Subscription implementation, templated on the type of message this subscription receives. More...
#include <rclcpp/subscription.hpp>
Public Types | |
| using | SubscribedType = SubscribedT |
| using | ROSMessageType = ROSMessageT |
| using | MessageMemoryStrategyType = MessageMemoryStrategyT |
| using | SubscribedTypeAllocatorTraits = allocator::AllocRebind< SubscribedType, AllocatorT > |
| using | SubscribedTypeAllocator = typename SubscribedTypeAllocatorTraits::allocator_type |
| using | SubscribedTypeDeleter = allocator::Deleter< SubscribedTypeAllocator, SubscribedType > |
| using | ROSMessageTypeAllocatorTraits = allocator::AllocRebind< ROSMessageType, AllocatorT > |
| using | ROSMessageTypeAllocator = typename ROSMessageTypeAllocatorTraits::allocator_type |
| using | ROSMessageTypeDeleter = allocator::Deleter< ROSMessageTypeAllocator, ROSMessageType > |
| using | MessageAllocatorTraits = ROSMessageTypeAllocatorTraits |
| using | MessageAllocator = ROSMessageTypeAllocator |
| using | MessageDeleter = ROSMessageTypeDeleter |
| using | ConstMessageSharedPtr = std::shared_ptr< const ROSMessageType > |
| using | MessageUniquePtr = std::unique_ptr< ROSMessageType, ROSMessageTypeDeleter > |
 Public Types inherited from rclcpp::SubscriptionBase Public Types inherited from rclcpp::SubscriptionBase | |
| using | IntraProcessManagerWeakPtr = std::weak_ptr< rclcpp::experimental::IntraProcessManager > |
Public Member Functions | |
| Subscription (rclcpp::node_interfaces::NodeBaseInterface *node_base, const rosidl_message_type_support_t &type_support_handle, const std::string &topic_name, const rclcpp::QoS &qos, AnySubscriptionCallback< MessageT, AllocatorT > callback, const rclcpp::SubscriptionOptionsWithAllocator< AllocatorT > &options, typename MessageMemoryStrategyT::SharedPtr message_memory_strategy, SubscriptionTopicStatisticsSharedPtr subscription_topic_statistics=nullptr) | |
| Default constructor. More... | |
| void | post_init_setup (rclcpp::node_interfaces::NodeBaseInterface *node_base, const rclcpp::QoS &qos, const rclcpp::SubscriptionOptionsWithAllocator< AllocatorT > &options) |
| Called after construction to continue setup that requires shared_from_this(). | |
| bool | take (ROSMessageType &message_out, rclcpp::MessageInfo &message_info_out) |
| Take the next message from the inter-process subscription. More... | |
| template<typename TakeT > | |
| std::enable_if_t< !rosidl_generator_traits::is_message< TakeT >::value &&std::is_same_v< TakeT, SubscribedType >, bool > | take (TakeT &message_out, rclcpp::MessageInfo &message_info_out) |
| Take the next message from the inter-process subscription. More... | |
| std::shared_ptr< void > | create_message () override |
| Borrow a new message. More... | |
| std::shared_ptr< rclcpp::SerializedMessage > | create_serialized_message () override |
| Borrow a new serialized message. More... | |
| void | handle_message (std::shared_ptr< void > &message, const rclcpp::MessageInfo &message_info) override |
| Check if we need to handle the message, and execute the callback if we do. More... | |
| void | handle_serialized_message (const std::shared_ptr< rclcpp::SerializedMessage > &serialized_message, const rclcpp::MessageInfo &message_info) override |
| void | handle_loaned_message (void *loaned_message, const rclcpp::MessageInfo &message_info) override |
| void | return_message (std::shared_ptr< void > &message) override |
| Return the borrowed message. More... | |
| void | return_serialized_message (std::shared_ptr< rclcpp::SerializedMessage > &message) override |
| Return the borrowed serialized message. More... | |
| bool | use_take_shared_method () const |
| rclcpp::dynamic_typesupport::DynamicMessageType::SharedPtr | get_shared_dynamic_message_type () override |
