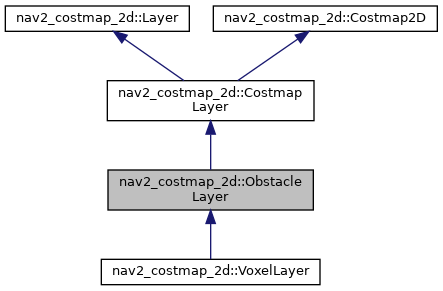
Takes in laser and pointcloud data to populate into 2D costmap. More...
#include <nav2_costmap_2d/include/nav2_costmap_2d/obstacle_layer.hpp>
Public Member Functions | |
| ObstacleLayer () | |
| A constructor. | |
| virtual | ~ObstacleLayer () |
| A destructor. | |
| virtual void | onInitialize () |
| Initialization process of layer on startup. | |
| virtual void | updateBounds (double robot_x, double robot_y, double robot_yaw, double *min_x, double *min_y, double *max_x, double *max_y) |
| Update the bounds of the master costmap by this layer's update dimensions. More... | |
| virtual void | updateCosts (nav2_costmap_2d::Costmap2D &master_grid, int min_i, int min_j, int max_i, int max_j) |
| Update the costs in the master costmap in the window. More... | |
| virtual void | deactivate () |
| Deactivate the layer. | |
| virtual void | activate () |
| Activate the layer. | |
| virtual void | reset () |
| Reset this costmap. | |
| virtual bool | isClearable () |
| If clearing operations should be processed on this layer or not. | |
| rcl_interfaces::msg::SetParametersResult | dynamicParametersCallback (std::vector< rclcpp::Parameter > parameters) |
| Callback executed when a parameter change is detected. More... | |
| void | resetBuffersLastUpdated () |
| triggers the update of observations buffer | |
| void | laserScanCallback (sensor_msgs::msg::LaserScan::ConstSharedPtr message, const std::shared_ptr< nav2_costmap_2d::ObservationBuffer > &buffer) |
| A callback to handle buffering LaserScan messages. More... | |
| void | laserScanValidInfCallback (sensor_msgs::msg::LaserScan::ConstSharedPtr message, const std::shared_ptr< nav2_costmap_2d::ObservationBuffer > &buffer) |
| A callback to handle buffering LaserScan messages which need filtering to turn Inf values into range_max. More... | |
| void | pointCloud2Callback (sensor_msgs::msg::PointCloud2::ConstSharedPtr message, const std::shared_ptr< nav2_costmap_2d::ObservationBuffer > &buffer) |
| A callback to handle buffering PointCloud2 messages. More... | |
| void | addStaticObservation (nav2_costmap_2d::Observation &obs, bool marking, bool clearing) |
| void | clearStaticObservations (bool marking, bool clearing) |
 Public Member Functions inherited from nav2_costmap_2d::CostmapLayer Public Member Functions inherited from nav2_costmap_2d::CostmapLayer | |
| CostmapLayer () | |
| CostmapLayer constructor. | |
| bool | isDiscretized () |
| If layer is discrete. | |
| virtual void | matchSize () |
| Match the size of the master costmap. | |
| virtual void | clearArea (int start_x, int start_y, int end_x, int end_y, bool invert) |
| Clear an are in the costmap with the given dimension if invert, then clear everything except these dimensions. | |
| void | addExtraBounds (double mx0, double my0, double mx1, double my1) |
| Public Member Functions inherited from nav2_costmap_2d::Layer | |
| Layer () | |
| A constructor. | |
| virtual | ~Layer () |
| A destructor. | |
| void | initialize (LayeredCostmap *parent, std::string name, tf2_ros::Buffer *tf, const nav2::LifecycleNode::WeakPtr &node, rclcpp::CallbackGroup::SharedPtr callback_group) |
| Initialization process of layer on startup. | |
| virtual void | onFootprintChanged () |
| LayeredCostmap calls this whenever the footprint there changes (via LayeredCostmap::setFootprint()). Override to be notified of changes to the robot's footprint. | |
| std::string | getName () const |
| Get the name of the costmap layer. | |
| bool | isCurrent () const |
