Classes | |
| struct | AnalyticExpansionNode |
| struct | AnalyticExpansionNodes |
| Analytic expansion nodes and associated metadata. More... | |
Public Member Functions | |
| AnalyticExpansion (const MotionModel &motion_model, const SearchInfo &search_info, const bool &traverse_unknown, const unsigned int &dim_3_size) | |
| Constructor for analytic expansion object. | |
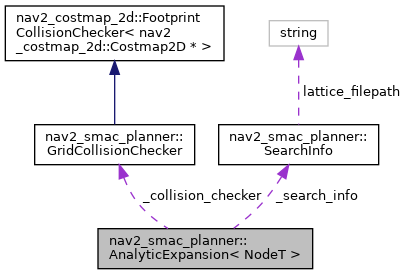
| void | setCollisionChecker (GridCollisionChecker *collision_checker) |
| Sets the collision checker and costmap to use in expansion validation. More... | |
| NodePtr | tryAnalyticExpansion (const NodePtr ¤t_node, const NodeVector &coarse_check_goals, const NodeVector &fine_check_goals, const CoordinateVector &goals_coords, const NodeGetter &getter, int &iterations, int &closest_distance) |
| Attempt an analytic path completion. More... | |
| AnalyticExpansionNodes | getAnalyticPath (const NodePtr &node, const NodePtr &goal, const NodeGetter &getter, const ompl::base::StateSpacePtr &state_space) |
| Perform an analytic path expansion to the goal. More... | |
| float | refineAnalyticPath (NodePtr &node, const NodePtr &goal_node, const NodeGetter &getter, AnalyticExpansionNodes &analytic_nodes) |
| Refined analytic path from the current node to the goal. More... | |
| NodePtr | setAnalyticPath (const NodePtr &node, const NodePtr &goal, const AnalyticExpansionNodes &expanded_nodes) |
| Takes final analytic expansion and appends to current expanded node. More... | |
| int | countDirectionChanges (const ompl::base::ReedsSheppStateSpace::ReedsSheppPath &path) |
| Counts the number of direction changes in a Reeds-Shepp path. More... | |
| void | cleanNode (const NodePtr &nodes) |
| Takes an expanded nodes to clean up, if necessary, of any state information that may be polluting it from a prior search iteration. More... | |
| void | cleanNode (const NodePtr &node) |
| AnalyticExpansion< Node2D >::AnalyticExpansionNodes | getAnalyticPath (const NodePtr &, const NodePtr &, const NodeGetter &, const ompl::base::StateSpacePtr &) |
| float | refineAnalyticPath (NodePtr &, const NodePtr &, const NodeGetter &, AnalyticExpansionNodes &) |
| AnalyticExpansion< Node2D >::NodePtr | setAnalyticPath (const NodePtr &, const NodePtr &, const AnalyticExpansionNodes &) |
| AnalyticExpansion< Node2D >::NodePtr | tryAnalyticExpansion (const NodePtr &, const NodeVector &, const NodeVector &, const CoordinateVector &, const NodeGetter &, int &, int &) |
Protected Attributes | |
| MotionModel | _motion_model |
| SearchInfo | _search_info |
| bool | _traverse_unknown |
| unsigned int | _dim_3_size |
| GridCollisionChecker * | _collision_checker |
| std::list< std::unique_ptr< NodeT > > | _detached_nodes |
Detailed Description
template<typename NodeT>
class nav2_smac_planner::AnalyticExpansion< NodeT >
Definition at line 38 of file analytic_expansion.hpp.
Member Function Documentation
◆ cleanNode()
| void nav2_smac_planner::AnalyticExpansion< NodeT >::cleanNode | ( | const NodePtr & | nodes | ) |
Takes an expanded nodes to clean up, if necessary, of any state information that may be polluting it from a prior search iteration.
- Parameters
-
expanded_nodes Expanded node to clean up from search
Definition at line 441 of file analytic_expansion.cpp.
