An action server which implements charger docking node for AMRs. More...
#include <nav2_docking/opennav_docking/include/opennav_docking/docking_server.hpp>
Public Types | |
| using | DockingActionServer = nav2_util::SimpleActionServer< DockRobot > |
| using | UndockingActionServer = nav2_util::SimpleActionServer< UndockRobot > |
Public Member Functions | |
| DockingServer (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A constructor for opennav_docking::DockingServer. More... | |
| ~DockingServer ()=default | |
| A destructor for opennav_docking::DockingServer. | |
| void | stashDockData (bool use_dock_id, Dock *dock, bool successful) |
| Called at the conclusion of docking actions. Saves relevant docking data for later undocking action. | |
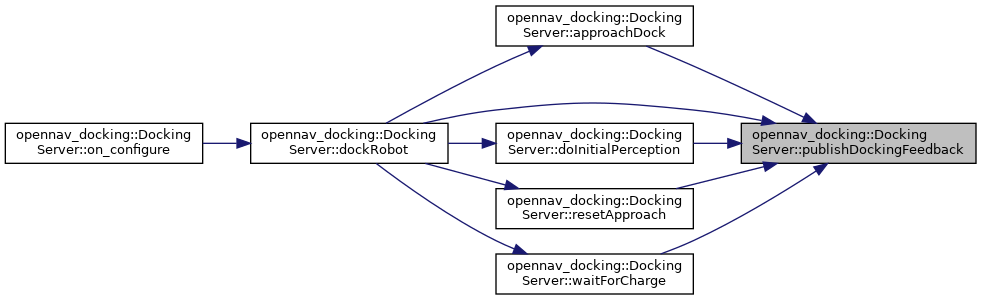
| void | publishDockingFeedback (uint16_t state) |
| Publish feedback from a docking action. More... | |
| Dock * | generateGoalDock (std::shared_ptr< const DockRobot::Goal > goal) |
| Generate a dock from action goal. More... | |
| void | doInitialPerception (Dock *dock, geometry_msgs::msg::PoseStamped &dock_pose) |
| Do initial perception, up to a timeout. More... | |
| bool | approachDock (Dock *dock, geometry_msgs::msg::PoseStamped &dock_pose) |
| Use control law and dock perception to approach the charge dock. More... | |
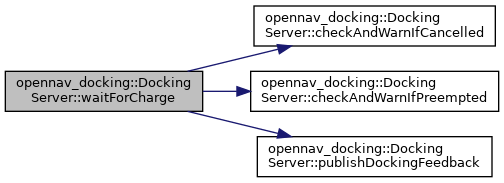
| bool | waitForCharge (Dock *dock) |
| Wait for charging to begin. More... | |
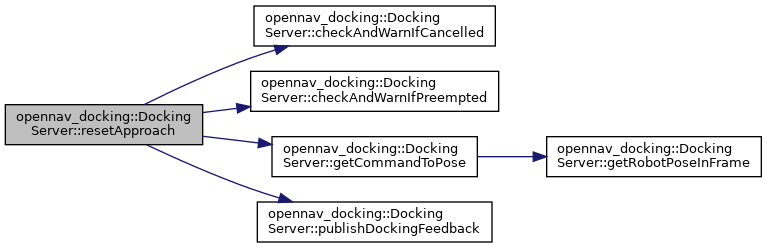
| bool | resetApproach (const geometry_msgs::msg::PoseStamped &staging_pose) |
| Reset the robot for another approach by controlling back to staging pose. More... | |
| bool | getCommandToPose (geometry_msgs::msg::Twist &cmd, const geometry_msgs::msg::PoseStamped &pose, double linear_tolerance, double angular_tolerance, bool is_docking, bool backward) |
| Run a single iteration of the control loop to approach a pose. More... | |
| virtual geometry_msgs::msg::PoseStamped | getRobotPoseInFrame (const std::string &frame) |
| Get the robot pose (aka base_frame pose) in another frame. More... | |
| template<typename ActionT > | |
| void | getPreemptedGoalIfRequested (typename std::shared_ptr< const typename ActionT::Goal > goal, const std::unique_ptr< nav2_util::SimpleActionServer< ActionT >> &action_server) |
| Gets a preempted goal if immediately requested. More... | |
| template<typename ActionT > | |
| bool | checkAndWarnIfCancelled (std::unique_ptr< nav2_util::SimpleActionServer< ActionT >> &action_server, const std::string &name) |
| Checks and logs warning if action canceled. More... | |
| template<typename ActionT > | |
| bool | checkAndWarnIfPreempted (std::unique_ptr< nav2_util::SimpleActionServer< ActionT >> &action_server, const std::string &name) |
| Checks and logs warning if action preempted. More... | |
| nav2_util::CallbackReturn | on_configure (const rclcpp_lifecycle::State &state) override |
| Configure member variables. More... | |
| nav2_util::CallbackReturn | on_activate (const rclcpp_lifecycle::State &state) override |
| Activate member variables. More... | |
| nav2_util::CallbackReturn | on_deactivate (const rclcpp_lifecycle::State &state) override |
| Deactivate member variables. More... | |
| nav2_util::CallbackReturn | on_cleanup (const rclcpp_lifecycle::State &state) override |
| Reset member variables. More... | |
| nav2_util::CallbackReturn | on_shutdown (const rclcpp_lifecycle::State &state) override |
| Called when in shutdown state. More... | |
| void | publishZeroVelocity () |
| Publish zero velocity at terminal condition. | |
 Public Member Functions inherited from nav2_util::LifecycleNode Public Member Functions inherited from nav2_util::LifecycleNode | |
| LifecycleNode (const std::string &node_name, const std::string &ns="", const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A lifecycle node constructor. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has no integer or floating point range constraints. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const floating_point_range fp_range, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has a floating point range constraint. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const integer_range int_range, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has an integer range constraint. More... | |
