNode::SharedPtr | node, |
| const std::shared_ptr< tf2_ros::Buffer > | tf_buffer, | ||
| const std::shared_ptr< nav2_costmap_2d::CostmapSubscriber > | costmap_subscriber | ||
| ) |
Configure the route planner, get parameters.
- Parameters
-
node Node object to get parametersfrom tf_buffer TF buffer to use for transformations costmap_subscriber Costmap subscriber to use for blocked nodes
Definition at line 27 of file route_planner.cpp.
◆ findRoute()
|
virtual |
Find the route from start to goal on the graph.
- Parameters
-
graph Graph to search start Start index in the graph of the start node goal Goal index in the graph of the goal node blocked_ids A set of blocked node and edge IDs not to traverse
- Returns
- Route object containing the navigation graph route
Definition at line 43 of file route_planner.cpp.
References findShortestGraphTraversal().
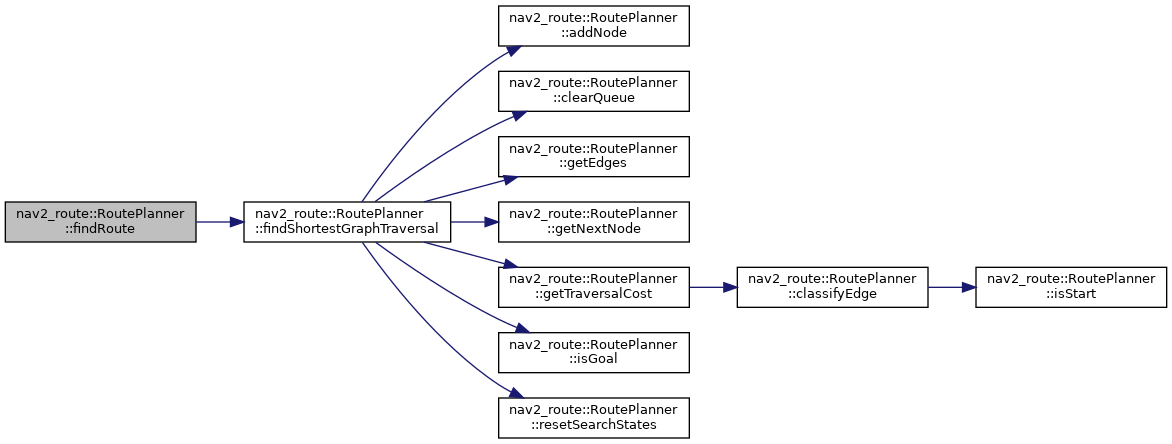
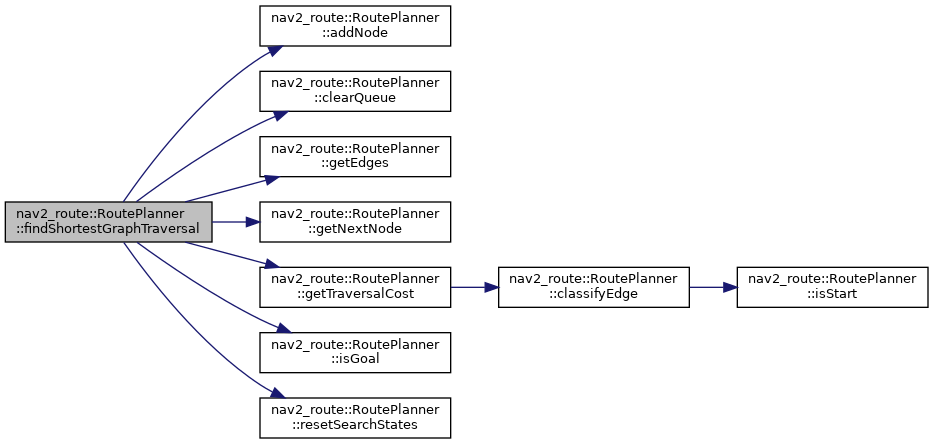
◆ findShortestGraphTraversal()
|
protected |
Dikstra's algorithm search on the graph.
- Parameters
-
graph Graph to search start Start Node pointer goal Goal node pointer blocked_ids A set of blocked node and edge IDs not to traverse
Definition at line 86 of file route_planner.cpp.
References addNode(), clearQueue(), getEdges(), getNextNode(), getTraversalCost(), isGoal(), and resetSearchStates().
Referenced by findRoute().

◆ getEdges()
|
inlineprotected |
Gets the edges from a given node.
- Parameters
-
node Node pointer to check
- Returns
- A vector of edges that the node contains
Definition at line 187 of file route_planner.cpp.
Referenced by findShortestGraphTraversal().

◆ getNextNode()
|
inlineprotected |
Gets the next node in the priority queue for search.
- Returns
- Next node pointer in queue with cost
Definition at line 175 of file route_planner.cpp.
Referenced by findShortestGraphTraversal().

◆ getTraversalCost()
|
inlineprotected |
Gets the traversal cost for an edge using edge scorers.
- Parameters
-
edge Edge pointer to find traversal cost for travel cost blocked_ids A set of blocked node and edge IDs not to traverse
- Returns
- if this edge is valid for search
Definition at line 148 of file route_planner.cpp.
References classifyEdge().
Referenced by findShortestGraphTraversal().


◆ isGoal()
|
inlineprotected |
Checks if a given node is the goal node.
- Parameters
-
node Node to check
- Returns
- bool If this node is the goal
Definition at line 198 of file route_planner.cpp.
Referenced by findShortestGraphTraversal().

◆ isStart()
|
inlineprotected |
Checks if a given node is the start node.
- Parameters
-
node Node to check
- Returns
- bool If this node is the start
Definition at line 203 of file route_planner.cpp.
Referenced by classifyEdge().

◆ resetSearchStates()
|
inlineprotected |
Reset the search state of the graph nodes.
- Parameters
-
graph Graph to reset
Definition at line 77 of file route_planner.cpp.
Referenced by findShortestGraphTraversal().

The documentation for this class was generated from the following files:
- nav2_route/include/nav2_route/route_planner.hpp
- nav2_route/src/route_planner.cpp