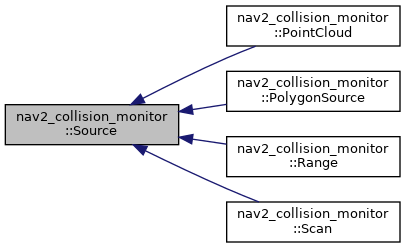
Basic data source class. More...
#include <nav2_collision_monitor/include/nav2_collision_monitor/source.hpp>
Public Member Functions | |
| Source (const nav2_util::LifecycleNode::WeakPtr &node, const std::string &source_name, const std::shared_ptr< tf2_ros::Buffer > tf_buffer, const std::string &base_frame_id, const std::string &global_frame_id, const tf2::Duration &transform_tolerance, const rclcpp::Duration &source_timeout, const bool base_shift_correction) | |
| Source constructor. More... | |
| virtual | ~Source () |
| Source destructor. | |
| virtual bool | getData (const rclcpp::Time &curr_time, std::vector< Point > &data)=0 |
| Adds latest data from source to the data array. Empty virtual method intended to be used in child implementations. More... | |
| bool | getEnabled () const |
| Obtains source enabled state. More... | |
| std::string | getSourceName () const |
| Obtains the name of the data source. More... | |
| rclcpp::Duration | getSourceTimeout () const |
| Obtains the source_timeout parameter of the data source. More... | |
Protected Member Functions | |
| bool | configure () |
| Source configuration routine. More... | |
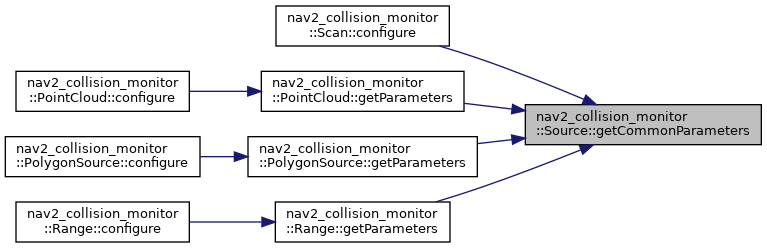
| void | getCommonParameters (std::string &source_topic) |
| Supporting routine obtaining ROS-parameters common for all data sources. More... | |
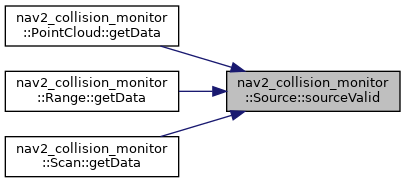
| bool | sourceValid (const rclcpp::Time &source_time, const rclcpp::Time &curr_time) const |
| Checks whether the source data might be considered as valid. More... | |
| rcl_interfaces::msg::SetParametersResult | dynamicParametersCallback (std::vector< rclcpp::Parameter > parameters) |
| Callback executed when a parameter change is detected. More... | |
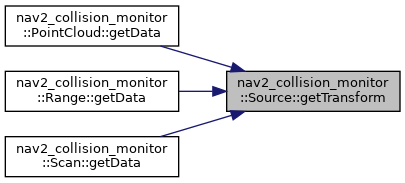
| bool | getTransform (const rclcpp::Time &curr_time, const std_msgs::msg::Header &data_header, tf2::Transform &tf_transform) const |
| Obtain the transform to get data from source frame and time where it was received to the base frame and current time (if base_shift_correction_ is true) or the transform without time shift considered which is less accurate but much more faster option not dependent on state estimation frames. More... | |
Protected Attributes | |
| nav2_util::LifecycleNode::WeakPtr | node_ |
| Collision Monitor node. | |
| rclcpp::Logger | logger_ {rclcpp::get_logger("collision_monitor")} |
| Collision monitor node logger stored for further usage. | |
| rclcpp::node_interfaces::OnSetParametersCallbackHandle::SharedPtr | dyn_params_handler_ |
| Dynamic parameters handler. | |
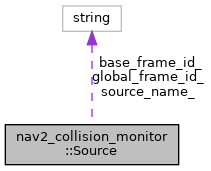
| std::string | source_name_ |
| Name of data source. | |
| std::shared_ptr< tf2_ros::Buffer > | tf_buffer_ |
| TF buffer. | |
| std::string | base_frame_id_ |
| Robot base frame ID. | |
| std::string | global_frame_id_ |
| Global frame ID for correct transform calculation. | |
| tf2::Duration | transform_tolerance_ |
| Transform tolerance. | |
| rclcpp::Duration | source_timeout_ |
| Maximum time interval in which data is considered valid. | |
| bool | base_shift_correction_ |
| Whether to correct source data towards to base frame movement, considering the difference between current time and latest source time. | |
| bool | enabled_ |
| Whether source is enabled. | |
Detailed Description
Basic data source class.
Definition at line 37 of file source.hpp.
Constructor & Destructor Documentation
◆ Source()
| nav2_collision_monitor::Source::Source | ( | const nav2_util::LifecycleNode::WeakPtr & | node, |
| const std::string & | source_name, | ||
| const std::shared_ptr< tf2_ros::Buffer > | tf_buffer, | ||
| const std::string & | base_frame_id, | ||
| const std::string & | global_frame_id, | ||
| const tf2::Duration & | transform_tolerance, | ||
| const rclcpp::Duration & | source_timeout, | ||
| const bool | base_shift_correction | ||
| ) |
Source constructor.
