Main algorithm optimizer of the MPPI Controller. More...
#include <nav2_mppi_controller/include/nav2_mppi_controller/optimizer.hpp>
Public Member Functions | |
| Optimizer ()=default | |
| Constructor for mppi::Optimizer. | |
| ~Optimizer () | |
| Destructor for mppi::Optimizer. | |
| void | initialize (rclcpp_lifecycle::LifecycleNode::WeakPtr parent, const std::string &name, std::shared_ptr< nav2_costmap_2d::Costmap2DROS > costmap_ros, ParametersHandler *dynamic_parameters_handler) |
| Initializes optimizer on startup. More... | |
| void | shutdown () |
| Shutdown for optimizer at process end. | |
| geometry_msgs::msg::TwistStamped | evalControl (const geometry_msgs::msg::PoseStamped &robot_pose, const geometry_msgs::msg::Twist &robot_speed, const nav_msgs::msg::Path &plan, const geometry_msgs::msg::Pose &goal, nav2_core::GoalChecker *goal_checker) |
| Compute control using MPPI algorithm. More... | |
| models::Trajectories & | getGeneratedTrajectories () |
| Get the trajectories generated in a cycle for visualization. More... | |
| xt::xtensor< float, 2 > | getOptimizedTrajectory () |
| Get the optimal trajectory for a cycle for visualization. More... | |
| void | setSpeedLimit (double speed_limit, bool percentage) |
| Set the maximum speed based on the speed limits callback. More... | |
| void | reset (bool reset_dynamic_speed_limits=true) |
| Reset the optimization problem to initial conditions. More... | |
Protected Member Functions | |
| void | optimize () |
| Main function to generate, score, and return trajectories. | |
| void | prepare (const geometry_msgs::msg::PoseStamped &robot_pose, const geometry_msgs::msg::Twist &robot_speed, const nav_msgs::msg::Path &plan, const geometry_msgs::msg::Pose &goal, nav2_core::GoalChecker *goal_checker) |
| Prepare state information on new request for trajectory rollouts. More... | |
| void | getParams () |
| Obtain the main controller's parameters. | |
| void | setMotionModel (const std::string &model) |
| Set the motion model of the vehicle platform. More... | |
| void | shiftControlSequence () |
| Shift the optimal control sequence after processing for next iterations initial conditions after execution. | |
| void | generateNoisedTrajectories () |
| updates generated trajectories with noised trajectories from the last cycle's optimal control | |
| void | applyControlSequenceConstraints () |
| Apply hard vehicle constraints on control sequence. | |
| void | updateStateVelocities (models::State &state) const |
| Update velocities in state. More... | |
| void | updateInitialStateVelocities (models::State &state) const |
| Update initial velocity in state. More... | |
| void | propagateStateVelocitiesFromInitials (models::State &state) const |
| predict velocities in state using model for time horizon equal to timesteps More... | |
