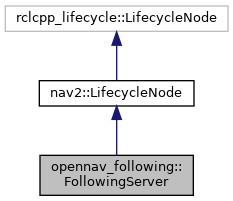
An action server which implements a dynamic following behavior. More...
#include <nav2_following/opennav_following/include/opennav_following/following_server.hpp>
Public Types | |
| using | FollowObject = nav2_msgs::action::FollowObject |
| using | FollowingActionServer = nav2::SimpleActionServer< FollowObject > |
 Public Types inherited from nav2::LifecycleNode Public Types inherited from nav2::LifecycleNode | |
| using | SharedPtr = std::shared_ptr< nav2::LifecycleNode > |
| using | WeakPtr = std::weak_ptr< nav2::LifecycleNode > |
| using | SharedConstPointer = std::shared_ptr< const nav2::LifecycleNode > |
Public Member Functions | |
| FollowingServer (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A constructor for opennav_following::FollowingServer. More... | |
| ~FollowingServer ()=default | |
| A destructor for opennav_following::FollowingServer. | |
| void | publishFollowingFeedback (uint16_t state) |
| Publish feedback from a following action. More... | |
| virtual bool | approachObject (geometry_msgs::msg::PoseStamped &object_pose, const std::string &target_frame=std::string("")) |
| Use control law and perception to approach the object. More... | |
| virtual bool | rotateToObject (geometry_msgs::msg::PoseStamped &object_pose, const std::string &target_frame=std::string("")) |
| Rotate the robot to find the object again. More... | |
| template<typename ActionT > | |
| void | getPreemptedGoalIfRequested (typename std::shared_ptr< const typename ActionT::Goal > goal, const typename nav2::SimpleActionServer< ActionT >::SharedPtr &action_server) |
| Gets a preempted goal if immediately requested. More... | |
| template<typename ActionT > | |
| bool | checkAndWarnIfCancelled (typename nav2::SimpleActionServer< ActionT >::SharedPtr &action_server, const std::string &name) |
| Checks and logs warning if action canceled. More... | |
| template<typename ActionT > | |
| bool | checkAndWarnIfPreempted (typename nav2::SimpleActionServer< ActionT >::SharedPtr &action_server, const std::string &name) |
| Checks and logs warning if action preempted. More... | |
| nav2::CallbackReturn | on_configure (const rclcpp_lifecycle::State &state) override |
| Configure member variables. More... | |
| nav2::CallbackReturn | on_activate (const rclcpp_lifecycle::State &state) override |
| Activate member variables. More... | |
| nav2::CallbackReturn | on_deactivate (const rclcpp_lifecycle::State &state) override |
| Deactivate member variables. More... | |
| nav2::CallbackReturn | on_cleanup (const rclcpp_lifecycle::State &state) override |
| Reset member variables. More... | |
| nav2::CallbackReturn | on_shutdown (const rclcpp_lifecycle::State &state) override |
| Called when in shutdown state. More... | |
| void | publishZeroVelocity () |
| Publish zero velocity at terminal condition. | |
| Public Member Functions inherited from nav2::LifecycleNode | |
| LifecycleNode (const std::string &node_name, const std::string &ns, const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A lifecycle node constructor. More... | |
| LifecycleNode (const std::string &node_name, const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A lifecycle node constructor with no namespace. More... | |
| template<typename ParameterT > | |
| ParameterT | declare_or_get_parameter (const std::string ¶meter_name, const ParameterDescriptor ¶meter_descriptor=ParameterDescriptor()) |
| Declares or gets a parameter with specified type (not value). If the parameter is already declared, returns its value; otherwise declares it with the specified type. More... | |