| rclcpp::dynamic_typesupport::DynamicMessage::SharedPtr | get_shared_dynamic_message () override |
| rclcpp::dynamic_typesupport::DynamicSerializationSupport::SharedPtr | get_shared_dynamic_serialization_support () override |
| rclcpp::dynamic_typesupport::DynamicMessage::SharedPtr | create_dynamic_message () override |
| Borrow a new serialized message (this clones!) More... | |
| void | return_dynamic_message (rclcpp::dynamic_typesupport::DynamicMessage::SharedPtr &message) override |
| void | handle_dynamic_message (const rclcpp::dynamic_typesupport::DynamicMessage::SharedPtr &message, const rclcpp::MessageInfo &message_info) override |
| Public Member Functions inherited from rclcpp::SubscriptionBase | |
| RCLCPP_PUBLIC | SubscriptionBase (rclcpp::node_interfaces::NodeBaseInterface *node_base, const rosidl_message_type_support_t &type_support_handle, const std::string &topic_name, const rcl_subscription_options_t &subscription_options, const SubscriptionEventCallbacks &event_callbacks, bool use_default_callbacks, DeliveredMessageKind delivered_message_kind=DeliveredMessageKind::ROS_MESSAGE) |
| Constructor. More... | |
| virtual RCLCPP_PUBLIC | ~SubscriptionBase () |
| Destructor. | |
| RCLCPP_PUBLIC void | bind_event_callbacks (const SubscriptionEventCallbacks &event_callbacks, bool use_default_callbacks) |
| Add event handlers for passed in event_callbacks. | |
| RCLCPP_PUBLIC const char * | get_topic_name () const |
| Get the topic that this subscription is subscribed on. | |
| RCLCPP_PUBLIC std::shared_ptr< rcl_subscription_t > | get_subscription_handle () |
| RCLCPP_PUBLIC std::shared_ptr< const rcl_subscription_t > | get_subscription_handle () const |
| RCLCPP_PUBLIC const std::unordered_map< rcl_subscription_event_type_t, std::shared_ptr< rclcpp::EventHandlerBase > > & | get_event_handlers () const |
| Get all the QoS event handlers associated with this subscription. More... | |
| RCLCPP_PUBLIC rclcpp::QoS | get_actual_qos () const |
| Get the actual QoS settings, after the defaults have been determined. More... | |
| RCLCPP_PUBLIC bool | take_type_erased (void *message_out, rclcpp::MessageInfo &message_info_out) |
| Take the next inter-process message from the subscription as a type erased pointer. More... | |
| RCLCPP_PUBLIC bool | take_serialized (rclcpp::SerializedMessage &message_out, rclcpp::MessageInfo &message_info_out) |
| Take the next inter-process message, in its serialized form, from the subscription. More... | |
| RCLCPP_PUBLIC const rosidl_message_type_support_t & | get_message_type_support_handle () const |
| RCLCPP_PUBLIC bool | is_serialized () const |
| Return if the subscription is serialized. More... | |
| RCLCPP_PUBLIC DeliveredMessageKind | get_delivered_message_kind () const |
| Return the delivered message kind. More... | |
| RCLCPP_PUBLIC size_t | get_publisher_count () const |
| Get matching publisher count. More... | |
| RCLCPP_PUBLIC bool | can_loan_messages () const |
| Check if subscription instance can loan messages. More... | |
| RCLCPP_PUBLIC void | setup_intra_process (uint64_t intra_process_subscription_id, IntraProcessManagerWeakPtr weak_ipm) |
| Implemenation detail. | |
| RCLCPP_PUBLIC rclcpp::Waitable::SharedPtr | get_intra_process_waitable () const |
| Return the waitable for intra-process. More... | |
| RCLCPP_PUBLIC bool | exchange_in_use_by_wait_set_state (void *pointer_to_subscription_part, bool in_use_state) |
| Exchange state of whether or not a part of the subscription is used by a wait set. More... | |
| RCLCPP_PUBLIC std::vector< rclcpp::NetworkFlowEndpoint > | get_network_flow_endpoints () const |
| Get network flow endpoints. More... | |
| void | set_on_new_message_callback (std::function< void(size_t)> callback) |