| void | integrateStateVelocities (models::Trajectories &trajectories, const models::State &state) const |
| Rollout velocities in state to poses. More... | |
| void | integrateStateVelocities (xt::xtensor< float, 2 > &trajectories, const xt::xtensor< float, 2 > &state) const |
| Rollout velocities in state to poses. More... | |
| void | updateControlSequence () |
| Update control sequence with state controls weighted by costs using softmax function. | |
| geometry_msgs::msg::TwistStamped | getControlFromSequenceAsTwist (const builtin_interfaces::msg::Time &stamp) |
| Convert control sequence to a twist commant. More... | |
| bool | isHolonomic () const |
| Whether the motion model is holonomic. More... | |
| void | setOffset (double controller_frequency) |
| Using control frequence and time step size, determine if trajectory offset should be used to populate initial state of the next cycle. | |
| bool | fallback (bool fail) |
| Perform fallback behavior to try to recover from a set of trajectories in collision. More... | |
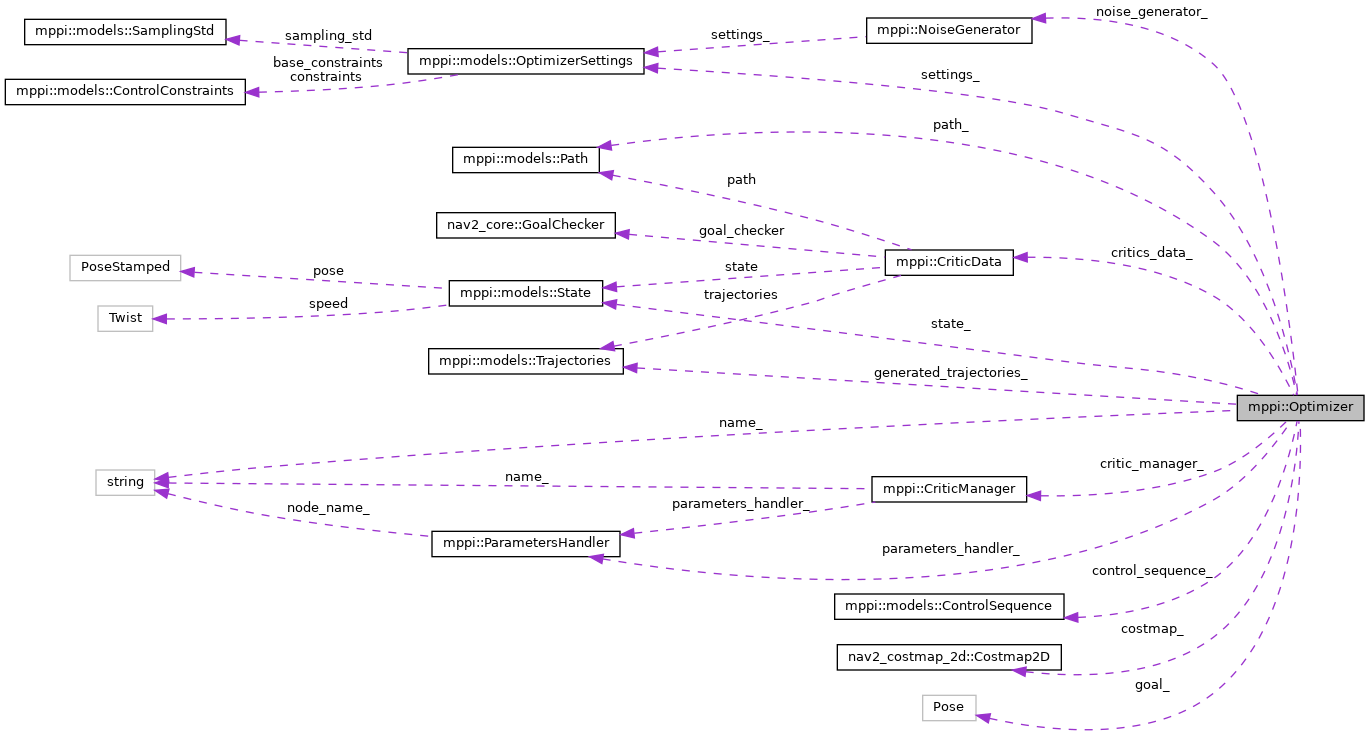
Protected Attributes | |
| rclcpp_lifecycle::LifecycleNode::WeakPtr | parent_ |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap_ros_ |
| nav2_costmap_2d::Costmap2D * | costmap_ |
| std::string | name_ |
| std::shared_ptr< MotionModel > | motion_model_ |
| ParametersHandler * | parameters_handler_ |
| CriticManager | critic_manager_ |
| NoiseGenerator | noise_generator_ |
| models::OptimizerSettings | settings_ |
| models::State | state_ |
| models::ControlSequence | control_sequence_ |
| std::array< mppi::models::Control, 4 > | control_history_ |
| models::Trajectories | generated_trajectories_ |
| models::Path | path_ |
| geometry_msgs::msg::Pose | goal_ |
| xt::xtensor< float, 1 > | costs_ |
| CriticData | critics_data_ |
| rclcpp::Logger | logger_ {rclcpp::get_logger("MPPIController")} |
| Caution, keep references. | |
Detailed Description
Main algorithm optimizer of the MPPI Controller.
Definition at line 57 of file optimizer.hpp.
Member Function Documentation
◆ evalControl()
| geometry_msgs::msg::TwistStamped mppi::Optimizer::evalControl | ( | const geometry_msgs::msg::PoseStamped & | robot_pose, |
| const geometry_msgs::msg::Twist & | robot_speed, | ||
| const nav_msgs::msg::Path & | plan, | ||
| const geometry_msgs::msg::Pose & | goal, | ||
| nav2_core::GoalChecker * | goal_checker | ||
| ) |
Compute control using MPPI algorithm.
- Parameters
-
robot_pose Pose of the robot at given time robot_speed Speed of the robot at given time plan Path plan to track goal_checker Object to check if goal is completed
- Returns
- TwistStamped of the MPPI control
Definition at line 164 of file optimizer.cpp.
Referenced by nav2_mppi_controller::MPPIController::computeVelocityCommands().