| template<typename ParamType > | |
| ParamType | declare_or_get_parameter (const std::string ¶meter_name, const ParamType &default_value, const ParameterDescriptor ¶meter_descriptor=ParameterDescriptor()) |
| Declares or gets a parameter. If the parameter is already declared, returns its value; otherwise declares it and returns the default value. More... | |
| template<typename MessageT , typename CallbackT > | |
| nav2::Subscription< MessageT >::SharedPtr | create_subscription (const std::string &topic_name, CallbackT &&callback, const rclcpp::QoS &qos=nav2::qos::StandardTopicQoS(), const rclcpp::CallbackGroup::SharedPtr &callback_group=nullptr) |
| Create a subscription to a topic using Nav2 QoS profiles and SubscriptionOptions. More... | |
| template<typename MessageT > | |
| nav2::Publisher< MessageT >::SharedPtr | create_publisher (const std::string &topic_name, const rclcpp::QoS &qos=nav2::qos::StandardTopicQoS(), const rclcpp::CallbackGroup::SharedPtr &callback_group=nullptr) |
| Create a publisher to a topic using Nav2 QoS profiles and PublisherOptions. More... | |
| template<typename ServiceT > | |
| nav2::ServiceClient< ServiceT >::SharedPtr | create_client (const std::string &service_name, bool use_internal_executor=false) |
| Create a ServiceClient to interface with a service. More... | |
| template<typename ServiceT > | |
| nav2::ServiceServer< ServiceT >::SharedPtr | create_service (const std::string &service_name, typename nav2::ServiceServer< ServiceT >::CallbackType cb, rclcpp::CallbackGroup::SharedPtr callback_group=nullptr) |
| Create a ServiceServer to host with a service. More... | |
| template<typename ActionT > | |
| nav2::SimpleActionServer< ActionT >::SharedPtr | create_action_server (const std::string &action_name, typename nav2::SimpleActionServer< ActionT >::ExecuteCallback execute_callback, typename nav2::SimpleActionServer< ActionT >::CompletionCallback compl_cb=nullptr, std::chrono::milliseconds server_timeout=std::chrono::milliseconds(500), bool spin_thread=false, const bool realtime=false) |
| Create a SimpleActionServer to host with an action. More... | |
| template<typename ActionT > | |
| nav2::ActionClient< ActionT >::SharedPtr | create_action_client (const std::string &action_name, rclcpp::CallbackGroup::SharedPtr callback_group=nullptr) |
| Create a ActionClient to call an action using. More... | |
| nav2::LifecycleNode::SharedPtr | shared_from_this () |
| Get a shared pointer of this. | |
| nav2::LifecycleNode::WeakPtr | weak_from_this () |
| Get a shared pointer of this. | |
| nav2::CallbackReturn | on_error (const rclcpp_lifecycle::State &) |
| Abstracted on_error state transition callback, since unimplemented as of 2020 in the managed ROS2 node state machine. More... | |
| void | autostart () |
| Automatically configure and active the node. | |
| virtual void | on_rcl_preshutdown () |
| Perform preshutdown activities before our Context is shutdown. Note that this is related to our Context's shutdown sequence, not the lifecycle node state machine. | |
| void | createBond () |
| Create bond connection to lifecycle manager. | |
| void | destroyBond () |
| Destroy bond connection to lifecycle manager. | |
Protected Member Functions | |
| void | followObject () |
| Main action callback method to complete following request. | |
| virtual bool | getRefinedPose (geometry_msgs::msg::PoseStamped &pose) |
| Method to obtain the refined dynamic pose. More... | |
| virtual bool | getFramePose (geometry_msgs::msg::PoseStamped &pose, const std::string &frame_id) |
| Get the pose of a specific frame in the fixed frame. More... | |
