Graceful controller plugin. More...
#include <nav2_graceful_controller/include/nav2_graceful_controller/graceful_controller.hpp>
Public Member Functions | |
| GracefulController ()=default | |
| Constructor for nav2_graceful_controller::GracefulController. | |
| ~GracefulController () override=default | |
| Destructor for nav2_graceful_controller::GracefulController. | |
| void | configure (const rclcpp_lifecycle::LifecycleNode::WeakPtr &parent, std::string name, std::shared_ptr< tf2_ros::Buffer > tf, std::shared_ptr< nav2_costmap_2d::Costmap2DROS > costmap_ros) override |
| Configure controller state machine. More... | |
| void | cleanup () override |
| Cleanup controller state machine. | |
| void | activate () override |
| Activate controller state machine. | |
| void | deactivate () override |
| Deactivate controller state machine. | |
| geometry_msgs::msg::TwistStamped | computeVelocityCommands (const geometry_msgs::msg::PoseStamped &pose, const geometry_msgs::msg::Twist &velocity, nav2_core::GoalChecker *goal_checker) override |
| Compute the best command given the current pose and velocity. More... | |
| void | setPlan (const nav_msgs::msg::Path &path) override |
| nav2_core setPlan - Sets the global plan. More... | |
| void | setSpeedLimit (const double &speed_limit, const bool &percentage) override |
| Limits the maximum linear speed of the robot. More... | |
 Public Member Functions inherited from nav2_core::Controller Public Member Functions inherited from nav2_core::Controller | |
| virtual | ~Controller () |
| Virtual destructor. | |
| virtual bool | cancel () |
| Cancel the current control action. More... | |
| virtual void | reset () |
| Reset the state of the controller if necessary after task is exited. | |
Protected Member Functions | |
| bool | simulateTrajectory (const geometry_msgs::msg::PoseStamped &motion_target, const geometry_msgs::msg::TransformStamped &costmap_transform, nav_msgs::msg::Path &trajectory, geometry_msgs::msg::TwistStamped &cmd_vel, bool backward) |
| Simulate trajectory calculating in every step the new velocity command based on a new curvature value and checking for collisions. More... | |
| geometry_msgs::msg::Twist | rotateToTarget (double angle_to_target) |
| Rotate the robot to face the motion target with maximum angular velocity. More... | |
| bool | inCollision (const double &x, const double &y, const double &theta) |
| Checks if the robot is in collision. More... | |
| void | computeDistanceAlongPath (const std::vector< geometry_msgs::msg::PoseStamped > &poses, std::vector< double > &distances) |
| Compute the distance to each pose in a path. More... | |
| void | validateOrientations (std::vector< geometry_msgs::msg::PoseStamped > &path) |
| Control law requires proper orientations, not all planners provide them. More... | |
Protected Attributes | |
| std::shared_ptr< tf2_ros::Buffer > | tf_buffer_ |
| std::string | plugin_name_ |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap_ros_ |
| std::unique_ptr< nav2_costmap_2d::FootprintCollisionChecker< nav2_costmap_2d::Costmap2D * > > | collision_checker_ |
| rclcpp::Logger | logger_ {rclcpp::get_logger("GracefulController")} |
| Parameters * | params_ |
| double | goal_dist_tolerance_ |
| bool | goal_reached_ |
| bool | do_initial_rotation_ |
| std::shared_ptr< rclcpp_lifecycle::LifecyclePublisher< nav_msgs::msg::Path > > | transformed_plan_pub_ |
| std::shared_ptr< rclcpp_lifecycle::LifecyclePublisher< nav_msgs::msg::Path > > | local_plan_pub_ |
| std::shared_ptr< rclcpp_lifecycle::LifecyclePublisher< geometry_msgs::msg::PoseStamped > > | motion_target_pub_ |
| std::shared_ptr< rclcpp_lifecycle::LifecyclePublisher< visualization_msgs::msg::Marker > > | slowdown_pub_ |
| std::unique_ptr< nav2_graceful_controller::PathHandler > | path_handler_ |
| std::unique_ptr< nav2_graceful_controller::ParameterHandler > | param_handler_ |
| std::unique_ptr< nav2_graceful_controller::SmoothControlLaw > | control_law_ |
Additional Inherited Members | |
| Public Types inherited from nav2_core::Controller | |
| using | Ptr = std::shared_ptr< nav2_core::Controller > |
Detailed Description
Graceful controller plugin.
Definition at line 42 of file graceful_controller.hpp.
Member Function Documentation
◆ computeDistanceAlongPath()
|
protected |
Compute the distance to each pose in a path.
- Parameters
-
poses Poses to compute distances with distances Computed distances
Definition at line 413 of file graceful_controller.cpp.
Referenced by computeVelocityCommands().

