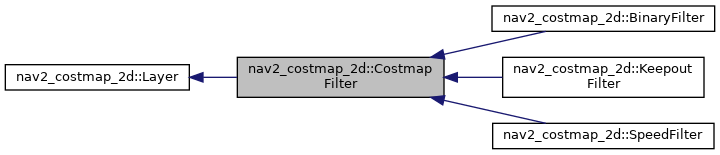
: CostmapFilter basic class. It is inherited from Layer in order to avoid hidden problems when the shared handling of costmap_ resource (PR #1936) More...
#include <nav2_costmap_2d/include/nav2_costmap_2d/costmap_filters/costmap_filter.hpp>
Public Types | |
| typedef std::recursive_mutex | mutex_t |
| : Provide a typedef to ease future code maintenance | |
Public Member Functions | |
| CostmapFilter () | |
| A constructor. | |
| ~CostmapFilter () | |
| A destructor. | |
| mutex_t * | getMutex () |
| : returns pointer to a mutex | |
| void | onInitialize () final |
| Initialization process of layer on startup. | |
| void | updateBounds (double robot_x, double robot_y, double robot_yaw, double *min_x, double *min_y, double *max_x, double *max_y) override |
| Update the bounds of the master costmap by this layer's update dimensions. More... | |
| void | updateCosts (nav2_costmap_2d::Costmap2D &master_grid, int min_i, int min_j, int max_i, int max_j) final |
| Update the costs in the master costmap in the window. More... | |
| void | activate () final |
| Activate the layer. | |
| void | deactivate () final |
| Deactivate the layer. | |
| void | reset () final |
| Reset the layer. | |
| bool | isClearable () |
| If clearing operations should be processed on this layer or not. | |
| virtual void | initializeFilter (const std::string &filter_info_topic)=0 |
| : Initializes costmap filter. Creates subscriptions to filter-related topics More... | |
| virtual void | process (nav2_costmap_2d::Costmap2D &master_grid, int min_i, int min_j, int max_i, int max_j, const geometry_msgs::msg::Pose &pose)=0 |
| : An algorithm for how to use that map's information. Fills the Costmap2D with calculated data and makes an action based on processed data More... | |
| virtual void | resetFilter ()=0 |
| : Resets costmap filter. Stops all subscriptions | |
 Public Member Functions inherited from nav2_costmap_2d::Layer Public Member Functions inherited from nav2_costmap_2d::Layer | |
| Layer () | |
| A constructor. | |
| virtual | ~Layer () |
| A destructor. | |
| void | initialize (LayeredCostmap *parent, std::string name, tf2_ros::Buffer *tf, const nav2::LifecycleNode::WeakPtr &node, rclcpp::CallbackGroup::SharedPtr callback_group) |
| Initialization process of layer on startup. | |
| virtual void | matchSize () |
| Implement this to make this layer match the size of the parent costmap. | |
| virtual void | onFootprintChanged () |
| LayeredCostmap calls this whenever the footprint there changes (via LayeredCostmap::setFootprint()). Override to be notified of changes to the robot's footprint. | |
| std::string | getName () const |
| Get the name of the costmap layer. | |
| bool | isCurrent () const |
| Check to make sure all the data in the layer is up to date. If the layer is not up to date, then it may be unsafe to plan using the data from this layer, and the planner may need to know. More... | |
| bool | isEnabled () const |
| Gets whether the layer is enabled. | |
| const std::vector< geometry_msgs::msg::Point > & | getFootprint () const |
| Convenience function for layered_costmap_->getFootprint(). | |
| void | declareParameter (const std::string ¶m_name, const rclcpp::ParameterValue &value) |
| Convenience functions for declaring ROS parameters. | |
| void | declareParameter (const std::string ¶m_name, const rclcpp::ParameterType ¶m_type) |
| Convenience functions for declaring ROS parameters. | |
| bool | hasParameter (const std::string ¶m_name) |
| Convenience functions for declaring ROS parameters. | |
| std::string | getFullName (const std::string ¶m_name) |
| Convenience functions for declaring ROS parameters. | |
| std::string | joinWithParentNamespace (const std::string &topic) |
Protected Member Functions | |
| void | enableCallback (const std::shared_ptr< rmw_request_id_t > request_header, const std::shared_ptr< std_srvs::srv::SetBool::Request > request, std::shared_ptr< std_srvs::srv::SetBool::Response > response) |
| Costmap filter enabling/disabling callback. More... | |
| bool | transformPose (const std::string global_frame, const geometry_msgs::msg::Pose &global_pose, const std::string mask_frame, geometry_msgs::msg::Pose &mask_pose) const |
| : Transforms robot pose from current layer frame to mask frame More... | |
| int8_t | getMaskData (nav_msgs::msg::OccupancyGrid::ConstSharedPtr filter_mask, const unsigned int mx, const unsigned int my) const |
| Get the data of a cell in the filter mask. More... | |
| unsigned char | getMaskCost (nav_msgs::msg::OccupancyGrid::ConstSharedPtr filter_mask, const unsigned int mx, const unsigned int &my) const |
| Get the cost of a cell in the filter mask. More... | |
Protected Attributes | |
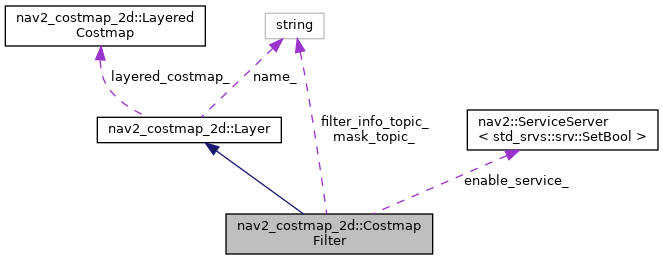
| std::string | filter_info_topic_ |
| : Name of costmap filter info topic | |
| std::string | mask_topic_ |
| : Name of filter mask topic | |
| tf2::Duration | transform_tolerance_ |
| : mask_frame->global_frame_ transform tolerance | |
| nav2::ServiceServer< std_srvs::srv::SetBool >::SharedPtr | enable_service_ |
| : A service to enable/disable costmap filter | |
| Protected Attributes inherited from nav2_costmap_2d::Layer | |
| LayeredCostmap * | layered_costmap_ |
| std::string | name_ |
| tf2_ros::Buffer * | tf_ |
| rclcpp::CallbackGroup::SharedPtr | callback_group_ |
| nav2::LifecycleNode::WeakPtr | node_ |
| rclcpp::Clock::SharedPtr | clock_ |
| rclcpp::Logger | logger_ {rclcpp::get_logger("nav2_costmap_2d")} |
| bool | current_ |
| bool | enabled_ |
| std::unordered_set< std::string > | local_params_ |
Detailed Description
: CostmapFilter basic class. It is inherited from Layer in order to avoid hidden problems when the shared handling of costmap_ resource (PR #1936)
Definition at line 61 of file costmap_filter.hpp.
Member Function Documentation
◆ enableCallback()
|
protected |
Costmap filter enabling/disabling callback.
- Parameters
-
request_header Service request header request Service request response Service response
Definition at line 139 of file costmap_filter.cpp.
Referenced by onInitialize().