| virtual bool | getTrackingPose (geometry_msgs::msg::PoseStamped &pose, const std::string &frame_id) |
| Get the tracking pose based on the current tracking mode. More... | |
| geometry_msgs::msg::PoseStamped | getPoseAtDistance (const geometry_msgs::msg::PoseStamped &pose, double distance) |
| Get the pose at a distance in front of the input pose. More... | |
| bool | isGoalReached (const geometry_msgs::msg::PoseStamped &goal_pose) |
| Check if the goal has been reached. More... | |
| rcl_interfaces::msg::SetParametersResult | dynamicParametersCallback (std::vector< rclcpp::Parameter > parameters) |
| Callback executed when a parameter change is detected. More... | |
| Protected Member Functions inherited from nav2::LifecycleNode | |
| void | printLifecycleNodeNotification () |
| Print notifications for lifecycle node. | |
| void | register_rcl_preshutdown_callback () |
| void | runCleanups () |
Protected Attributes | |
| rclcpp::node_interfaces::OnSetParametersCallbackHandle::SharedPtr | dyn_params_handler_ |
| std::mutex | dynamic_params_lock_ |
| double | controller_frequency_ |
| double | rotate_to_object_timeout_ |
| double | static_object_timeout_ |
| rclcpp::Time | static_object_start_time_ |
| bool | static_timer_initialized_ |
| double | transform_tolerance_ |
| double | linear_tolerance_ |
| double | angular_tolerance_ |
| int | max_retries_ |
| int | num_retries_ |
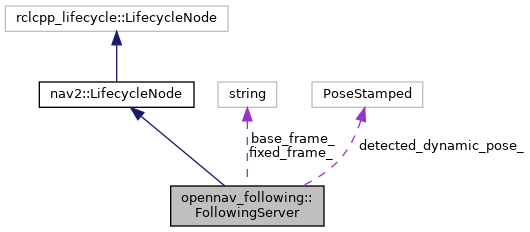
| std::string | base_frame_ |
| std::string | fixed_frame_ |
| double | desired_distance_ |
| bool | skip_orientation_ |
| bool | search_by_rotating_ |
| double | search_angle_ |
| rclcpp::Time | iteration_start_time_ |
| rclcpp::Time | action_start_time_ |
| nav2::Subscription< geometry_msgs::msg::PoseStamped >::SharedPtr | dynamic_pose_sub_ |
| nav2::Publisher< geometry_msgs::msg::PoseStamped >::SharedPtr | filtered_dynamic_pose_pub_ |
| geometry_msgs::msg::PoseStamped | detected_dynamic_pose_ |
| std::unique_ptr< opennav_docking::PoseFilter > | filter_ |
| double | detection_timeout_ |
| std::unique_ptr< nav2_util::TwistPublisher > | vel_publisher_ |
| std::unique_ptr< nav2_util::OdomSmoother > | odom_sub_ |
| FollowingActionServer::SharedPtr | following_action_server_ |
| std::unique_ptr< opennav_docking::Controller > | controller_ |
| std::shared_ptr< tf2_ros::Buffer > | tf2_buffer_ |
| std::unique_ptr< tf2_ros::TransformListener > | tf2_listener_ |
| Protected Attributes inherited from nav2::LifecycleNode | |
| std::unique_ptr< rclcpp::PreShutdownCallbackHandle > | rcl_preshutdown_cb_handle_ {nullptr} |
| std::shared_ptr< bond::Bond > | bond_ {nullptr} |
| double | bond_heartbeat_period {0.1} |
| rclcpp::TimerBase::SharedPtr | autostart_timer_ |
Detailed Description
An action server which implements a dynamic following behavior.
Definition at line 45 of file following_server.hpp.
Constructor & Destructor Documentation
◆ FollowingServer()
|
explicit |
A constructor for opennav_following::FollowingServer.
- Parameters
-
options Additional options to control creation of the node.
Definition at line 31 of file following_server.cpp.
Member Function Documentation
◆ approachObject()
|
virtual |
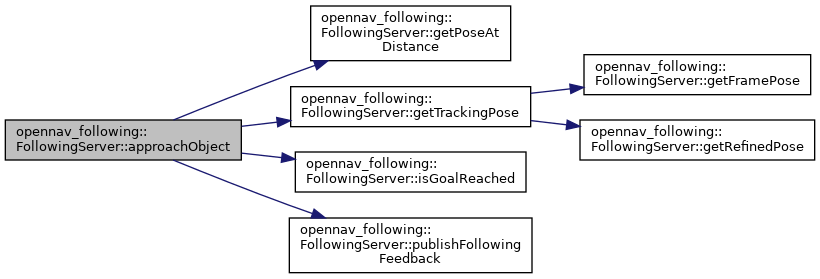
Use control law and perception to approach the object.
- Parameters
-
object_pose Initial object pose, will be refined by perception. target_frame The frame to be tracked instead of the pose.
- Returns
- True if successfully approached, False if cancelled. For any internal error, will throw.
Definition at line 379 of file following_server.cpp.
References getPoseAtDistance(), getTrackingPose(), isGoalReached(), and publishFollowingFeedback().
Referenced by followObject().

