A costmap grid collision checker. More...
#include <nav2_smac_planner/include/nav2_smac_planner/collision_checker.hpp>
Public Member Functions | |
| GridCollisionChecker (nav2_costmap_2d::Costmap2D *costmap, unsigned int num_quantizations, rclcpp_lifecycle::LifecycleNode::SharedPtr node) | |
| A constructor for nav2_smac_planner::GridCollisionChecker for use when regular bin intervals are appropriate. More... | |
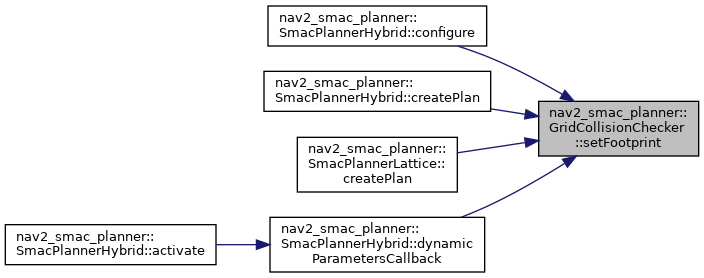
| void | setFootprint (const nav2_costmap_2d::Footprint &footprint, const bool &radius, const double &possible_inscribed_cost) |
| A constructor for nav2_smac_planner::GridCollisionChecker for use when irregular bin intervals are appropriate. More... | |
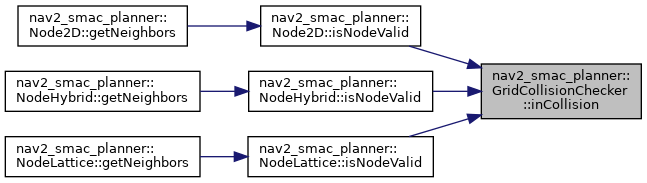
| bool | inCollision (const float &x, const float &y, const float &theta, const bool &traverse_unknown) |
| Check if in collision with costmap and footprint at pose. More... | |
| bool | inCollision (const unsigned int &i, const bool &traverse_unknown) |
| Check if in collision with costmap and footprint at pose. More... | |
| float | getCost () |
| Get cost at footprint pose in costmap. More... | |
| std::vector< float > & | getPrecomputedAngles () |
| Get the angles of the precomputed footprint orientations. More... | |
 Public Member Functions inherited from nav2_costmap_2d::FootprintCollisionChecker< nav2_costmap_2d::Costmap2D * > Public Member Functions inherited from nav2_costmap_2d::FootprintCollisionChecker< nav2_costmap_2d::Costmap2D * > | |
| FootprintCollisionChecker () | |
| A constructor. | |
| FootprintCollisionChecker (nav2_costmap_2d::Costmap2D * costmap) | |
| A constructor. | |
| double | footprintCost (const Footprint footprint) |
| Find the footprint cost in oriented footprint. | |
| double | footprintCostAtPose (double x, double y, double theta, const Footprint footprint) |
| Find the footprint cost a a post with an unoriented footprint. | |
| double | lineCost (int x0, int x1, int y0, int y1) const |
| Get the cost for a line segment. | |
| bool | worldToMap (double wx, double wy, unsigned int &mx, unsigned int &my) |
| Get the map coordinates from a world point. | |
| double | pointCost (int x, int y) const |
| Get the cost of a point. | |
| void | setCostmap (nav2_costmap_2d::Costmap2D * costmap) |
| Set the current costmap object to use for collision detection. | |
| nav2_costmap_2d::Costmap2D * | getCostmap () |
| Get the current costmap object. | |
Protected Attributes | |
| std::vector< nav2_costmap_2d::Footprint > | oriented_footprints_ |
| nav2_costmap_2d::Footprint | unoriented_footprint_ |
| double | footprint_cost_ |
| bool | footprint_is_radius_ |
| std::vector< float > | angles_ |
| double | possible_inscribed_cost_ {-1} |
| rclcpp::Logger | logger_ {rclcpp::get_logger("SmacPlannerCollisionChecker")} |
| rclcpp::Clock::SharedPtr | clock_ |
| Protected Attributes inherited from nav2_costmap_2d::FootprintCollisionChecker< nav2_costmap_2d::Costmap2D * > | |
| nav2_costmap_2d::Costmap2D * | costmap_ |
Detailed Description
A costmap grid collision checker.
Definition at line 29 of file collision_checker.hpp.
Constructor & Destructor Documentation
◆ GridCollisionChecker()
| nav2_smac_planner::GridCollisionChecker::GridCollisionChecker | ( | nav2_costmap_2d::Costmap2D * | costmap, |
| unsigned int | num_quantizations, | ||
| rclcpp_lifecycle::LifecycleNode::SharedPtr | node | ||
| ) |
A constructor for nav2_smac_planner::GridCollisionChecker for use when regular bin intervals are appropriate.
- Parameters
-
costmap The costmap to collision check against num_quantizations The number of quantizations to precompute footprint node Node to extract clock and logger from orientations for to speed up collision checking
Definition at line 20 of file collision_checker.cpp.