- Parameters
-
node Collision Monitor node pointer source_name Name of data source tf_buffer Shared pointer to a TF buffer base_frame_id Robot base frame ID. The output data will be transformed into this frame. global_frame_id Global frame ID for correct transform calculation transform_tolerance Transform tolerance source_timeout Maximum time interval in which data is considered valid base_shift_correction Whether to correct source data towards to base frame movement, considering the difference between current time and latest source time
Definition at line 27 of file source.cpp.
Member Function Documentation
◆ configure()
|
protected |
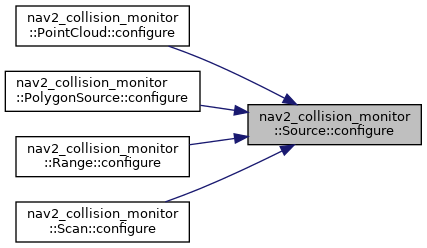
Source configuration routine.
- Returns
- True in case of everything is configured correctly, or false otherwise
Definition at line 47 of file source.cpp.
References dyn_params_handler_, dynamicParametersCallback(), and node_.
Referenced by nav2_collision_monitor::PointCloud::configure(), nav2_collision_monitor::PolygonSource::configure(), nav2_collision_monitor::Range::configure(), and nav2_collision_monitor::Scan::configure().

◆ dynamicParametersCallback()
|
protected |
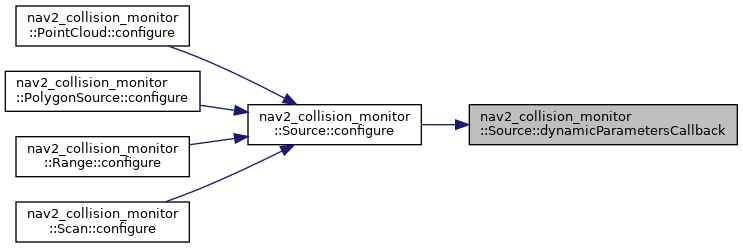
Callback executed when a parameter change is detected.
- Parameters
-
event ParameterEvent message
Definition at line 116 of file source.cpp.
References enabled_, and source_name_.
Referenced by configure().
◆ getCommonParameters()
|
protected |
Supporting routine obtaining ROS-parameters common for all data sources.
- Parameters
-
source_topic Output name of source subscription topic
Definition at line 58 of file source.cpp.
References enabled_, node_, source_name_, and source_timeout_.
Referenced by nav2_collision_monitor::Scan::configure(), nav2_collision_monitor::PointCloud::getParameters(), nav2_collision_monitor::PolygonSource::getParameters(), and nav2_collision_monitor::Range::getParameters().
◆ getData()
|
pure virtual |
Adds latest data from source to the data array. Empty virtual method intended to be used in child implementations.
- Parameters
-
curr_time Current node time for data interpolation data Array where the data from source to be added. Added data is transformed to base_frame_id_ coordinate system at curr_time.
- Returns
- false if an invalid source should block the robot
Implemented in nav2_collision_monitor::Scan, nav2_collision_monitor::Range, nav2_collision_monitor::PolygonSource, and nav2_collision_monitor::PointCloud.
◆ getEnabled()
| bool nav2_collision_monitor::Source::getEnabled | ( | ) | const |
Obtains source enabled state.
- Returns
- Whether source is enabled
Definition at line 100 of file source.cpp.
References enabled_.
◆ getSourceName()
| std::string nav2_collision_monitor::Source::getSourceName | ( | ) | const |
Obtains the name of the data source.
- Returns
- Name of the data source
Definition at line 105 of file source.cpp.
References source_name_.
◆ getSourceTimeout()
| rclcpp::Duration nav2_collision_monitor::Source::getSourceTimeout | ( | ) | const |
Obtains the source_timeout parameter of the data source.
- Returns
- source_timeout parameter value of the data source
Definition at line 110 of file source.cpp.
References source_timeout_.
◆ getTransform()
|
protected |
Obtain the transform to get data from source frame and time where it was received to the base frame and current time (if base_shift_correction_ is true) or the transform without time shift considered which is less accurate but much more faster option not dependent on state estimation frames.
- Parameters
-
curr_time Current node time data_header Current header which contains the frame_id and the stamp tf_transform Output source->base_frame_id_ transform
- Returns
- True if got correct transform, otherwise false
Definition at line 135 of file source.cpp.
References base_frame_id_, base_shift_correction_, global_frame_id_, tf_buffer_, and transform_tolerance_.
Referenced by nav2_collision_monitor::PointCloud::getData(), nav2_collision_monitor::Range::getData(), and nav2_collision_monitor::Scan::getData().
◆ sourceValid()
|
protected |
Checks whether the source data might be considered as valid.
- Parameters
-
source_time Timestamp of latest obtained data curr_time Current node time for source verification
- Returns
- True if data source is valid, otherwise false
Definition at line 81 of file source.cpp.
References logger_, source_name_, and source_timeout_.
Referenced by nav2_collision_monitor::PointCloud::getData(), nav2_collision_monitor::Range::getData(), and nav2_collision_monitor::Scan::getData().
The documentation for this class was generated from the following files:
- nav2_collision_monitor/include/nav2_collision_monitor/source.hpp
- nav2_collision_monitor/src/source.cpp