Data to pass to critics for scoring, including state, trajectories, pruned path, global goal, costs, and important parameters to share. More...
#include <nav2_mppi_controller/include/nav2_mppi_controller/critic_data.hpp>
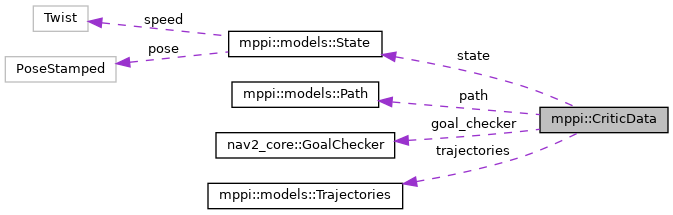
Collaboration diagram for mppi::CriticData:
Public Attributes | |
| const models::State & | state |
| const models::Trajectories & | trajectories |
| const models::Path & | path |
| const geometry_msgs::msg::Pose & | goal |
| Eigen::ArrayXf & | costs |
| float & | model_dt |
| bool | fail_flag |
| nav2_core::GoalChecker * | goal_checker |
| std::shared_ptr< MotionModel > | motion_model |
| std::optional< std::vector< bool > > | path_pts_valid |
| std::optional< size_t > | furthest_reached_path_point |
Detailed Description
Data to pass to critics for scoring, including state, trajectories, pruned path, global goal, costs, and important parameters to share.
Definition at line 39 of file critic_data.hpp.
The documentation for this struct was generated from the following file:
- nav2_mppi_controller/include/nav2_mppi_controller/critic_data.hpp