◆ checkAndWarnIfCancelled()
| bool opennav_following::FollowingServer::checkAndWarnIfCancelled | ( | typename nav2::SimpleActionServer< ActionT >::SharedPtr & | action_server, |
| const std::string & | name | ||
| ) |
Checks and logs warning if action canceled.
- Parameters
-
action_server Action server to check for cancellation on name Name of action to put in warning message
- Returns
- True if action has been cancelled
Definition at line 198 of file following_server.cpp.
References nav2::SimpleActionServer< ActionT >::is_cancel_requested().

◆ checkAndWarnIfPreempted()
| bool opennav_following::FollowingServer::checkAndWarnIfPreempted | ( | typename nav2::SimpleActionServer< ActionT >::SharedPtr & | action_server, |
| const std::string & | name | ||
| ) |
Checks and logs warning if action preempted.
- Parameters
-
action_server Action server to check for preemption on name Name of action to put in warning message
- Returns
- True if action has been preempted
Definition at line 210 of file following_server.cpp.
References nav2::SimpleActionServer< ActionT >::is_preempt_requested().

◆ dynamicParametersCallback()
|
protected |
Callback executed when a parameter change is detected.
- Parameters
-
event ParameterEvent message
Definition at line 710 of file following_server.cpp.
Referenced by on_activate().

◆ getFramePose()
|
protectedvirtual |
Get the pose of a specific frame in the fixed frame.
- Parameters
-
pose The output pose. frame_id The frame to get the pose for.
- Returns
- true if successful, false otherwise
Definition at line 623 of file following_server.cpp.
Referenced by getTrackingPose().

◆ getPoseAtDistance()
|
protected |
Get the pose at a distance in front of the input pose.
- Parameters
-
pose Input pose distance Distance to move (in meters)
- Returns
- Pose distance meters in front of the input pose
Definition at line 670 of file following_server.cpp.
Referenced by approachObject().

◆ getPreemptedGoalIfRequested()
| void opennav_following::FollowingServer::getPreemptedGoalIfRequested | ( | typename std::shared_ptr< const typename ActionT::Goal > | goal, |
| const typename nav2::SimpleActionServer< ActionT >::SharedPtr & | action_server | ||
| ) |
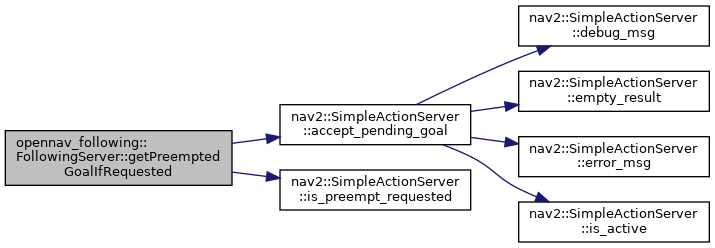
Gets a preempted goal if immediately requested.
- Parameters
-
Goal goal to check or replace if required with preemption action_server Action server to check for preemptions on
- Returns
- SUCCESS or FAILURE
Definition at line 188 of file following_server.cpp.
References nav2::SimpleActionServer< ActionT >::accept_pending_goal(), and nav2::SimpleActionServer< ActionT >::is_preempt_requested().
◆ getRefinedPose()
|
protectedvirtual |
Method to obtain the refined dynamic pose.
- Parameters
-
pose The initial estimate of the dynamic pose which will be updated with the refined pose.
- Returns
- true if successful, false otherwise
Definition at line 554 of file following_server.cpp.
Referenced by getTrackingPose().

◆ getTrackingPose()
|
protectedvirtual |
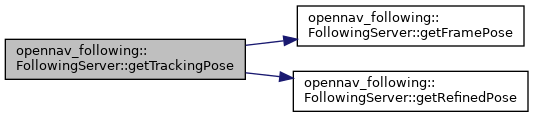
Get the tracking pose based on the current tracking mode.
- Parameters
-
pose The output pose. frame_id The frame to get the pose for.
- Returns
- true if successful, false otherwise.
Definition at line 652 of file following_server.cpp.
References getFramePose(), and getRefinedPose().
Referenced by approachObject(), and rotateToObject().