| Check to make sure all the data in the layer is up to date. If the layer is not up to date, then it may be unsafe to plan using the data from this layer, and the planner may need to know. More... | |
| bool | isEnabled () const |
| Gets whether the layer is enabled. | |
| const std::vector< geometry_msgs::msg::Point > & | getFootprint () const |
| Convenience function for layered_costmap_->getFootprint(). | |
| void | declareParameter (const std::string ¶m_name, const rclcpp::ParameterValue &value) |
| Convenience functions for declaring ROS parameters. | |
| void | declareParameter (const std::string ¶m_name, const rclcpp::ParameterType ¶m_type) |
| Convenience functions for declaring ROS parameters. | |
| bool | hasParameter (const std::string ¶m_name) |
| Convenience functions for declaring ROS parameters. | |
| std::string | getFullName (const std::string ¶m_name) |
| Convenience functions for declaring ROS parameters. | |
| std::string | joinWithParentNamespace (const std::string &topic) |
| Public Member Functions inherited from nav2_costmap_2d::Costmap2D | |
| Costmap2D (unsigned int cells_size_x, unsigned int cells_size_y, double resolution, double origin_x, double origin_y, unsigned char default_value=0) | |
| Constructor for a costmap. More... | |
| Costmap2D (const Costmap2D &map) | |
| Copy constructor for a costmap, creates a copy efficiently. More... | |
| Costmap2D (const nav_msgs::msg::OccupancyGrid &map) | |
| Constructor for a costmap from an OccupancyGrid map. More... | |
| Costmap2D & | operator= (const Costmap2D &map) |
| Overloaded assignment operator. More... | |
| bool | copyCostmapWindow (const Costmap2D &map, double win_origin_x, double win_origin_y, double win_size_x, double win_size_y) |
| Turn this costmap into a copy of a window of a costmap passed in. More... | |
| bool | copyWindow (const Costmap2D &source, unsigned int sx0, unsigned int sy0, unsigned int sxn, unsigned int syn, unsigned int dx0, unsigned int dy0) |
| Copies the (x0,y0)..(xn,yn) window from source costmap into a current costmap. More... | |
| Costmap2D () | |
| Default constructor. | |
| virtual | ~Costmap2D () |
| Destructor. | |
| unsigned char | getCost (unsigned int mx, unsigned int my) const |
| Get the cost of a cell in the costmap. More... | |
| unsigned char | getCost (unsigned int index) const |
| Get the cost of a cell in the costmap. More... | |
| void | setCost (unsigned int mx, unsigned int my, unsigned char cost) |
| Set the cost of a cell in the costmap. More... | |
| void | mapToWorld (unsigned int mx, unsigned int my, double &wx, double &wy) const |
| Convert from map coordinates to world coordinates. More... | |
| void | mapToWorldNoBounds (int mx, int my, double &wx, double &wy) const |
| Convert from map coordinates to world coordinates with no bounds checking. More... | |
| bool | worldToMap (double wx, double wy, unsigned int &mx, unsigned int &my) const |
| Convert from world coordinates to map coordinates. More... | |
| bool | worldToMapContinuous (double wx, double wy, float &mx, float &my) const |
| Convert from world coordinates to map coordinates. More... | |
| void | worldToMapNoBounds (double wx, double wy, int &mx, int &my) const |
| Convert from world coordinates to map coordinates without checking for legal bounds. More... | |
| void | worldToMapEnforceBounds (double wx, double wy, int &mx, int &my) const |
| Convert from world coordinates to map coordinates, constraining results to legal bounds. More... | |
| unsigned int | getIndex (unsigned int mx, unsigned int my) const |
| Given two map coordinates... compute the associated index. More... | |