◆ countDirectionChanges()
| int nav2_smac_planner::AnalyticExpansion< NodeT >::countDirectionChanges | ( | const ompl::base::ReedsSheppStateSpace::ReedsSheppPath & | path | ) |
Counts the number of direction changes in a Reeds-Shepp path.
- Parameters
-
path The Reeds-Shepp path to count direction changes in
- Returns
- The number of direction changes in the path
Definition at line 146 of file analytic_expansion.cpp.
◆ getAnalyticPath()
| AnalyticExpansion< NodeT >::AnalyticExpansionNodes nav2_smac_planner::AnalyticExpansion< NodeT >::getAnalyticPath | ( | const NodePtr & | node, |
| const NodePtr & | goal, | ||
| const NodeGetter & | getter, | ||
| const ompl::base::StateSpacePtr & | state_space | ||
| ) |
Perform an analytic path expansion to the goal.
- Parameters
-
node The node to start the analytic path from goal The goal node to plan to getter The function object that gets valid nodes from the graph state_space State space to use for computing analytic expansions
- Returns
- A set of analytically expanded nodes to the goal from current node, if possible
Definition at line 168 of file analytic_expansion.cpp.
◆ refineAnalyticPath()
| float nav2_smac_planner::AnalyticExpansion< NodeT >::refineAnalyticPath | ( | NodePtr & | node, |
| const NodePtr & | goal_node, | ||
| const NodeGetter & | getter, | ||
| AnalyticExpansionNodes & | analytic_nodes | ||
| ) |
Refined analytic path from the current node to the goal.
- Parameters
-
node The node to start the analytic path from. Node head may change as a result of refinement goal_node The goal node to plan to getter The function object that gets valid nodes from the graph analytic_nodes The set of analytic nodes to refine
- Returns
- The score of the refined path
Definition at line 305 of file analytic_expansion.cpp.
◆ setAnalyticPath()
| AnalyticExpansion< NodeT >::NodePtr nav2_smac_planner::AnalyticExpansion< NodeT >::setAnalyticPath | ( | const NodePtr & | node, |
| const NodePtr & | goal, | ||
| const AnalyticExpansionNodes & | expanded_nodes | ||
| ) |
Takes final analytic expansion and appends to current expanded node.
- Parameters
-
node The node to start the analytic path from goal The goal node to plan to expanded_nodes Expanded nodes to append to end of current search path
- Returns
- Node pointer to goal node if successful, else return nullptr
Definition at line 404 of file analytic_expansion.cpp.
◆ setCollisionChecker()
| void nav2_smac_planner::AnalyticExpansion< NodeT >::setCollisionChecker | ( | GridCollisionChecker * | collision_checker | ) |
Sets the collision checker and costmap to use in expansion validation.
- Parameters
-
collision_checker Collision checker to use
Definition at line 39 of file analytic_expansion.cpp.
◆ tryAnalyticExpansion()
| AnalyticExpansion< NodeT >::NodePtr nav2_smac_planner::AnalyticExpansion< NodeT >::tryAnalyticExpansion | ( | const NodePtr & | current_node, |
| const NodeVector & | coarse_check_goals, | ||
| const NodeVector & | fine_check_goals, | ||
| const CoordinateVector & | goals_coords, | ||
| const NodeGetter & | getter, | ||
| int & | iterations, | ||
| int & | closest_distance | ||
| ) |
Attempt an analytic path completion.
- Parameters
-
node The node to start the analytic path from coarse_check_goals Coarse list of goals nodes to plan to fine_check_goals Fine list of goals nodes to plan to goals_coords vector of goal coordinates to plan to getter Gets a node at a set of coordinates iterations Iterations to run over closest_distance Closest distance to goal
- Returns
- Node pointer reference to goal node with the best score out of the goals node if successful, else return nullptr
Definition at line 46 of file analytic_expansion.cpp.
The documentation for this class was generated from the following files:
- nav2_smac_planner/include/nav2_smac_planner/analytic_expansion.hpp
- nav2_smac_planner/src/analytic_expansion.cpp