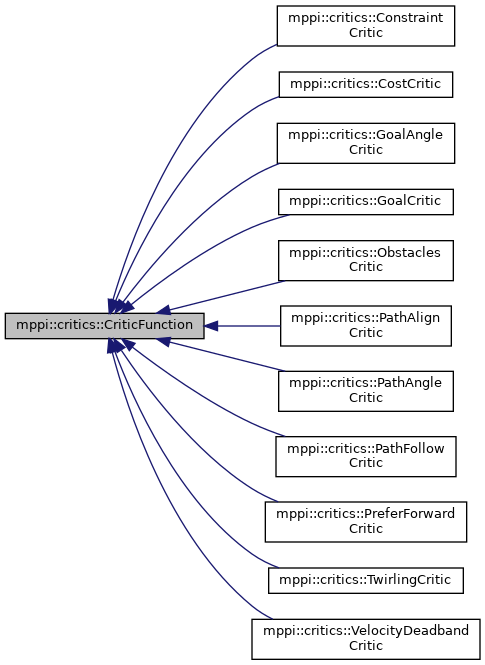
Abstract critic objective function to score trajectories. More...
#include <nav2_mppi_controller/include/nav2_mppi_controller/critic_function.hpp>
Public Member Functions | |
| CriticFunction ()=default | |
| Constructor for mppi::critics::CriticFunction. | |
| virtual | ~CriticFunction ()=default |
| Destructor for mppi::critics::CriticFunction. | |
| void | on_configure (nav2::LifecycleNode::WeakPtr parent, const std::string &parent_name, const std::string &name, std::shared_ptr< nav2_costmap_2d::Costmap2DROS > costmap_ros, ParametersHandler *param_handler) |
| Configure critic on bringup. More... | |
| virtual void | score (CriticData &data)=0 |
| Main function to score trajectory. More... | |
| virtual void | initialize ()=0 |
| Initialize critic. | |
| std::string | getName () |
| Get name of critic. | |
Protected Attributes | |
| bool | enabled_ |
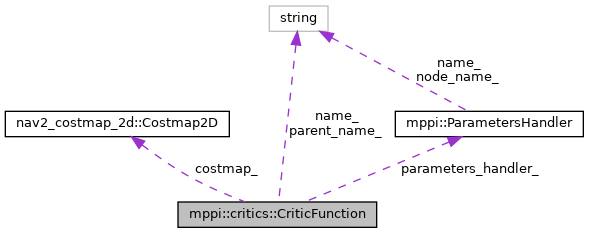
| std::string | name_ |
| std::string | parent_name_ |
| nav2::LifecycleNode::WeakPtr | parent_ |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap_ros_ |
| nav2_costmap_2d::Costmap2D * | costmap_ {nullptr} |
| ParametersHandler * | parameters_handler_ |
| rclcpp::Logger | logger_ {rclcpp::get_logger("MPPIController")} |
Detailed Description
Abstract critic objective function to score trajectories.
Definition at line 44 of file critic_function.hpp.
Member Function Documentation
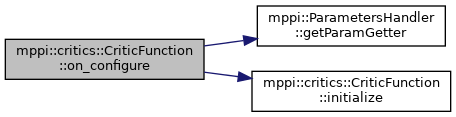
◆ on_configure()
|
inline |
Configure critic on bringup.
- Parameters
-
parent WeakPtr to node parent_name name of the controller name Name of plugin costmap_ros Costmap2DROS object of environment dynamic_parameter_handler Parameter handler object
Definition at line 65 of file critic_function.hpp.
References mppi::ParametersHandler::getParamGetter(), and initialize().
◆ score()
|
pure virtual |
Main function to score trajectory.
- Parameters
-
data Critic data to use in scoring
Implemented in mppi::critics::VelocityDeadbandCritic, mppi::critics::TwirlingCritic, mppi::critics::PreferForwardCritic, mppi::critics::PathFollowCritic, mppi::critics::PathAngleCritic, mppi::critics::PathAlignCritic, mppi::critics::ObstaclesCritic, mppi::critics::GoalCritic, mppi::critics::GoalAngleCritic, mppi::critics::CostCritic, and mppi::critics::ConstraintCritic.
The documentation for this class was generated from the following file:
- nav2_mppi_controller/include/nav2_mppi_controller/critic_function.hpp