| std::shared_ptr< nav2_util::LifecycleNode > | shared_from_this () |
| Get a shared pointer of this. | |
| nav2_util::CallbackReturn | on_error (const rclcpp_lifecycle::State &) |
| Abstracted on_error state transition callback, since unimplemented as of 2020 in the managed ROS2 node state machine. More... | |
| void | autostart () |
| Automatically configure and active the node. | |
| virtual void | on_rcl_preshutdown () |
| Perform preshutdown activities before our Context is shutdown. Note that this is related to our Context's shutdown sequence, not the lifecycle node state machine. | |
| void | createBond () |
| Create bond connection to lifecycle manager. | |
| void | destroyBond () |
| Destroy bond connection to lifecycle manager. | |
Protected Member Functions | |
| void | dockRobot () |
| Main action callback method to complete docking request. | |
| void | undockRobot () |
| Main action callback method to complete undocking request. | |
| rcl_interfaces::msg::SetParametersResult | dynamicParametersCallback (std::vector< rclcpp::Parameter > parameters) |
| Callback executed when a parameter change is detected. More... | |
| Protected Member Functions inherited from nav2_util::LifecycleNode | |
| void | printLifecycleNodeNotification () |
| Print notifications for lifecycle node. | |
| void | register_rcl_preshutdown_callback () |
| void | runCleanups () |
Protected Attributes | |
| rclcpp::node_interfaces::OnSetParametersCallbackHandle::SharedPtr | dyn_params_handler_ |
| std::shared_ptr< std::mutex > | mutex_ |
| double | controller_frequency_ |
| double | initial_perception_timeout_ |
| double | wait_charge_timeout_ |
| double | dock_approach_timeout_ |
| double | undock_linear_tolerance_ |
| double | undock_angular_tolerance_ |
| int | max_retries_ |
| int | num_retries_ |
| std::string | base_frame_ |
| std::string | fixed_frame_ |
| bool | dock_backwards_ |
| double | dock_prestaging_tolerance_ |
| rclcpp::Time | action_start_time_ |
| std::unique_ptr< nav2_util::TwistPublisher > | vel_publisher_ |
| std::unique_ptr< DockingActionServer > | docking_action_server_ |
| std::unique_ptr< UndockingActionServer > | undocking_action_server_ |
| std::unique_ptr< DockDatabase > | dock_db_ |
| std::unique_ptr< Navigator > | navigator_ |
| std::unique_ptr< Controller > | controller_ |
| std::string | curr_dock_type_ |
| std::shared_ptr< tf2_ros::Buffer > | tf2_buffer_ |
| std::unique_ptr< tf2_ros::TransformListener > | tf2_listener_ |
| Protected Attributes inherited from nav2_util::LifecycleNode | |
| std::unique_ptr< rclcpp::PreShutdownCallbackHandle > | rcl_preshutdown_cb_handle_ {nullptr} |
| std::shared_ptr< bond::Bond > | bond_ {nullptr} |
| double | bond_heartbeat_period |
| rclcpp::TimerBase::SharedPtr | autostart_timer_ |
Detailed Description
An action server which implements charger docking node for AMRs.
Definition at line 43 of file docking_server.hpp.
Constructor & Destructor Documentation
◆ DockingServer()
|
explicit |
A constructor for opennav_docking::DockingServer.
- Parameters
-
options Additional options to control creation of the node.
Definition at line 27 of file docking_server.cpp.
Member Function Documentation
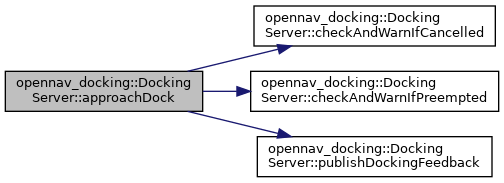
◆ approachDock()
| bool opennav_docking::DockingServer::approachDock | ( | Dock * | dock, |
| geometry_msgs::msg::PoseStamped & | dock_pose | ||
| ) |
Use control law and dock perception to approach the charge dock.
- Parameters
-
dock Dock instance, gets queried for refined pose and docked state. dock_pose Initial dock pose, will be refined by perception.
- Returns
- True if dock successfully approached, False if cancelled. For any internal error, will throw.
Definition at line 405 of file docking_server.cpp.
References checkAndWarnIfCancelled(), checkAndWarnIfPreempted(), and publishDockingFeedback().
Referenced by dockRobot().