| Set a callback to be called when each new message is received. More... | |
| void | clear_on_new_message_callback () |
| Unset the callback registered for new messages, if any. | |
| void | set_on_new_intra_process_message_callback (std::function< void(size_t)> callback) |
| Set a callback to be called when each new intra-process message is received. More... | |
| void | clear_on_new_intra_process_message_callback () |
| Unset the callback registered for new intra-process messages, if any. | |
| void | set_on_new_qos_event_callback (std::function< void(size_t)> callback, rcl_subscription_event_type_t event_type) |
| Set a callback to be called when each new qos event instance occurs. More... | |
| void | clear_on_new_qos_event_callback (rcl_subscription_event_type_t event_type) |
| Unset the callback registered for new qos events, if any. | |
| RCLCPP_PUBLIC bool | is_cft_enabled () const |
| Check if content filtered topic feature of the subscription instance is enabled. More... | |
| RCLCPP_PUBLIC void | set_content_filter (const std::string &filter_expression, const std::vector< std::string > &expression_parameters={}) |
| Set the filter expression and expression parameters for the subscription. More... | |
| RCLCPP_PUBLIC rclcpp::ContentFilterOptions | get_content_filter () const |
| Get the filter expression and expression parameters for the subscription. More... | |
| RCLCPP_PUBLIC bool | take_dynamic_message (rclcpp::dynamic_typesupport::DynamicMessage &message_out, rclcpp::MessageInfo &message_info_out) |
Friends | |
| class | rclcpp::node_interfaces::NodeTopicsInterface |
Additional Inherited Members | |
| Protected Member Functions inherited from rclcpp::SubscriptionBase | |
| template<typename EventCallbackT > | |
| void | add_event_handler (const EventCallbackT &callback, const rcl_subscription_event_type_t event_type) |
| RCLCPP_PUBLIC void | default_incompatible_qos_callback (QOSRequestedIncompatibleQoSInfo &info) const |
| RCLCPP_PUBLIC void | default_incompatible_type_callback (IncompatibleTypeInfo &info) const |
| RCLCPP_PUBLIC bool | matches_any_intra_process_publishers (const rmw_gid_t *sender_gid) const |
| RCLCPP_PUBLIC void | set_on_new_message_callback (rcl_event_callback_t callback, const void *user_data) |
| Protected Attributes inherited from rclcpp::SubscriptionBase | |
| rclcpp::node_interfaces::NodeBaseInterface *const | node_base_ |
| std::shared_ptr< rcl_node_t > | node_handle_ |
| std::recursive_mutex | callback_mutex_ |
| std::function< void(size_t)> | on_new_message_callback_ {nullptr} |
| std::shared_ptr< rcl_subscription_t > | subscription_handle_ |
| std::shared_ptr< rcl_subscription_t > | intra_process_subscription_handle_ |
| rclcpp::Logger | node_logger_ |
| std::unordered_map< rcl_subscription_event_type_t, std::shared_ptr< rclcpp::EventHandlerBase > > | event_handlers_ |
| bool | use_intra_process_ |
| IntraProcessManagerWeakPtr | weak_ipm_ |
| uint64_t | intra_process_subscription_id_ |
| std::shared_ptr< rclcpp::experimental::SubscriptionIntraProcessBase > | subscription_intra_process_ |
| const SubscriptionEventCallbacks | event_callbacks_ |
Detailed Description
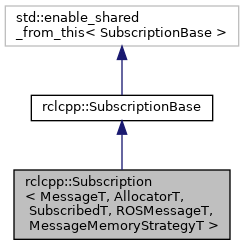
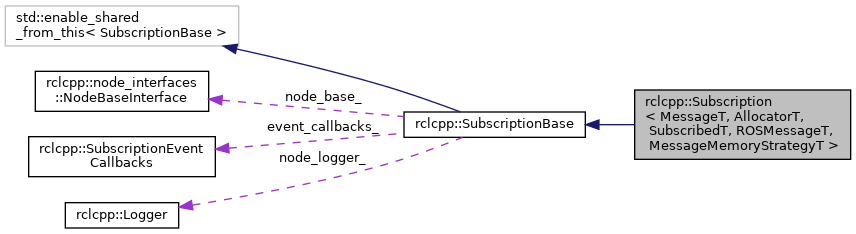
template<typename MessageT, typename AllocatorT = std::allocator<void>, typename SubscribedT = typename rclcpp::TypeAdapter<MessageT>::custom_type, typename ROSMessageT = typename rclcpp::TypeAdapter<MessageT>::ros_message_type, typename MessageMemoryStrategyT = rclcpp::message_memory_strategy::MessageMemoryStrategy< ROSMessageT, AllocatorT >>
class rclcpp::Subscription< MessageT, AllocatorT, SubscribedT, ROSMessageT, MessageMemoryStrategyT >
Subscription implementation, templated on the type of message this subscription receives.
