Classes | |
| class | Impl |
Public Member Functions | |
| RCLCPP_PUBLIC | Clock (rcl_clock_type_t clock_type=RCL_SYSTEM_TIME) |
| Default c'tor. More... | |
| RCLCPP_PUBLIC Time | now () const |
| RCLCPP_PUBLIC bool | sleep_until (Time until, Context::SharedPtr context=contexts::get_global_default_context()) |
| RCLCPP_PUBLIC bool | sleep_for (Duration rel_time, Context::SharedPtr context=contexts::get_global_default_context()) |
| RCLCPP_PUBLIC bool | started () |
| RCLCPP_PUBLIC bool | wait_until_started (Context::SharedPtr context=contexts::get_global_default_context()) |
| RCLCPP_PUBLIC bool | wait_until_started (const rclcpp::Duration &timeout, Context::SharedPtr context=contexts::get_global_default_context(), const rclcpp::Duration &wait_tick_ns=rclcpp::Duration(0, static_cast< uint32_t >(1e7))) |
| RCLCPP_PUBLIC bool | ros_time_is_active () |
| RCLCPP_PUBLIC rcl_clock_t * | get_clock_handle () noexcept |
| Return the rcl_clock_t clock handle. | |
| RCLCPP_PUBLIC rcl_clock_type_t | get_clock_type () const noexcept |
| RCLCPP_PUBLIC std::mutex & | get_clock_mutex () noexcept |
| Get the clock's mutex. | |
| RCLCPP_PUBLIC JumpHandler::SharedPtr | create_jump_callback (JumpHandler::pre_callback_t pre_callback, JumpHandler::post_callback_t post_callback, const rcl_jump_threshold_t &threshold) |
| Add a callback to invoke if the jump threshold is exceeded. More... | |
Detailed Description
Constructor & Destructor Documentation
◆ Clock()
|
explicit |
Default c'tor.
Initializes the clock instance with the given clock_type.
WARNING Don't instantiate a clock using RCL_ROS_TIME directly, unless you really know what you are doing. By default no TimeSource is attached to a new clock. This will lead to the unexpected behavior, that your RCL_ROS_TIME will run always on system time. If you want a RCL_ROS_TIME use Node::get_clock(), or make sure to attach a TimeSource yourself.
- Parameters
-
clock_type type of the clock.
- Exceptions
-
anything rclcpp::exceptions::throw_from_rcl_error can throw.
Definition at line 68 of file clock.cpp.
Referenced by wait_until_started().

Member Function Documentation
◆ create_jump_callback()
| JumpHandler::SharedPtr rclcpp::Clock::create_jump_callback | ( | JumpHandler::pre_callback_t | pre_callback, |
| JumpHandler::post_callback_t | post_callback, | ||
| const rcl_jump_threshold_t & | threshold | ||
| ) |
Add a callback to invoke if the jump threshold is exceeded.
These callback functions must remain valid as long as the returned shared pointer is valid.
Function will register callbacks to the callback queue. On time jump all callbacks will be executed whose threshold is greater than the time jump; The logic will first call selected pre_callbacks and then all selected post_callbacks.
Function is only applicable if the clock_type is RCL_ROS_TIME
- Parameters
-
pre_callback Must be non-throwing post_callback Must be non-throwing. threshold Callbacks will be triggered if the time jump is greater than the threshold.
- Exceptions
-
anything rclcpp::exceptions::throw_from_rcl_error can throw. std::bad_alloc if the allocation of the JumpHandler fails.
- Warning
- the instance of the clock must remain valid as long as any created JumpHandler.
Definition at line 320 of file clock.cpp.
References rcl_clock_add_jump_callback(), and RCL_RET_OK.
Referenced by sleep_until().


◆ now()
| Time rclcpp::Clock::now | ( | ) | const |
Returns current time from the time source specified by clock_type.
- Returns
- current time.
- Exceptions
-
anything rclcpp::exceptions::throw_from_rcl_error can throw.
Definition at line 74 of file clock.cpp.
References rcl_time_point_s::nanoseconds, rcl_clock_get_now(), and RCL_RET_OK.
Referenced by sleep_for(), sleep_until(), and wait_until_started().


◆ ros_time_is_active()
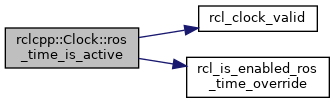
| bool rclcpp::Clock::ros_time_is_active | ( | ) |
Returns the clock of the type RCL_ROS_TIME is active.
- Returns
- true if the clock is active
- Exceptions
-
anything rclcpp::exceptions::throw_from_rcl_error can throw if the current clock does not have the clock_type RCL_ROS_TIME.
Definition at line 268 of file clock.cpp.
References rcl_clock_valid(), rcl_is_enabled_ros_time_override(), and RCL_RET_OK.
Referenced by sleep_until().