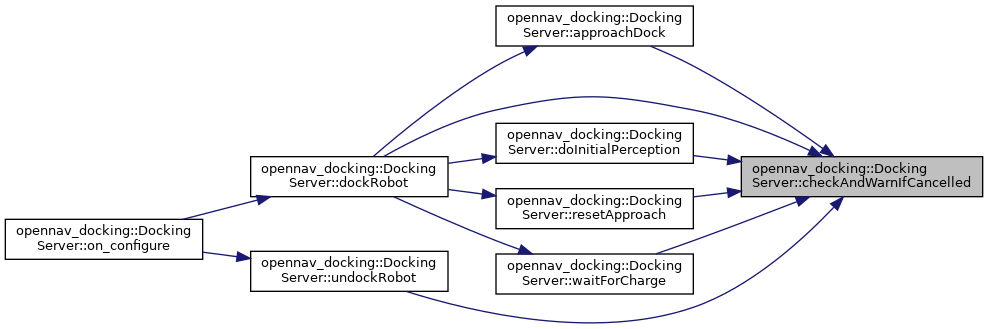
◆ checkAndWarnIfCancelled()
| bool opennav_docking::DockingServer::checkAndWarnIfCancelled | ( | std::unique_ptr< nav2_util::SimpleActionServer< ActionT >> & | action_server, |
| const std::string & | name | ||
| ) |
Checks and logs warning if action canceled.
- Parameters
-
action_server Action server to check for cancellation on name Name of action to put in warning message
- Returns
- True if action has been cancelled
Definition at line 179 of file docking_server.cpp.
Referenced by approachDock(), dockRobot(), doInitialPerception(), resetApproach(), undockRobot(), and waitForCharge().
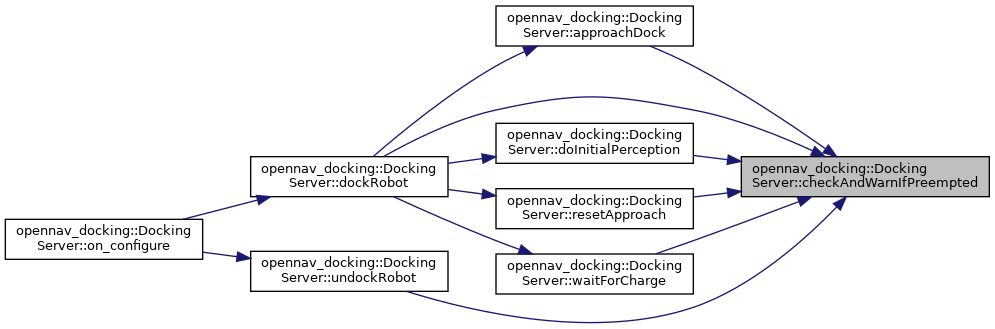
◆ checkAndWarnIfPreempted()
| bool opennav_docking::DockingServer::checkAndWarnIfPreempted | ( | std::unique_ptr< nav2_util::SimpleActionServer< ActionT >> & | action_server, |
| const std::string & | name | ||
| ) |
Checks and logs warning if action preempted.
- Parameters
-
action_server Action server to check for preemption on name Name of action to put in warning message
- Returns
- True if action has been preempted
Definition at line 191 of file docking_server.cpp.
Referenced by approachDock(), dockRobot(), doInitialPerception(), resetApproach(), undockRobot(), and waitForCharge().
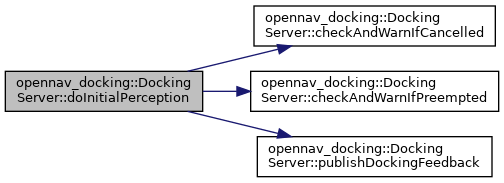
◆ doInitialPerception()
| void opennav_docking::DockingServer::doInitialPerception | ( | Dock * | dock, |
| geometry_msgs::msg::PoseStamped & | dock_pose | ||
| ) |
Do initial perception, up to a timeout.
- Parameters
-
dock Dock instance, gets queried for refined pose. dock_pose Initial dock pose, will be refined by perception.
Definition at line 384 of file docking_server.cpp.
References checkAndWarnIfCancelled(), checkAndWarnIfPreempted(), and publishDockingFeedback().
Referenced by dockRobot().