Member Function Documentation
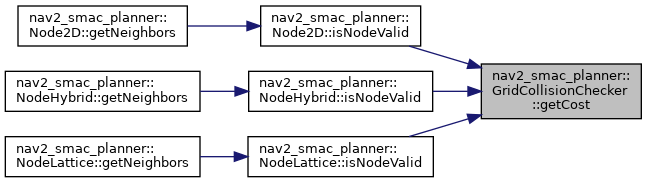
◆ getCost()
| float nav2_smac_planner::GridCollisionChecker::getCost | ( | ) |
Get cost at footprint pose in costmap.
- Returns
- the cost at the pose in costmap
Definition at line 185 of file collision_checker.cpp.
Referenced by nav2_smac_planner::Node2D::isNodeValid(), nav2_smac_planner::NodeHybrid::isNodeValid(), and nav2_smac_planner::NodeLattice::isNodeValid().
◆ getPrecomputedAngles()
|
inline |
Get the angles of the precomputed footprint orientations.
- Returns
- the ordered vector of angles corresponding to footprints
Definition at line 101 of file collision_checker.hpp.
Referenced by nav2_smac_planner::NodeLattice::isNodeValid().

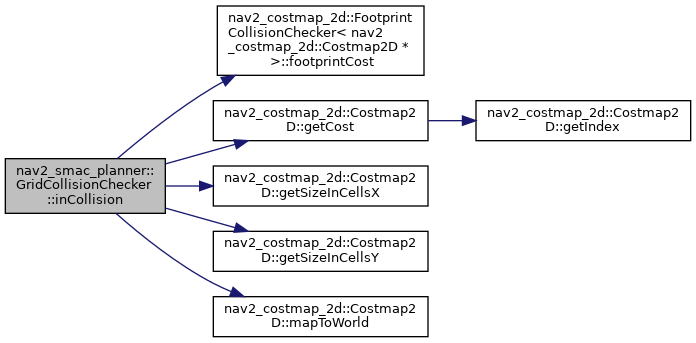
◆ inCollision() [1/2]
| bool nav2_smac_planner::GridCollisionChecker::inCollision | ( | const float & | x, |
| const float & | y, | ||
| const float & | theta, | ||
| const bool & | traverse_unknown | ||
| ) |
Check if in collision with costmap and footprint at pose.
- Parameters
-
x X coordinate of pose to check against y Y coordinate of pose to check against theta Angle bin number of pose to check against (NOT radians) traverse_unknown Whether or not to traverse in unknown space
- Returns
- boolean if in collision or not.
Definition at line 90 of file collision_checker.cpp.
References nav2_costmap_2d::FootprintCollisionChecker< nav2_costmap_2d::Costmap2D * >::footprintCost(), nav2_costmap_2d::Costmap2D::getCost(), nav2_costmap_2d::Costmap2D::getSizeInCellsX(), nav2_costmap_2d::Costmap2D::getSizeInCellsY(), and nav2_costmap_2d::Costmap2D::mapToWorld().
Referenced by nav2_smac_planner::Node2D::isNodeValid(), nav2_smac_planner::NodeHybrid::isNodeValid(), and nav2_smac_planner::NodeLattice::isNodeValid().
◆ inCollision() [2/2]
| bool nav2_smac_planner::GridCollisionChecker::inCollision | ( | const unsigned int & | i, |
| const bool & | traverse_unknown | ||
| ) |
Check if in collision with costmap and footprint at pose.
- Parameters
-
i Index to search collision status of traverse_unknown Whether or not to traverse in unknown space
- Returns
- boolean if in collision or not.
Definition at line 172 of file collision_checker.cpp.
References nav2_costmap_2d::Costmap2D::getCost().

◆ setFootprint()
| void nav2_smac_planner::GridCollisionChecker::setFootprint | ( | const nav2_costmap_2d::Footprint & | footprint, |
| const bool & | radius, | ||
| const double & | possible_inscribed_cost | ||
| ) |
A constructor for nav2_smac_planner::GridCollisionChecker for use when irregular bin intervals are appropriate.
- Parameters
-
costmap The costmap to collision check against angles The vector of possible angle bins to precompute for orientations for to speed up collision checking, in radians
Set the footprint to use with collision checker
- Parameters
-
footprint The footprint to collision check against radius Whether or not the footprint is a circle and use radius collision checking
Definition at line 47 of file collision_checker.cpp.
Referenced by nav2_smac_planner::SmacPlannerHybrid::configure(), nav2_smac_planner::SmacPlannerHybrid::createPlan(), nav2_smac_planner::SmacPlannerLattice::createPlan(), and nav2_smac_planner::SmacPlannerHybrid::dynamicParametersCallback().
The documentation for this class was generated from the following files:
- nav2_smac_planner/include/nav2_smac_planner/collision_checker.hpp
- nav2_smac_planner/src/collision_checker.cpp