Public Member Functions | |
| SmacPlannerLattice () | |
| constructor | |
| ~SmacPlannerLattice () | |
| destructor | |
| void | configure (const rclcpp_lifecycle::LifecycleNode::WeakPtr &parent, std::string name, std::shared_ptr< tf2_ros::Buffer > tf, std::shared_ptr< nav2_costmap_2d::Costmap2DROS > costmap_ros) override |
| Configuring plugin. More... | |
| void | cleanup () override |
| Cleanup lifecycle node. | |
| void | activate () override |
| Activate lifecycle node. | |
| void | deactivate () override |
| Deactivate lifecycle node. | |
| nav_msgs::msg::Path | createPlan (const geometry_msgs::msg::PoseStamped &start, const geometry_msgs::msg::PoseStamped &goal, std::function< bool()> cancel_checker) override |
| Creating a plan from start and goal poses. More... | |
 Public Member Functions inherited from nav2_core::GlobalPlanner Public Member Functions inherited from nav2_core::GlobalPlanner | |
| virtual | ~GlobalPlanner () |
| Virtual destructor. | |
Protected Member Functions | |
| rcl_interfaces::msg::SetParametersResult | dynamicParametersCallback (std::vector< rclcpp::Parameter > parameters) |
| Callback executed when a paramter change is detected. More... | |
Protected Attributes | |
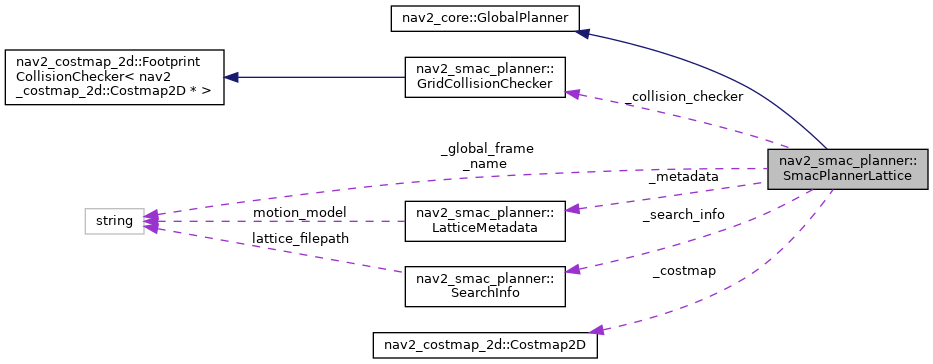
| std::unique_ptr< AStarAlgorithm< NodeLattice > > | _a_star |
| GridCollisionChecker | _collision_checker |
| std::unique_ptr< Smoother > | _smoother |
| rclcpp::Clock::SharedPtr | _clock |
| rclcpp::Logger | _logger {rclcpp::get_logger("SmacPlannerLattice")} |
| nav2_costmap_2d::Costmap2D * | _costmap |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | _costmap_ros |
| MotionModel | _motion_model |
| LatticeMetadata | _metadata |
| std::string | _global_frame |
| std::string | _name |
| SearchInfo | _search_info |
| bool | _allow_unknown |
| int | _max_iterations |
| int | _max_on_approach_iterations |
| int | _terminal_checking_interval |
| float | _tolerance |
| rclcpp_lifecycle::LifecyclePublisher< nav_msgs::msg::Path >::SharedPtr | _raw_plan_publisher |
| double | _max_planning_time |
| double | _lookup_table_size |
| bool | _debug_visualizations |
| rclcpp_lifecycle::LifecyclePublisher< visualization_msgs::msg::MarkerArray >::SharedPtr | _planned_footprints_publisher |
| rclcpp_lifecycle::LifecyclePublisher< visualization_msgs::msg::MarkerArray >::SharedPtr | _smoothed_footprints_publisher |
| rclcpp_lifecycle::LifecyclePublisher< geometry_msgs::msg::PoseArray >::SharedPtr | _expansions_publisher |
| std::mutex | _mutex |
| rclcpp_lifecycle::LifecycleNode::WeakPtr | _node |
| rclcpp::node_interfaces::OnSetParametersCallbackHandle::SharedPtr | _dyn_params_handler |
Additional Inherited Members | |
| Public Types inherited from nav2_core::GlobalPlanner | |
| using | Ptr = std::shared_ptr< GlobalPlanner > |
Detailed Description
Definition at line 39 of file smac_planner_lattice.hpp.
Member Function Documentation
◆ configure()
|
overridevirtual |
Configuring plugin.
- Parameters
-
parent Lifecycle node pointer name Name of plugin map tf Shared ptr of TF2 buffer costmap_ros Costmap2DROS object
Implements nav2_core::GlobalPlanner.
Definition at line 47 of file smac_planner_lattice.cpp.
References nav2_smac_planner::LatticeMotionTable::getLatticeMetadata(), and nav2_costmap_2d::Costmap2D::getResolution().
◆ createPlan()
|
overridevirtual |
Creating a plan from start and goal poses.
- Parameters
-
start Start pose goal Goal pose cancel_checker Function to check if the action has been canceled
- Returns
- nav2_msgs::Path of the generated path
Implements nav2_core::GlobalPlanner.
Definition at line 283 of file smac_planner_lattice.cpp.
References nav2_costmap_2d::Costmap2D::getResolution(), nav2_smac_planner::GridCollisionChecker::setFootprint(), and nav2_costmap_2d::Costmap2D::worldToMapContinuous().
◆ dynamicParametersCallback()
|
protected |
Callback executed when a paramter change is detected.
- Parameters
-
parameters list of changed parameters
Definition at line 506 of file smac_planner_lattice.cpp.
References nav2_smac_planner::SmootherParams::get(), nav2_smac_planner::LatticeMotionTable::getLatticeMetadata(), and nav2_costmap_2d::Costmap2D::getResolution().
Referenced by activate().

The documentation for this class was generated from the following files:
- nav2_smac_planner/include/nav2_smac_planner/smac_planner_lattice.hpp
- nav2_smac_planner/src/smac_planner_lattice.cpp