A table of motion primitives and related functions. More...
#include <nav2_smac_planner/include/nav2_smac_planner/node_lattice.hpp>
Public Member Functions | |
| LatticeMotionTable () | |
| A constructor for nav2_smac_planner::LatticeMotionTable. | |
| void | initMotionModel (unsigned int &size_x_in, SearchInfo &search_info) |
| Initializing state lattice planner's motion model. More... | |
| MotionPrimitivePtrs | getMotionPrimitives (const NodeLattice *node) |
| Get projections of motion models. More... | |
| unsigned int | getClosestAngularBin (const double &theta) |
| Get the angular bin to use from a raw orientation. More... | |
| float & | getAngleFromBin (const unsigned int &bin_idx) |
| Get the raw orientation from an angular bin. More... | |
Static Public Member Functions | |
| static LatticeMetadata | getLatticeMetadata (const std::string &lattice_filepath) |
| Get file metadata needed. More... | |
Public Attributes | |
| unsigned int | size_x |
| unsigned int | num_angle_quantization |
| float | change_penalty |
| float | non_straight_penalty |
| float | cost_penalty |
| float | reverse_penalty |
| float | travel_distance_reward |
| float | rotation_penalty |
| bool | allow_reverse_expansion |
| std::vector< std::vector< MotionPrimitive > > | motion_primitives |
| ompl::base::StateSpacePtr | state_space |
| std::vector< TrigValues > | trig_values |
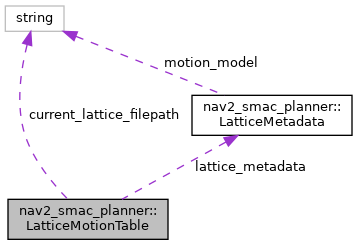
| std::string | current_lattice_filepath |
| LatticeMetadata | lattice_metadata |
Detailed Description
A table of motion primitives and related functions.
Definition at line 51 of file node_lattice.hpp.
Member Function Documentation
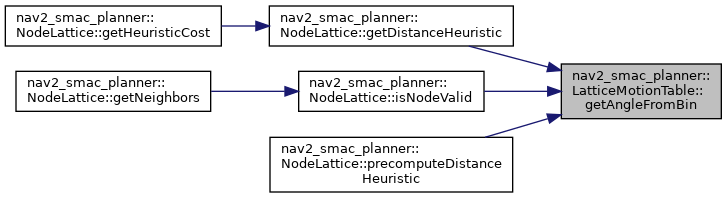
◆ getAngleFromBin()
| float & nav2_smac_planner::LatticeMotionTable::getAngleFromBin | ( | const unsigned int & | bin_idx | ) |
Get the raw orientation from an angular bin.
- Parameters
-
bin_idx Index of the bin
- Returns
- Raw orientation in radians
Definition at line 170 of file node_lattice.cpp.
Referenced by nav2_smac_planner::NodeLattice::getDistanceHeuristic(), nav2_smac_planner::NodeLattice::isNodeValid(), and nav2_smac_planner::NodeLattice::precomputeDistanceHeuristic().
◆ getClosestAngularBin()
| unsigned int nav2_smac_planner::LatticeMotionTable::getClosestAngularBin | ( | const double & | theta | ) |
Get the angular bin to use from a raw orientation.
- Parameters
-
theta Angle in radians
- Returns
- bin index of closest angle to request
Definition at line 155 of file node_lattice.cpp.
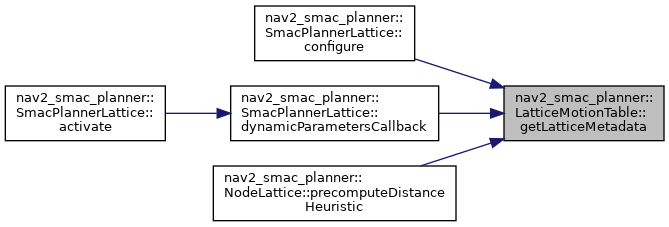
◆ getLatticeMetadata()
|
static |
Get file metadata needed.
- Parameters
-
lattice_filepath Filepath to the lattice file
- Returns
- A set of metadata containing the number of angular bins and the global coordinates minimum turning radius of the primitives for use in analytic expansion and heuristic calculation.
Definition at line 141 of file node_lattice.cpp.
Referenced by nav2_smac_planner::SmacPlannerLattice::configure(), nav2_smac_planner::SmacPlannerLattice::dynamicParametersCallback(), and nav2_smac_planner::NodeLattice::precomputeDistanceHeuristic().
◆ getMotionPrimitives()
| MotionPrimitivePtrs nav2_smac_planner::LatticeMotionTable::getMotionPrimitives | ( | const NodeLattice * | node | ) |
Get projections of motion models.
- Parameters
-
node Ptr to NodeLattice
- Returns
- A set of motion poses
Definition at line 114 of file node_lattice.cpp.
Referenced by nav2_smac_planner::NodeLattice::getNeighbors().

◆ initMotionModel()
| void nav2_smac_planner::LatticeMotionTable::initMotionModel | ( | unsigned int & | size_x_in, |
| SearchInfo & | search_info | ||
| ) |
Initializing state lattice planner's motion model.
- Parameters
-
size_x_in Size of costmap in X search_info Parameters for searching
Definition at line 48 of file node_lattice.cpp.
The documentation for this struct was generated from the following files:
- nav2_smac_planner/include/nav2_smac_planner/node_lattice.hpp
- nav2_smac_planner/src/node_lattice.cpp