An A* implementation for planning in a costmap. Templated based on the Node type. More...
#include <nav2_smac_planner/include/nav2_smac_planner/a_star.hpp>
Classes | |
| struct | NodeComparator |
Public Types | |
| typedef NodeT * | NodePtr |
| typedef robin_hood::unordered_node_map< unsigned int, NodeT > | Graph |
| typedef std::vector< NodePtr > | NodeVector |
| typedef std::pair< float, NodeBasic< NodeT > > | NodeElement |
| typedef NodeT::Coordinates | Coordinates |
| typedef NodeT::CoordinateVector | CoordinateVector |
| typedef NodeVector::iterator | NeighborIterator |
| typedef std::function< bool(const unsigned int &, NodeT *&)> | NodeGetter |
| typedef std::priority_queue< NodeElement, std::vector< NodeElement >, NodeComparator > | NodeQueue |
Public Member Functions | |
| AStarAlgorithm (const MotionModel &motion_model, const SearchInfo &search_info) | |
| A constructor for nav2_smac_planner::AStarAlgorithm. | |
| ~AStarAlgorithm () | |
| A destructor for nav2_smac_planner::AStarAlgorithm. | |
| void | initialize (const bool &allow_unknown, int &max_iterations, const int &max_on_approach_iterations, const double &max_planning_time, const float &lookup_table_size, const unsigned int &dim_3_size) |
| Initialization of the planner with defaults. More... | |
| bool | createPath (CoordinateVector &path, int &num_iterations, const float &tolerance) |
| Creating path from given costmap, start, and goal. More... | |
| void | setCollisionChecker (GridCollisionChecker *collision_checker) |
| Sets the collision checker to use. More... | |
| void | setGoal (const unsigned int &mx, const unsigned int &my, const unsigned int &dim_3) |
| Set the goal for planning, as a node index. More... | |
| void | setStart (const unsigned int &mx, const unsigned int &my, const unsigned int &dim_3) |
| Set the starting pose for planning, as a node index. More... | |
| int & | getMaxIterations () |
| Get maximum number of iterations to plan. More... | |
| NodePtr & | getStart () |
| Get pointer reference to starting node. More... | |
| NodePtr & | getGoal () |
| Get pointer reference to goal node. More... | |
| int & | getOnApproachMaxIterations () |
| Get maximum number of on-approach iterations after within threshold. More... | |
| float & | getToleranceHeuristic () |
| Get tolerance, in node nodes. More... | |
| unsigned int & | getSizeX () |
| Get size of graph in X. More... | |
| unsigned int & | getSizeY () |
| Get size of graph in Y. More... | |
| unsigned int & | getSizeDim3 () |
| Get number of angle quantization bins (SE2) or Z coordinate (XYZ) More... | |
| void | initialize (const bool &allow_unknown, int &max_iterations, const int &max_on_approach_iterations, const double &max_planning_time, const float &, const unsigned int &dim_3_size) |
| void | setStart (const unsigned int &mx, const unsigned int &my, const unsigned int &dim_3) |
| void | setGoal (const unsigned int &mx, const unsigned int &my, const unsigned int &dim_3) |
Protected Member Functions | |
| NodePtr | getNextNode () |
| Get pointer to next goal in open set. More... | |
| void | addNode (const float &cost, NodePtr &node) |
| Add a node to the open set. More... | |
| NodePtr | addToGraph (const unsigned int &index) |