◆ sleep_for()
| bool rclcpp::Clock::sleep_for | ( | Duration | rel_time, |
| Context::SharedPtr | context = contexts::get_global_default_context() |
||
| ) |
Sleep for a specified Duration.
Equivalent to
The function will return immediately if rel_time is zero or negative.
- Parameters
-
rel_time the length of time to sleep for. context the rclcpp context the clock should use to check that ROS is still initialized.
- Returns
- true when the end time is reached
- false if time cannot be reached reliably, for example from shutdown or a change of time source.
- Exceptions
-
std::runtime_error if the context is invalid
Definition at line 197 of file clock.cpp.
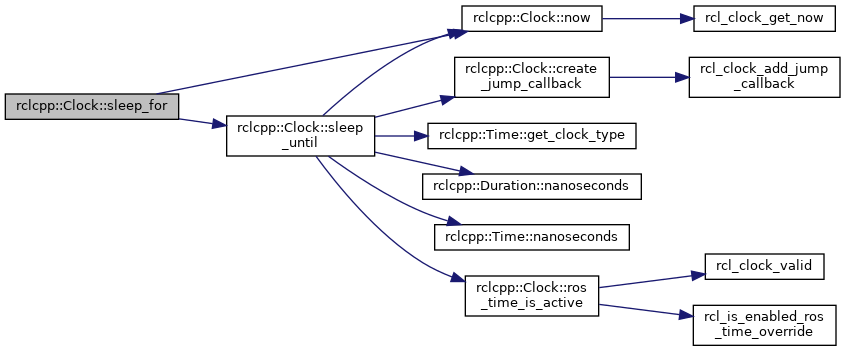
References now(), and sleep_until().
Referenced by wait_until_started().

◆ sleep_until()
| bool rclcpp::Clock::sleep_until | ( | Time | until, |
| Context::SharedPtr | context = contexts::get_global_default_context() |
||
| ) |
Sleep until a specified Time, according to clock type.
Notes for RCL_ROS_TIME clock type:
- Can sleep forever if ros time is active and received clock never reaches
until - If ROS time enabled state changes during the sleep, this method will immediately return false. There is not a consistent choice of sleeping time when the time source changes, so this is up to the caller to call again if needed.
- Warning
- When using gcc < 10 or when using gcc >= 10 and pthreads lacks the function
pthread_cond_clockwait, steady clocks may sleep using the system clock. If so, steady clock sleep times can be affected by system clock time jumps. Depending on the steady clock's epoch and resolution in comparison to the system clock's, an overflow when converting steady clock durations to system clock times may cause undefined behavior. For more info see these issues: https://gcc.gnu.org/bugzilla/show_bug.cgi?id=41861 https://gcc.gnu.org/bugzilla/show_bug.cgi?id=58931
- Parameters
-
until absolute time according to current clock type to sleep until. context the rclcpp context the clock should use to check that ROS is still initialized.
- Returns
- true immediately if
untilis in the past -
true when the time
untilis reached - false if time cannot be reached reliably, for example from shutdown or a change of time source.
- Exceptions
-
std::runtime_error if the context is invalid std::runtime_error if untilhas a different clock type from this clock
Definition at line 87 of file clock.cpp.
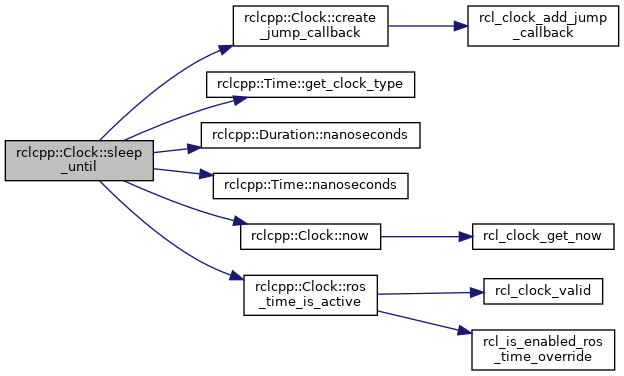
References rcl_time_jump_s::clock_change, create_jump_callback(), rclcpp::Time::get_clock_type(), rcl_jump_threshold_s::min_backward, rcl_jump_threshold_s::min_forward, rcl_duration_s::nanoseconds, rclcpp::Duration::nanoseconds(), rclcpp::Time::nanoseconds(), now(), rcl_jump_threshold_s::on_clock_change, RCL_ROS_TIME, RCL_ROS_TIME_NO_CHANGE, RCL_STEADY_TIME, RCL_SYSTEM_TIME, and ros_time_is_active().
Referenced by sleep_for(), and wait_until_started().

◆ started()
| bool rclcpp::Clock::started | ( | ) |
Check if the clock is started.
A started clock is a clock that reflects non-zero time. Typically a clock will be unstarted if it is using RCL_ROS_TIME with ROS time and nothing has been published on the clock topic yet.
- Returns
- true if clock is started
- Exceptions
-
std::runtime_error if the clock is not rcl_clock_valid
Definition at line 203 of file clock.cpp.
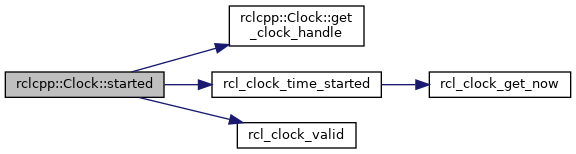
References get_clock_handle(), rcl_clock_time_started(), and rcl_clock_valid().
Referenced by wait_until_started().