◆ getMaskCost()
|
protected |
Get the cost of a cell in the filter mask.
- Parameters
-
filter_mask Filter mask to get the cost from mx The x coordinate of the cell my The y coordinate of the cell
- Returns
- The cost to set the cell to
Definition at line 196 of file costmap_filter.cpp.
Referenced by nav2_costmap_2d::KeepoutFilter::process(), and nav2_costmap_2d::KeepoutFilter::updateBounds().

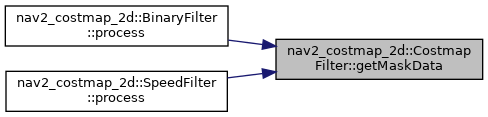
◆ getMaskData()
|
inlineprotected |
Get the data of a cell in the filter mask.
- Parameters
-
filter_mask Filter mask to get the data from mx The x coordinate of the cell my The y coordinate of the cell
- Returns
- The data of the selected cell
Definition at line 195 of file costmap_filter.hpp.
Referenced by nav2_costmap_2d::BinaryFilter::process(), and nav2_costmap_2d::SpeedFilter::process().
◆ initializeFilter()
|
pure virtual |
: Initializes costmap filter. Creates subscriptions to filter-related topics
CostmapFilter API
- Parameters
-
Name of costmap filter info topic
Implemented in nav2_costmap_2d::SpeedFilter, nav2_costmap_2d::KeepoutFilter, and nav2_costmap_2d::BinaryFilter.
Referenced by activate(), and reset().

◆ process()
|
pure virtual |
: An algorithm for how to use that map's information. Fills the Costmap2D with calculated data and makes an action based on processed data
- Parameters
-
Reference to a master costmap2d Low window map boundary OX Low window map boundary OY High window map boundary OX High window map boundary OY Robot 2D-pose
Implemented in nav2_costmap_2d::SpeedFilter, nav2_costmap_2d::KeepoutFilter, and nav2_costmap_2d::BinaryFilter.
Referenced by updateCosts().

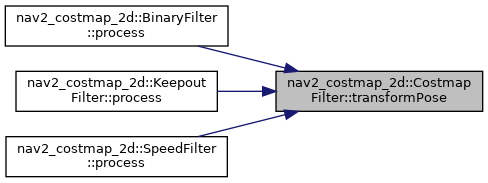
◆ transformPose()
|
protected |
: Transforms robot pose from current layer frame to mask frame
- Parameters
-
global_frame Costmap frame to transform from global_pose Robot pose in costmap frame mask_frame Filter mask frame to transform to mask_pose Output robot pose in mask frame
- Returns
- : True if the transformation was successful, false otherwise
Definition at line 153 of file costmap_filter.cpp.
References transform_tolerance_.
Referenced by nav2_costmap_2d::BinaryFilter::process(), nav2_costmap_2d::SpeedFilter::process(), and nav2_costmap_2d::KeepoutFilter::updateBounds().
◆ updateBounds()
|
overridevirtual |
Update the bounds of the master costmap by this layer's update dimensions.
- Parameters
-
robot_x X pose of robot robot_y Y pose of robot robot_yaw Robot orientation min_x X min map coord of the window to update min_y Y min map coord of the window to update max_x X max map coord of the window to update max_y Y max map coord of the window to update
Implements nav2_costmap_2d::Layer.
Reimplemented in nav2_costmap_2d::KeepoutFilter.
Definition at line 113 of file costmap_filter.cpp.
Referenced by nav2_costmap_2d::KeepoutFilter::updateBounds().

◆ updateCosts()
|
finalvirtual |
Update the costs in the master costmap in the window.
- Parameters
-
master_grid The master costmap grid to update min_x X min map coord of the window to update min_y Y min map coord of the window to update max_x X max map coord of the window to update max_y Y max map coord of the window to update
Implements nav2_costmap_2d::Layer.
Definition at line 127 of file costmap_filter.cpp.
References process().

The documentation for this class was generated from the following files:
- nav2_costmap_2d/include/nav2_costmap_2d/costmap_filters/costmap_filter.hpp
- nav2_costmap_2d/plugins/costmap_filters/costmap_filter.cpp