| Adds node to graph. More... | |
| bool | isGoal (NodePtr &node) |
| Check if this node is the goal node. More... | |
| float | getHeuristicCost (const NodePtr &node) |
| Get cost of heuristic of node. More... | |
| bool | areInputsValid () |
| Check if inputs to planner are valid. More... | |
| void | clearQueue () |
| Clear hueristic queue of nodes to search. | |
| void | clearGraph () |
| Clear graph of nodes searched. | |
Protected Attributes | |
| int | _timing_interval = 5000 |
| bool | _traverse_unknown |
| bool | _is_initialized |
| int | _max_iterations |
| int | _max_on_approach_iterations |
| double | _max_planning_time |
| float | _tolerance |
| unsigned int | _x_size |
| unsigned int | _y_size |
| unsigned int | _dim3_size |
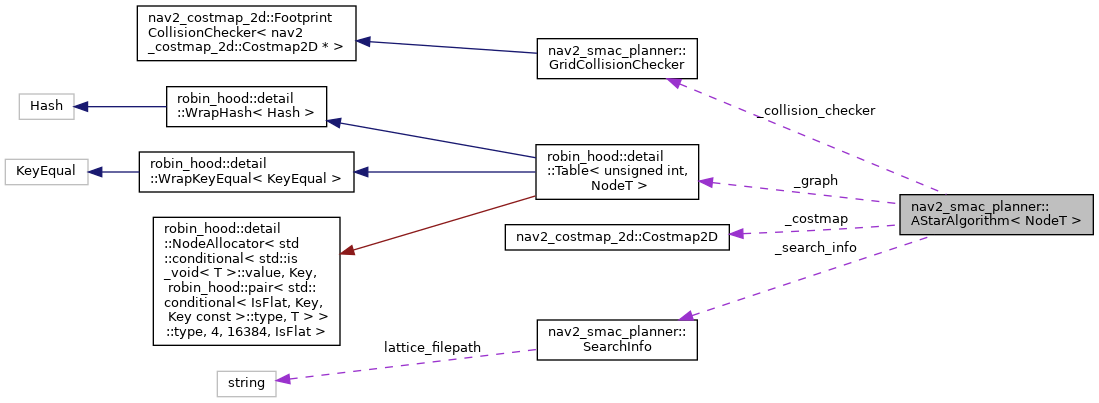
| SearchInfo | _search_info |
| Coordinates | _goal_coordinates |
| NodePtr | _start |
| NodePtr | _goal |
| Graph | _graph |
| NodeQueue | _queue |
| MotionModel | _motion_model |
| NodeHeuristicPair | _best_heuristic_node |
| GridCollisionChecker * | _collision_checker |
| nav2_costmap_2d::Costmap2D * | _costmap |
| std::unique_ptr< AnalyticExpansion< NodeT > > | _expander |
Detailed Description
template<typename NodeT>
class nav2_smac_planner::AStarAlgorithm< NodeT >
An A* implementation for planning in a costmap. Templated based on the Node type.
Definition at line 46 of file a_star.hpp.
Member Function Documentation
◆ addNode()
|
inlineprotected |
Add a node to the open set.
- Parameters
-
cost The cost to sort into the open set of the node node Node pointer reference to add to open set
Definition at line 369 of file a_star.cpp.
References nav2_smac_planner::NodeBasic< NodeT >::populateSearchNode().

◆ addToGraph()
|
inlineprotected |
◆ areInputsValid()
|
inlineprotected |
◆ createPath()
| bool nav2_smac_planner::AStarAlgorithm< NodeT >::createPath | ( | CoordinateVector & | path, |
| int & | num_iterations, | ||
| const float & | tolerance | ||
| ) |
Creating path from given costmap, start, and goal.
- Parameters
-
path Reference to a vector of indicies of generated path num_iterations Reference to number of iterations to create plan tolerance Reference to tolerance in costmap nodes
- Returns
- if plan was successful
Definition at line 226 of file a_star.cpp.
◆ getGoal()
| AStarAlgorithm< NodeT >::NodePtr & nav2_smac_planner::AStarAlgorithm< NodeT >::getGoal |
Get pointer reference to goal node.
- Returns
- Node pointer reference to goal node
Definition at line 354 of file a_star.cpp.
◆ getHeuristicCost()
|
inlineprotected |
Get cost of heuristic of node.
- Parameters
-
node Node pointer to get heuristic for
- Returns
- Heuristic cost for node
Definition at line 377 of file a_star.cpp.
◆ getMaxIterations()
| int & nav2_smac_planner::AStarAlgorithm< NodeT >::getMaxIterations |
Get maximum number of iterations to plan.
- Returns
- Reference to Maximum iterations parameter
Definition at line 407 of file a_star.cpp.
◆ getNextNode()
|
inlineprotected |
Get pointer to next goal in open set.
- Returns
- Node pointer reference to next heuristically scored node
Definition at line 360 of file a_star.cpp.
References nav2_smac_planner::NodeBasic< NodeT >::processSearchNode().