| void | indexToCells (unsigned int index, unsigned int &mx, unsigned int &my) const |
| Given an index... compute the associated map coordinates. More... | |
| unsigned char * | getCharMap () const |
| Will return a pointer to the underlying unsigned char array used as the costmap. More... | |
| unsigned int | getSizeInCellsX () const |
| Accessor for the x size of the costmap in cells. More... | |
| unsigned int | getSizeInCellsY () const |
| Accessor for the y size of the costmap in cells. More... | |
| double | getSizeInMetersX () const |
| Accessor for the x size of the costmap in meters. More... | |
| double | getSizeInMetersY () const |
| Accessor for the y size of the costmap in meters. More... | |
| double | getOriginX () const |
| Accessor for the x origin of the costmap. More... | |
| double | getOriginY () const |
| Accessor for the y origin of the costmap. More... | |
| double | getResolution () const |
| Accessor for the resolution of the costmap. More... | |
| void | setDefaultValue (unsigned char c) |
| Set the default background value of the costmap. More... | |
| unsigned char | getDefaultValue () |
| Get the default background value of the costmap. More... | |
| bool | setConvexPolygonCost (const std::vector< geometry_msgs::msg::Point > &polygon, unsigned char cost_value) |
| Sets the cost of a convex polygon to a desired value. More... | |
| bool | getMapRegionOccupiedByPolygon (const std::vector< geometry_msgs::msg::Point > &polygon, std::vector< MapLocation > &polygon_map_region) |
| Gets the map region occupied by polygon. More... | |
| void | setMapRegionOccupiedByPolygon (const std::vector< MapLocation > &polygon_map_region, unsigned char new_cost_value) |
| Sets the given map region to desired value. More... | |
| void | restoreMapRegionOccupiedByPolygon (const std::vector< MapLocation > &polygon_map_region) |
| Restores the corresponding map region using given map region. More... | |
| void | polygonOutlineCells (const std::vector< MapLocation > &polygon, std::vector< MapLocation > &polygon_cells) |
| Get the map cells that make up the outline of a polygon. More... | |
| void | convexFillCells (const std::vector< MapLocation > &polygon, std::vector< MapLocation > &polygon_cells) |
| Get the map cells that fill a convex polygon. More... | |
| virtual void | updateOrigin (double new_origin_x, double new_origin_y) |
| Move the origin of the costmap to a new location.... keeping data when it can. More... | |
| bool | saveMap (std::string file_name) |
| Save the costmap out to a pgm file. More... | |
| void | resizeMap (unsigned int size_x, unsigned int size_y, double resolution, double origin_x, double origin_y) |
| Resize the costmap. | |
| void | resetMap (unsigned int x0, unsigned int y0, unsigned int xn, unsigned int yn) |
| Reset the costmap in bounds. | |
| void | resetMapToValue (unsigned int x0, unsigned int y0, unsigned int xn, unsigned int yn, unsigned char value) |
| Reset the costmap in bounds to a value. | |
| unsigned int | cellDistance (double world_dist) |
| Given distance in the world... convert it to cells. More... | |
| mutex_t * | getMutex () |
Protected Member Functions | |
| bool | getMarkingObservations (std::vector< nav2_costmap_2d::Observation > &marking_observations) const |
| Get the observations used to mark space. More... | |
| bool | getClearingObservations (std::vector< nav2_costmap_2d::Observation > &clearing_observations) const |
| Get the observations used to clear space. More... | |