◆ computeVelocityCommands()
|
overridevirtual |
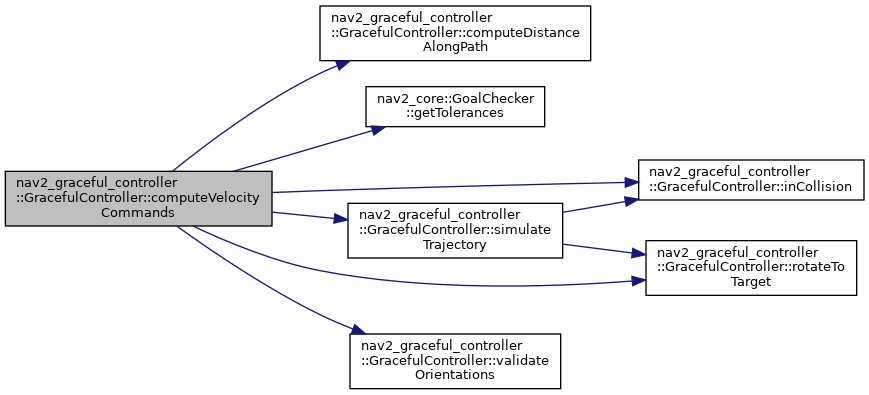
Compute the best command given the current pose and velocity.
- Parameters
-
pose Current robot pose velocity Current robot velocity goal_checker Ptr to the goal checker for this task in case useful in computing commands
- Returns
- Best command
Implements nav2_core::Controller.
Definition at line 113 of file graceful_controller.cpp.
References computeDistanceAlongPath(), nav2_core::GoalChecker::getTolerances(), inCollision(), rotateToTarget(), simulateTrajectory(), and validateOrientations().
◆ configure()
|
overridevirtual |
Configure controller state machine.
- Parameters
-
parent WeakPtr to node name Name of plugin tf TF buffer costmap_ros Costmap2DROS object of environment
Implements nav2_core::Controller.
Definition at line 27 of file graceful_controller.cpp.
◆ inCollision()
|
protected |
Checks if the robot is in collision.
- Parameters
-
x The x coordinate of the robot in global frame y The y coordinate of the robot in global frame theta The orientation of the robot in global frame
- Returns
- Whether in collision
Definition at line 377 of file graceful_controller.cpp.
Referenced by computeVelocityCommands(), and simulateTrajectory().

◆ rotateToTarget()
|
protected |
Rotate the robot to face the motion target with maximum angular velocity.
- Parameters
-
angle_to_target Angle to the motion target
- Returns
- geometry_msgs::msg::Twist Velocity command
Definition at line 367 of file graceful_controller.cpp.
Referenced by computeVelocityCommands(), and simulateTrajectory().

◆ setPlan()
|
overridevirtual |
nav2_core setPlan - Sets the global plan.
- Parameters
-
path The global plan
Implements nav2_core::Controller.
Definition at line 255 of file graceful_controller.cpp.
◆ setSpeedLimit()
|
overridevirtual |
Limits the maximum linear speed of the robot.
- Parameters
-
speed_limit expressed in absolute value (in m/s) or in percentage from maximum robot speed percentage setting speed limit in percentage if true or in absolute values in false case
Implements nav2_core::Controller.
Definition at line 262 of file graceful_controller.cpp.
◆ simulateTrajectory()
|
protected |
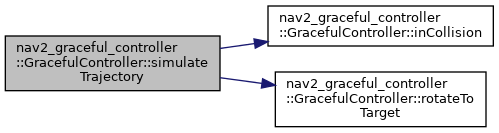
Simulate trajectory calculating in every step the new velocity command based on a new curvature value and checking for collisions.
- Parameters
-
motion_target Motion target point (in costmap local frame?) costmap_transform Transform between global and local costmap trajectory Simulated trajectory cmd_vel Initial command velocity during simulation backward Flag to indicate if the robot is moving backward
- Returns
- true if the trajectory is collision free, false otherwise
Definition at line 286 of file graceful_controller.cpp.
References inCollision(), and rotateToTarget().
Referenced by computeVelocityCommands().

◆ validateOrientations()
|
protected |
Control law requires proper orientations, not all planners provide them.
- Parameters
-
path Path to add orientations into, if required
Definition at line 428 of file graceful_controller.cpp.
Referenced by computeVelocityCommands().

The documentation for this class was generated from the following files:
- nav2_graceful_controller/include/nav2_graceful_controller/graceful_controller.hpp
- nav2_graceful_controller/src/graceful_controller.cpp