◆ fallback()
|
protected |
Perform fallback behavior to try to recover from a set of trajectories in collision.
- Parameters
-
fail Whether the system failed to recover from
Definition at line 196 of file optimizer.cpp.
◆ getControlFromSequenceAsTwist()
|
protected |
Convert control sequence to a twist commant.
- Parameters
-
stamp Timestamp to use
- Returns
- TwistStamped of command to send to robot base
Definition at line 448 of file optimizer.cpp.
◆ getGeneratedTrajectories()
| models::Trajectories & mppi::Optimizer::getGeneratedTrajectories | ( | ) |
Get the trajectories generated in a cycle for visualization.
- Returns
- Set of trajectories evaluated in cycle
Definition at line 508 of file optimizer.cpp.
Referenced by nav2_mppi_controller::MPPIController::visualize().

◆ getOptimizedTrajectory()
| xt::xtensor< float, 2 > mppi::Optimizer::getOptimizedTrajectory | ( | ) |
Get the optimal trajectory for a cycle for visualization.
- Returns
- Optimal trajectory
Definition at line 395 of file optimizer.cpp.
Referenced by nav2_mppi_controller::MPPIController::visualize().

◆ initialize()
| void mppi::Optimizer::initialize | ( | rclcpp_lifecycle::LifecycleNode::WeakPtr | parent, |
| const std::string & | name, | ||
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap_ros, | ||
| ParametersHandler * | dynamic_parameters_handler | ||
| ) |
Initializes optimizer on startup.
- Parameters
-
parent WeakPtr to node name Name of plugin costmap_ros Costmap2DROS object of environment dynamic_parameter_handler Parameter handler object
Definition at line 36 of file optimizer.cpp.
Referenced by nav2_mppi_controller::MPPIController::configure().

◆ integrateStateVelocities() [1/2]
|
protected |
Rollout velocities in state to poses.
- Parameters
-
trajectories to rollout state fill state
Definition at line 367 of file optimizer.cpp.
◆ integrateStateVelocities() [2/2]
|
protected |
Rollout velocities in state to poses.
- Parameters
-
trajectories to rollout state fill state
Definition at line 334 of file optimizer.cpp.
◆ isHolonomic()
|
protected |
Whether the motion model is holonomic.
- Returns
- Bool if holonomic to populate
yaxis of state
Definition at line 159 of file optimizer.cpp.
◆ prepare()
|
protected |
Prepare state information on new request for trajectory rollouts.
- Parameters
-
robot_pose Pose of the robot at given time robot_speed Speed of the robot at given time plan Path plan to track goal_checker Object to check if goal is completed
Definition at line 215 of file optimizer.cpp.
◆ propagateStateVelocitiesFromInitials()
|
protected |
predict velocities in state using model for time horizon equal to timesteps
- Parameters
-
state fill state
Definition at line 328 of file optimizer.cpp.
◆ reset()
| void mppi::Optimizer::reset | ( | bool | reset_dynamic_speed_limits = true | ) |
Reset the optimization problem to initial conditions.
- Parameters
-
Whether to reset the constraints to its base values
Definition at line 137 of file optimizer.cpp.
Referenced by nav2_mppi_controller::MPPIController::reset().

◆ setMotionModel()
|
protected |
Set the motion model of the vehicle platform.
- Parameters
-
model Model string to use
Definition at line 464 of file optimizer.cpp.
◆ setSpeedLimit()
| void mppi::Optimizer::setSpeedLimit | ( | double | speed_limit, |
| bool | percentage | ||
| ) |
Set the maximum speed based on the speed limits callback.
- Parameters
-
speed_limit Limit of the speed for use percentage Whether the speed limit is absolute or relative
Definition at line 481 of file optimizer.cpp.
Referenced by nav2_mppi_controller::MPPIController::setSpeedLimit().

◆ updateInitialStateVelocities()
|
protected |
Update initial velocity in state.
- Parameters
-
state fill state
Definition at line 317 of file optimizer.cpp.
◆ updateStateVelocities()
|
protected |
Update velocities in state.
- Parameters
-
state fill state with velocities on each step
Definition at line 310 of file optimizer.cpp.
Member Data Documentation
◆ critics_data_
|
protected |
Definition at line 264 of file optimizer.hpp.
The documentation for this class was generated from the following files:
- nav2_mppi_controller/include/nav2_mppi_controller/optimizer.hpp
- nav2_mppi_controller/src/optimizer.cpp