| virtual void | raytraceFreespace (const nav2_costmap_2d::Observation &clearing_observation, double *min_x, double *min_y, double *max_x, double *max_y) |
| Clear freespace based on one observation. More... | |
| void | updateRaytraceBounds (double ox, double oy, double wx, double wy, double max_range, double min_range, double *min_x, double *min_y, double *max_x, double *max_y) |
| Process update costmap with raytracing the window bounds. | |
| void | updateFootprint (double robot_x, double robot_y, double robot_yaw, double *min_x, double *min_y, double *max_x, double *max_y) |
| Clear costmap layer info below the robot's footprint. | |
| Protected Member Functions inherited from nav2_costmap_2d::CostmapLayer | |
| void | updateWithTrueOverwrite (nav2_costmap_2d::Costmap2D &master_grid, int min_i, int min_j, int max_i, int max_j) |
| void | updateWithOverwrite (nav2_costmap_2d::Costmap2D &master_grid, int min_i, int min_j, int max_i, int max_j) |
| void | updateWithMax (nav2_costmap_2d::Costmap2D &master_grid, int min_i, int min_j, int max_i, int max_j) |
| void | updateWithMaxWithoutUnknownOverwrite (nav2_costmap_2d::Costmap2D &master_grid, int min_i, int min_j, int max_i, int max_j) |
| void | updateWithAddition (nav2_costmap_2d::Costmap2D &master_grid, int min_i, int min_j, int max_i, int max_j) |
| void | touch (double x, double y, double *min_x, double *min_y, double *max_x, double *max_y) |
| void | useExtraBounds (double *min_x, double *min_y, double *max_x, double *max_y) |
| CombinationMethod | combination_method_from_int (const int value) |
| Converts an integer to a CombinationMethod enum and logs on failure. More... | |
| Protected Member Functions inherited from nav2_costmap_2d::Costmap2D | |
| template<typename data_type > | |
| void | copyMapRegion (data_type *source_map, unsigned int sm_lower_left_x, unsigned int sm_lower_left_y, unsigned int sm_size_x, data_type *dest_map, unsigned int dm_lower_left_x, unsigned int dm_lower_left_y, unsigned int dm_size_x, unsigned int region_size_x, unsigned int region_size_y) |
| Copy a region of a source map into a destination map. More... | |
| virtual void | deleteMaps () |
| Deletes the costmap, static_map, and markers data structures. | |
| virtual void | resetMaps () |
| Resets the costmap and static_map to be unknown space. | |
| virtual void | initMaps (unsigned int size_x, unsigned int size_y) |
| Initializes the costmap, static_map, and markers data structures. More... | |
Protected Attributes | |
| std::vector< geometry_msgs::msg::Point > | transformed_footprint_ |
| bool | footprint_clearing_enabled_ |
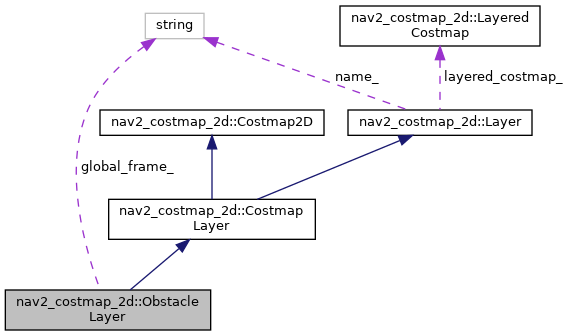
| std::string | global_frame_ |
| The global frame for the costmap. | |
| double | min_obstacle_height_ |
| Max Obstacle Height. | |
| double | max_obstacle_height_ |
| Max Obstacle Height. | |
| laser_geometry::LaserProjection | projector_ |
| Used to project laser scans into point clouds. | |
| std::vector< std::shared_ptr< message_filters::SubscriberBase< rclcpp_lifecycle::LifecycleNode > > > | observation_subscribers_ |
| Used for the observation message filters. | |
| std::vector< std::shared_ptr< tf2_ros::MessageFilterBase > > | observation_notifiers_ |
| Used to make sure that transforms are available for each sensor. | |
| std::vector< std::shared_ptr< nav2_costmap_2d::ObservationBuffer > > | observation_buffers_ |
| Used to store observations from various sensors. | |
| std::vector< std::shared_ptr< nav2_costmap_2d::ObservationBuffer > > | marking_buffers_ |
| Used to store observation buffers used for marking obstacles. | |