◆ dynamicParametersCallback()
|
protected |
Callback executed when a parameter change is detected.
- Parameters
-
event ParameterEvent message
Definition at line 719 of file docking_server.cpp.
Referenced by on_activate().

◆ generateGoalDock()
| Dock * opennav_docking::DockingServer::generateGoalDock | ( | std::shared_ptr< const DockRobot::Goal > | goal | ) |
Generate a dock from action goal.
- Parameters
-
goal Action goal
- Returns
- Raw dock pointer to manage;
Definition at line 374 of file docking_server.cpp.
Referenced by dockRobot().

◆ getCommandToPose()
| bool opennav_docking::DockingServer::getCommandToPose | ( | geometry_msgs::msg::Twist & | cmd, |
| const geometry_msgs::msg::PoseStamped & | pose, | ||
| double | linear_tolerance, | ||
| double | angular_tolerance, | ||
| bool | is_docking, | ||
| bool | backward | ||
| ) |
Run a single iteration of the control loop to approach a pose.
- Parameters
-
cmd The return command. pose The pose to command towards. linear_tolerance Pose is reached when linear distance is within this tolerance. angular_tolerance Pose is reached when angular distance is within this tolerance. is_docking If true, the robot is docking. If false, the robot is undocking. backward If true, the robot will drive backwards.
- Returns
- True if pose is reached.
Definition at line 538 of file docking_server.cpp.
References getRobotPoseInFrame().
Referenced by resetApproach(), and undockRobot().


◆ getPreemptedGoalIfRequested()
| void opennav_docking::DockingServer::getPreemptedGoalIfRequested | ( | typename std::shared_ptr< const typename ActionT::Goal > | goal, |
| const std::unique_ptr< nav2_util::SimpleActionServer< ActionT >> & | action_server | ||
| ) |
Gets a preempted goal if immediately requested.
- Parameters
-
Goal goal to check or replace if required with preemption action_server Action server to check for preemptions on
- Returns
- SUCCESS or FAILURE
Definition at line 169 of file docking_server.cpp.
Referenced by dockRobot(), and undockRobot().

◆ getRobotPoseInFrame()
|
virtual |
Get the robot pose (aka base_frame pose) in another frame.
- Parameters
-
frame The frame_id to get the robot pose in.
- Returns
- Computed robot pose, throws TF2 error if failure.
Definition at line 693 of file docking_server.cpp.
Referenced by dockRobot(), getCommandToPose(), and undockRobot().

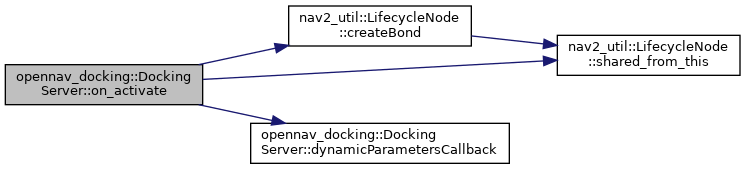
◆ on_activate()
|
override |
Activate member variables.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 101 of file docking_server.cpp.
References nav2_util::LifecycleNode::createBond(), dynamicParametersCallback(), and nav2_util::LifecycleNode::shared_from_this().
◆ on_cleanup()
|
override |
Reset member variables.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 147 of file docking_server.cpp.
Referenced by on_configure().