◆ isGoalReached()
|
protected |
Check if the goal has been reached.
- Parameters
-
goal_pose The goal pose to check
- Returns
- true If the goal has been reached
Definition at line 691 of file following_server.cpp.
Referenced by approachObject().

◆ on_activate()
|
override |
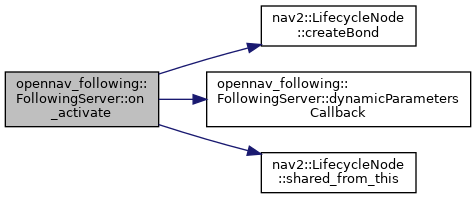
Activate member variables.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 127 of file following_server.cpp.
References nav2::LifecycleNode::createBond(), dynamicParametersCallback(), and nav2::LifecycleNode::shared_from_this().
◆ on_cleanup()
|
override |
Reset member variables.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 168 of file following_server.cpp.
◆ on_configure()
|
override |
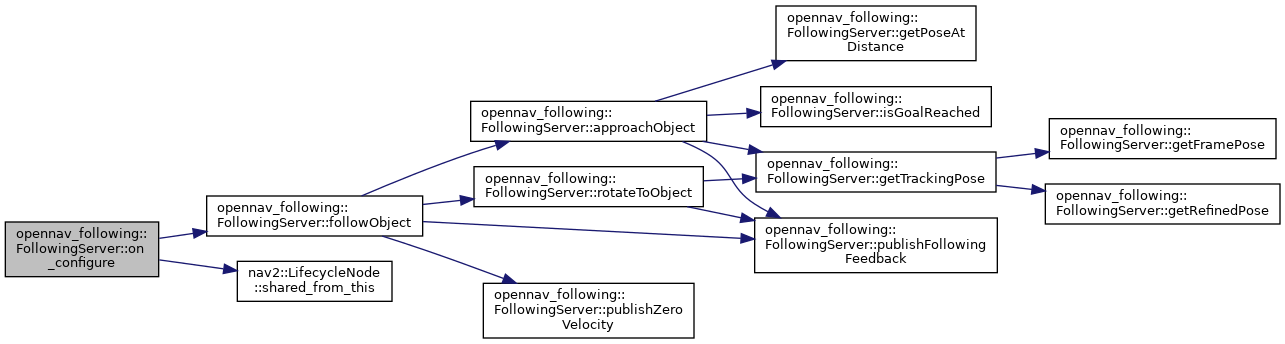
Configure member variables.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 56 of file following_server.cpp.
References followObject(), and nav2::LifecycleNode::shared_from_this().
◆ on_deactivate()
|
override |
Deactivate member variables.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 149 of file following_server.cpp.
References nav2::LifecycleNode::destroyBond().

◆ on_shutdown()
|
override |
Called when in shutdown state.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 181 of file following_server.cpp.
◆ publishFollowingFeedback()
| void opennav_following::FollowingServer::publishFollowingFeedback | ( | uint16_t | state | ) |
Publish feedback from a following action.
- Parameters
-
state Current state - should be one of those defined in message.
Definition at line 545 of file following_server.cpp.
Referenced by approachObject(), followObject(), and rotateToObject().

◆ rotateToObject()
|
virtual |
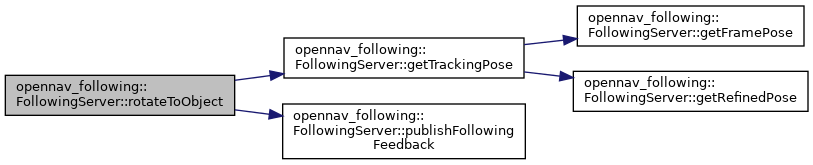
Rotate the robot to find the object again.
- Parameters
-
object_pose The last known object pose. target_frame The frame to be tracked instead of the pose.
- Returns
- True if successful.
Definition at line 446 of file following_server.cpp.
References getTrackingPose(), and publishFollowingFeedback().
Referenced by followObject().

The documentation for this class was generated from the following files:
- nav2_following/opennav_following/include/opennav_following/following_server.hpp
- nav2_following/opennav_following/src/following_server.cpp