| std::vector< std::shared_ptr< nav2_costmap_2d::ObservationBuffer > > | clearing_buffers_ |
| Used to store observation buffers used for clearing obstacles. | |
| rclcpp::node_interfaces::OnSetParametersCallbackHandle::SharedPtr | dyn_params_handler_ |
| Dynamic parameters handler. | |
| std::vector< nav2_costmap_2d::Observation > | static_clearing_observations_ |
| std::vector< nav2_costmap_2d::Observation > | static_marking_observations_ |
| bool | rolling_window_ |
| bool | was_reset_ |
| nav2_costmap_2d::CombinationMethod | combination_method_ |
| Protected Attributes inherited from nav2_costmap_2d::CostmapLayer | |
| bool | has_extra_bounds_ |
| Protected Attributes inherited from nav2_costmap_2d::Layer | |
| LayeredCostmap * | layered_costmap_ |
| std::string | name_ |
| tf2_ros::Buffer * | tf_ |
| rclcpp::CallbackGroup::SharedPtr | callback_group_ |
| nav2::LifecycleNode::WeakPtr | node_ |
| rclcpp::Clock::SharedPtr | clock_ |
| rclcpp::Logger | logger_ {rclcpp::get_logger("nav2_costmap_2d")} |
| bool | current_ |
| bool | enabled_ |
| std::unordered_set< std::string > | local_params_ |
| Protected Attributes inherited from nav2_costmap_2d::Costmap2D | |
| unsigned int | size_x_ |
| unsigned int | size_y_ |
| double | resolution_ |
| double | origin_x_ |
| double | origin_y_ |
| unsigned char * | costmap_ |
| unsigned char | default_value_ |
Additional Inherited Members | |
| Public Types inherited from nav2_costmap_2d::Costmap2D | |
| typedef std::recursive_mutex | mutex_t |
Detailed Description
Takes in laser and pointcloud data to populate into 2D costmap.
Definition at line 72 of file obstacle_layer.hpp.
Member Function Documentation
◆ dynamicParametersCallback()
| rcl_interfaces::msg::SetParametersResult nav2_costmap_2d::ObstacleLayer::dynamicParametersCallback | ( | std::vector< rclcpp::Parameter > | parameters | ) |
Callback executed when a parameter change is detected.
- Parameters
-
event ParameterEvent message
Definition at line 360 of file obstacle_layer.cpp.
References nav2_costmap_2d::CostmapLayer::combination_method_from_int(), max_obstacle_height_, and min_obstacle_height_.
Referenced by onInitialize().


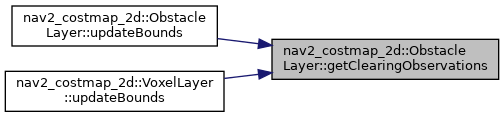
◆ getClearingObservations()
|
protected |
Get the observations used to clear space.
- Parameters
-
clearing_observations A reference to a vector that will be populated with the observations
- Returns
- True if all the observation buffers are current, false otherwise
Definition at line 675 of file obstacle_layer.cpp.
References clearing_buffers_.
Referenced by updateBounds(), and nav2_costmap_2d::VoxelLayer::updateBounds().
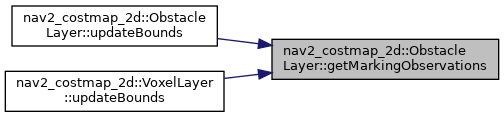
◆ getMarkingObservations()
|
protected |
Get the observations used to mark space.
- Parameters
-
marking_observations A reference to a vector that will be populated with the observations
- Returns
- True if all the observation buffers are current, false otherwise
Definition at line 658 of file obstacle_layer.cpp.
References marking_buffers_.
Referenced by updateBounds(), and nav2_costmap_2d::VoxelLayer::updateBounds().
◆ laserScanCallback()
| void nav2_costmap_2d::ObstacleLayer::laserScanCallback | ( | sensor_msgs::msg::LaserScan::ConstSharedPtr | message, |
| const std::shared_ptr< nav2_costmap_2d::ObservationBuffer > & | buffer | ||
| ) |
A callback to handle buffering LaserScan messages.
- Parameters
-
message The message returned from a message notifier buffer A pointer to the observation buffer to update
Definition at line 400 of file obstacle_layer.cpp.
References global_frame_, and projector_.
Referenced by onInitialize().