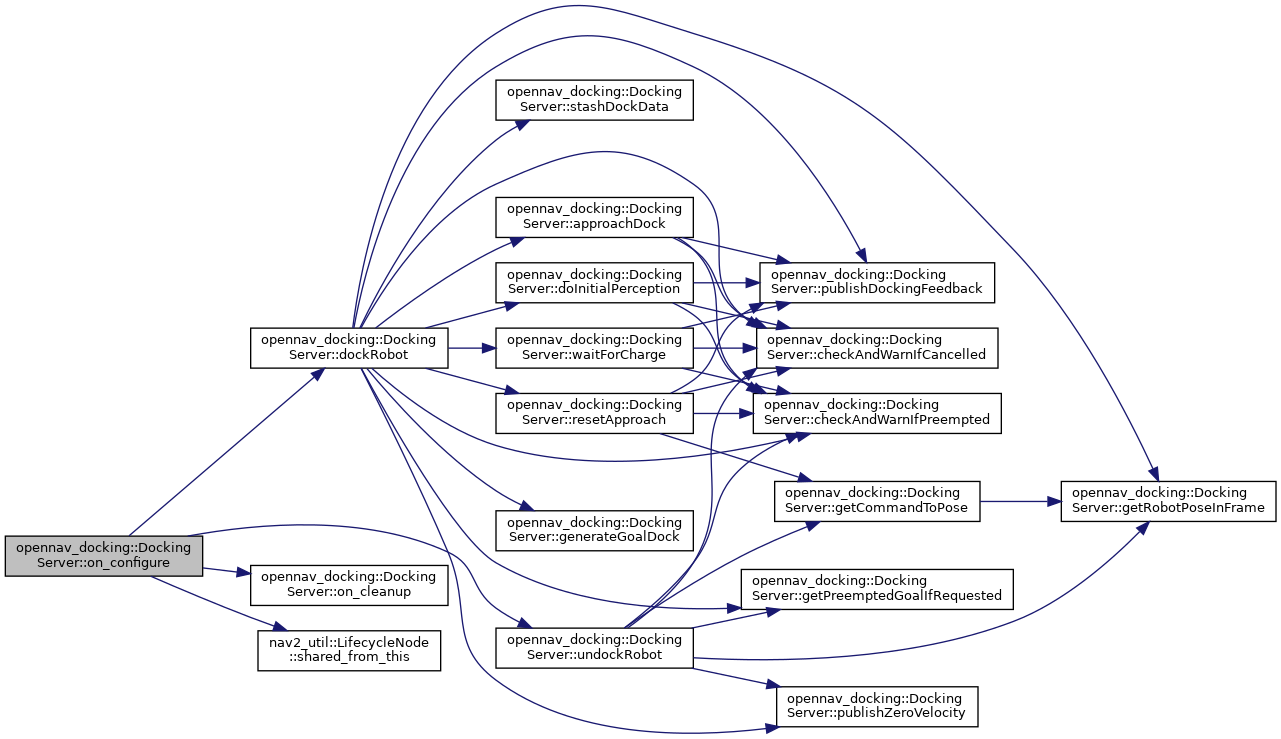
◆ on_configure()
|
override |
Configure member variables.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 46 of file docking_server.cpp.
References dockRobot(), on_cleanup(), nav2_util::LifecycleNode::shared_from_this(), and undockRobot().
◆ on_deactivate()
|
override |
Deactivate member variables.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 126 of file docking_server.cpp.
References nav2_util::LifecycleNode::destroyBond().

◆ on_shutdown()
|
override |
Called when in shutdown state.
- Parameters
-
state Reference to LifeCycle node state
- Returns
- SUCCESS or FAILURE
Definition at line 162 of file docking_server.cpp.
◆ publishDockingFeedback()
| void opennav_docking::DockingServer::publishDockingFeedback | ( | uint16_t | state | ) |
Publish feedback from a docking action.
- Parameters
-
state Current state - should be one of those defined in message.
Definition at line 709 of file docking_server.cpp.
Referenced by approachDock(), dockRobot(), doInitialPerception(), resetApproach(), and waitForCharge().
◆ resetApproach()
| bool opennav_docking::DockingServer::resetApproach | ( | const geometry_msgs::msg::PoseStamped & | staging_pose | ) |
Reset the robot for another approach by controlling back to staging pose.
- Parameters
-
staging_pose The target pose that will reset for another approach.
- Returns
- True if reset is successful.
Definition at line 503 of file docking_server.cpp.
References checkAndWarnIfCancelled(), checkAndWarnIfPreempted(), getCommandToPose(), and publishDockingFeedback().
Referenced by dockRobot().

◆ waitForCharge()
| bool opennav_docking::DockingServer::waitForCharge | ( | Dock * | dock | ) |
Wait for charging to begin.
- Parameters
-
dock Dock instance, used to query isCharging().
- Returns
- True if charging successfully started within alloted time.
Definition at line 471 of file docking_server.cpp.
References checkAndWarnIfCancelled(), checkAndWarnIfPreempted(), and publishDockingFeedback().
Referenced by dockRobot().

The documentation for this class was generated from the following files:
- nav2_docking/opennav_docking/include/opennav_docking/docking_server.hpp
- nav2_docking/opennav_docking/src/docking_server.cpp