◆ wait_until_started() [1/2]
| bool rclcpp::Clock::wait_until_started | ( | const rclcpp::Duration & | timeout, |
| Context::SharedPtr | context = contexts::get_global_default_context(), |
||
| const rclcpp::Duration & | wait_tick_ns = rclcpp::Duration(0, static_cast<uint32_t>(1e7)) |
||
| ) |
Wait for clock to start, with timeout.
The timeout is waited in steady time.
\rclcpp::Clock::started
- Parameters
-
timeout the maximum time to wait for. context the context to wait in. wait_tick_ns the time to wait between each iteration of the wait loop (in nanoseconds).
- Returns
- true if clock was or became valid
- Exceptions
-
std::runtime_error if the context is invalid or clock is not rcl_clock_valid
Definition at line 230 of file clock.cpp.
References Clock(), get_clock_handle(), now(), rcl_clock_valid(), RCL_STEADY_TIME, sleep_for(), and started().
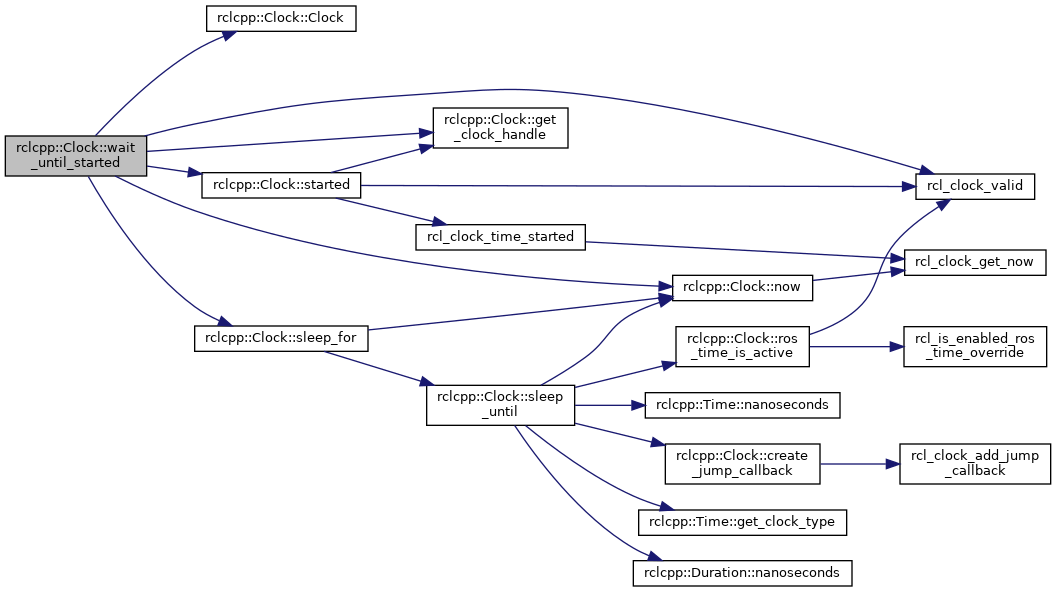
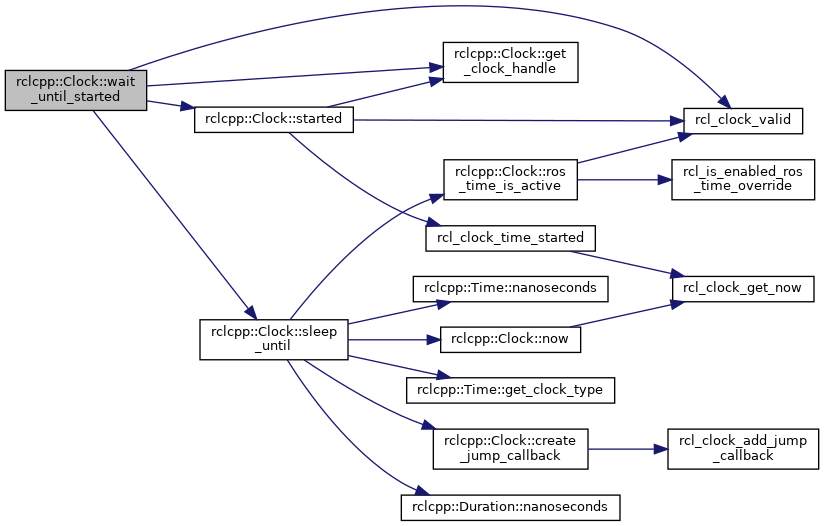
◆ wait_until_started() [2/2]
| bool rclcpp::Clock::wait_until_started | ( | Context::SharedPtr | context = contexts::get_global_default_context() | ) |
Wait until clock to start.
\rclcpp::Clock::started
- Parameters
-
context the context to wait in
- Returns
- true if clock was already started or became started
- Exceptions
-
std::runtime_error if the context is invalid or clock is not rcl_clock_valid
Definition at line 212 of file clock.cpp.
References get_clock_handle(), rcl_clock_valid(), sleep_until(), and started().
The documentation for this class was generated from the following files: