State shared to objects to communicate important rerouting data to avoid rerouting over blocked edges, ensure reroute from the current appropriate starting point along the route, and state of edges if pruned for seeding the Tracker's state. Admittedly, this is a bit complex, so more context is provided inline. More...
#include <nav2_route/include/nav2_route/types.hpp>
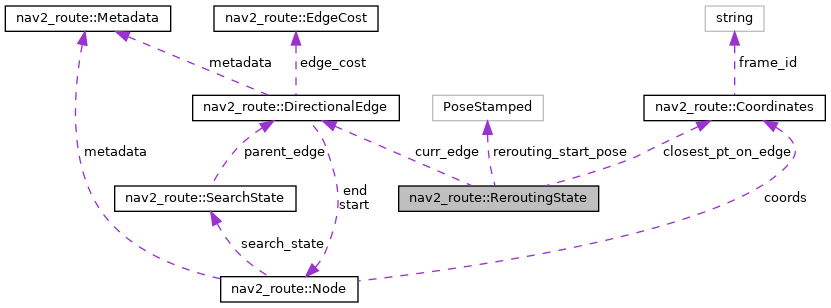
Collaboration diagram for nav2_route::ReroutingState:
Public Member Functions | |
| void | reset () |
Public Attributes | |
| std::vector< unsigned int > | blocked_ids |
| bool | first_time {true} |
| EdgePtr | curr_edge {nullptr} |
| Coordinates | closest_pt_on_edge |
| unsigned int | rerouting_start_id {std::numeric_limits<unsigned int>::max()} |
| geometry_msgs::msg::PoseStamped | rerouting_start_pose |
Detailed Description
State shared to objects to communicate important rerouting data to avoid rerouting over blocked edges, ensure reroute from the current appropriate starting point along the route, and state of edges if pruned for seeding the Tracker's state. Admittedly, this is a bit complex, so more context is provided inline.
The documentation for this struct was generated from the following file:
- nav2_route/include/nav2_route/types.hpp