◆ laserScanValidInfCallback()
| void nav2_costmap_2d::ObstacleLayer::laserScanValidInfCallback | ( | sensor_msgs::msg::LaserScan::ConstSharedPtr | message, |
| const std::shared_ptr< nav2_costmap_2d::ObservationBuffer > & | buffer | ||
| ) |
A callback to handle buffering LaserScan messages which need filtering to turn Inf values into range_max.
- Parameters
-
message The message returned from a message notifier buffer A pointer to the observation buffer to update
Definition at line 434 of file obstacle_layer.cpp.
References global_frame_, and projector_.
Referenced by onInitialize().

◆ pointCloud2Callback()
| void nav2_costmap_2d::ObstacleLayer::pointCloud2Callback | ( | sensor_msgs::msg::PointCloud2::ConstSharedPtr | message, |
| const std::shared_ptr< nav2_costmap_2d::ObservationBuffer > & | buffer | ||
| ) |
A callback to handle buffering PointCloud2 messages.
- Parameters
-
message The message returned from a message notifier buffer A pointer to the observation buffer to update
Definition at line 477 of file obstacle_layer.cpp.
Referenced by onInitialize().

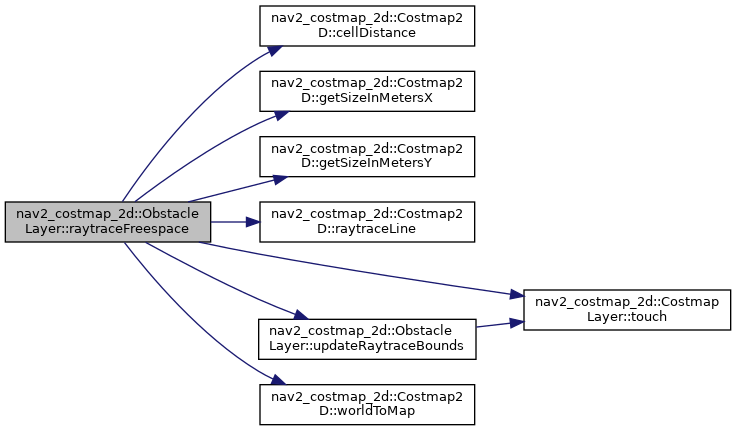
◆ raytraceFreespace()
|
protectedvirtual |
Clear freespace based on one observation.
- Parameters
-
clearing_observation The observation used to raytrace min_x min_y max_x max_y
Reimplemented in nav2_costmap_2d::VoxelLayer.
Definition at line 692 of file obstacle_layer.cpp.
References nav2_costmap_2d::Costmap2D::cellDistance(), nav2_costmap_2d::Costmap2D::getSizeInMetersX(), nav2_costmap_2d::Costmap2D::getSizeInMetersY(), nav2_costmap_2d::CostmapLayer::touch(), updateRaytraceBounds(), and nav2_costmap_2d::Costmap2D::worldToMap().
Referenced by updateBounds().