◆ getOnApproachMaxIterations()
| int & nav2_smac_planner::AStarAlgorithm< NodeT >::getOnApproachMaxIterations |
Get maximum number of on-approach iterations after within threshold.
- Returns
- Reference to Maximum on-appraoch iterations parameter
Definition at line 413 of file a_star.cpp.
◆ getSizeDim3()
| unsigned int & nav2_smac_planner::AStarAlgorithm< NodeT >::getSizeDim3 |
Get number of angle quantization bins (SE2) or Z coordinate (XYZ)
- Returns
- Number of angle bins / Z dimension
Definition at line 437 of file a_star.cpp.
◆ getSizeX()
| unsigned int & nav2_smac_planner::AStarAlgorithm< NodeT >::getSizeX |
◆ getSizeY()
| unsigned int & nav2_smac_planner::AStarAlgorithm< NodeT >::getSizeY |
◆ getStart()
| AStarAlgorithm< NodeT >::NodePtr & nav2_smac_planner::AStarAlgorithm< NodeT >::getStart |
Get pointer reference to starting node.
- Returns
- Node pointer reference to starting node
Definition at line 348 of file a_star.cpp.
◆ getToleranceHeuristic()
| float & nav2_smac_planner::AStarAlgorithm< NodeT >::getToleranceHeuristic |
Get tolerance, in node nodes.
- Returns
- Reference to tolerance parameter
Definition at line 419 of file a_star.cpp.
◆ initialize()
| void nav2_smac_planner::AStarAlgorithm< NodeT >::initialize | ( | const bool & | allow_unknown, |
| int & | max_iterations, | ||
| const int & | max_on_approach_iterations, | ||
| const double & | max_planning_time, | ||
| const float & | lookup_table_size, | ||
| const unsigned int & | dim_3_size | ||
| ) |
Initialization of the planner with defaults.
- Parameters
-
allow_unknown Allow search in unknown space, good for navigation while mapping max_iterations Maximum number of iterations to use while expanding search max_on_approach_iterations Maximum number of iterations before returning a valid path once within thresholds to refine path comes at more compute time but smoother paths. max_planning_time Maximum time (in seconds) to wait for a plan, createPath returns false after this timeout
Definition at line 59 of file a_star.cpp.
◆ isGoal()
|
inlineprotected |
Check if this node is the goal node.
- Parameters
-
node Node pointer to check if its the goal node
- Returns
- if node is goal
Definition at line 342 of file a_star.cpp.
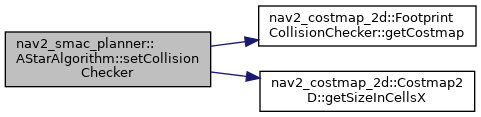
◆ setCollisionChecker()
| void nav2_smac_planner::AStarAlgorithm< NodeT >::setCollisionChecker | ( | GridCollisionChecker * | collision_checker | ) |
Sets the collision checker to use.
- Parameters
-
collision_checker Collision checker to use for checking state validity
Definition at line 103 of file a_star.cpp.
References nav2_costmap_2d::FootprintCollisionChecker< CostmapT >::getCostmap(), and nav2_costmap_2d::Costmap2D::getSizeInCellsX().
◆ setGoal()
| void nav2_smac_planner::AStarAlgorithm< NodeT >::setGoal | ( | const unsigned int & | mx, |
| const unsigned int & | my, | ||
| const unsigned int & | dim_3 | ||
| ) |
Set the goal for planning, as a node index.
- Parameters
-
mx The node X index of the goal my The node Y index of the goal dim_3 The node dim_3 index of the goal
Definition at line 173 of file a_star.cpp.
◆ setStart()
| void nav2_smac_planner::AStarAlgorithm< NodeT >::setStart | ( | const unsigned int & | mx, |
| const unsigned int & | my, | ||
| const unsigned int & | dim_3 | ||
| ) |
Set the starting pose for planning, as a node index.
- Parameters
-
mx The node X index of the goal my The node Y index of the goal dim_3 The node dim_3 index of the goal
Definition at line 145 of file a_star.cpp.
The documentation for this class was generated from the following files:
- nav2_smac_planner/include/nav2_smac_planner/a_star.hpp
- nav2_smac_planner/src/a_star.cpp