Definition at line 75 of file subscription.hpp.
Constructor & Destructor Documentation
◆ Subscription()
|
inline |
Default constructor.
The constructor for a subscription is almost never called directly. Instead, subscriptions should be instantiated through the function rclcpp::create_subscription().
- Parameters
-
[in] node_base NodeBaseInterface pointer that is used in part of the setup. [in] type_support_handle rosidl type support struct, for the Message type of the topic. [in] topic_name Name of the topic to subscribe to. [in] qos QoS profile for Subcription. [in] callback User defined callback to call when a message is received. [in] options Options for the subscription. [in] message_memory_strategy The memory strategy to be used for managing message memory. [in] subscription_topic_statistics Optional pointer to a topic statistics subcription.
- Exceptions
-
std::invalid_argument if the QoS is uncompatible with intra-process (if one of the following conditions are true: qos_profile.history == RMW_QOS_POLICY_HISTORY_KEEP_ALL, qos_profile.depth == 0 or qos_profile.durability != RMW_QOS_POLICY_DURABILITY_VOLATILE).
Definition at line 131 of file subscription.hpp.
References rclcpp::SubscriptionBase::get_actual_qos(), and rclcpp::SubscriptionBase::setup_intra_process().

Member Function Documentation
◆ create_dynamic_message()
|
inlineoverridevirtual |
Borrow a new serialized message (this clones!)
- Returns
- Shared pointer to a rclcpp::dynamic_typesupport::DynamicMessage.
Implements rclcpp::SubscriptionBase.
Definition at line 429 of file subscription.hpp.
◆ create_message()
|
inlineoverridevirtual |
Borrow a new message.
- Returns
- Shared pointer to the fresh message.
Implements rclcpp::SubscriptionBase.
Definition at line 281 of file subscription.hpp.
◆ create_serialized_message()
|
inlineoverridevirtual |
Borrow a new serialized message.
- Returns
- Shared pointer to a rcl_message_serialized_t.
Implements rclcpp::SubscriptionBase.
Definition at line 291 of file subscription.hpp.
◆ handle_message()
|
inlineoverridevirtual |
Check if we need to handle the message, and execute the callback if we do.
- Parameters
-
[in] message Shared pointer to the message to handle. [in] message_info Metadata associated with this message.
Implements rclcpp::SubscriptionBase.
Definition at line 297 of file subscription.hpp.
References rclcpp::MessageInfo::get_rmw_message_info().

◆ return_message()
|
inlineoverridevirtual |
Return the borrowed message.
- Parameters
-
[in,out] message message to be returned
Implements rclcpp::SubscriptionBase.
Definition at line 382 of file subscription.hpp.
◆ return_serialized_message()
|
inlineoverridevirtual |
Return the borrowed serialized message.
- Parameters
-
[in,out] message serialized message to be returned
Implements rclcpp::SubscriptionBase.
Definition at line 393 of file subscription.hpp.
◆ take() [1/2]
|
inline |
Take the next message from the inter-process subscription.
Data may be taken (written) into the message_out and message_info_out even if false is returned. Specifically in the case of dropping redundant intra-process data, where data is received via both intra-process and inter-process (due to the underlying middleware being unabled to avoid this duplicate delivery) and so inter-process data from those intra-process publishers is ignored, but it has to be taken to know if it came from an intra-process publisher or not, and therefore could be dropped.
- Parameters
-
[out] message_out The message into which take will copy the data. [out] message_info_out The message info for the taken message.
- Returns
- true if data was taken and is valid, otherwise false
- Exceptions
-
any rcl errors from rcl_take,
- See also
- rclcpp::exceptions::throw_from_rcl_error()
Definition at line 252 of file subscription.hpp.
References rclcpp::SubscriptionBase::take_type_erased().

◆ take() [2/2]
|
inline |
Take the next message from the inter-process subscription.
This version takes a SubscribedType which is different from the ROSMessageType when a rclcpp::TypeAdapter is in used.
Definition at line 270 of file subscription.hpp.
References rclcpp::SubscriptionBase::take_type_erased().

The documentation for this class was generated from the following file:
- rclcpp/include/rclcpp/subscription.hpp