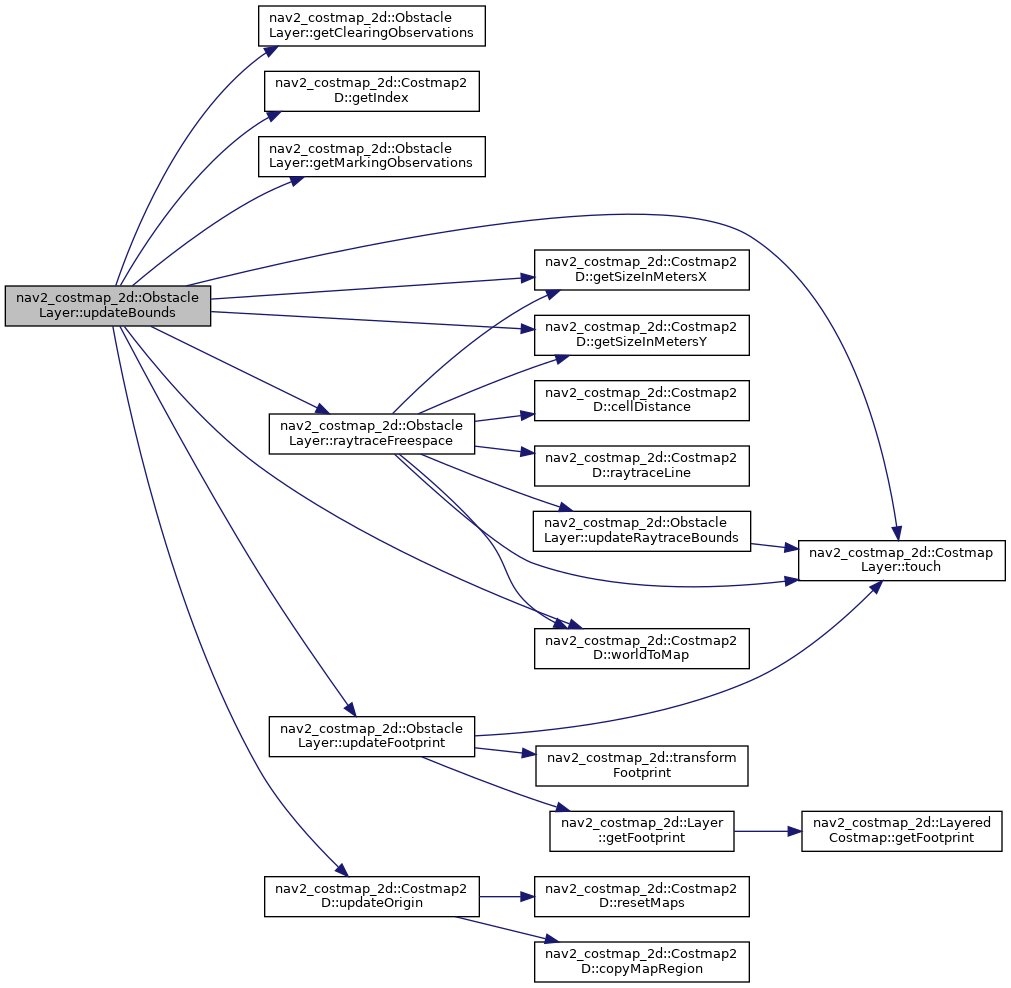
◆ updateBounds()
|
virtual |
Update the bounds of the master costmap by this layer's update dimensions.
- Parameters
-
robot_x X pose of robot robot_y Y pose of robot robot_yaw Robot orientation min_x X min map coord of the window to update min_y Y min map coord of the window to update max_x X max map coord of the window to update max_y Y max map coord of the window to update
Implements nav2_costmap_2d::Layer.
Reimplemented in nav2_costmap_2d::VoxelLayer.
Definition at line 488 of file obstacle_layer.cpp.
References getClearingObservations(), nav2_costmap_2d::Costmap2D::getIndex(), getMarkingObservations(), nav2_costmap_2d::Costmap2D::getSizeInMetersX(), nav2_costmap_2d::Costmap2D::getSizeInMetersY(), max_obstacle_height_, min_obstacle_height_, raytraceFreespace(), nav2_costmap_2d::CostmapLayer::touch(), updateFootprint(), nav2_costmap_2d::Costmap2D::updateOrigin(), and nav2_costmap_2d::Costmap2D::worldToMap().
◆ updateCosts()
|
virtual |
Update the costs in the master costmap in the window.
- Parameters
-
master_grid The master costmap grid to update min_x X min map coord of the window to update min_y Y min map coord of the window to update max_x X max map coord of the window to update max_y Y max map coord of the window to update
Implements nav2_costmap_2d::Layer.
Definition at line 598 of file obstacle_layer.cpp.
References nav2_costmap_2d::Max, nav2_costmap_2d::MaxWithoutUnknownOverwrite, nav2_costmap_2d::Overwrite, and nav2_costmap_2d::Costmap2D::setConvexPolygonCost().

The documentation for this class was generated from the following files:
- nav2_costmap_2d/include/nav2_costmap_2d/obstacle_layer.hpp
- nav2_costmap_2d/plugins/obstacle_layer.cpp