Public Member Functions | |
| MPPIController ()=default | |
| Constructor for mppi::MPPIController. | |
| void | configure (const rclcpp_lifecycle::LifecycleNode::WeakPtr &parent, std::string name, const std::shared_ptr< tf2_ros::Buffer > tf, const std::shared_ptr< nav2_costmap_2d::Costmap2DROS > costmap_ros) override |
| Configure controller on bringup. More... | |
| void | cleanup () override |
| Cleanup resources. | |
| void | activate () override |
| Activate controller. | |
| void | deactivate () override |
| Deactivate controller. | |
| void | reset () |
| Reset the controller state between tasks. | |
| geometry_msgs::msg::TwistStamped | computeVelocityCommands (const geometry_msgs::msg::PoseStamped &robot_pose, const geometry_msgs::msg::Twist &robot_speed, nav2_core::GoalChecker *goal_checker) override |
| Main method to compute velocities using the optimizer. More... | |
| void | setPlan (const nav_msgs::msg::Path &path) override |
| Set new reference path to track. More... | |
| void | setSpeedLimit (const double &speed_limit, const bool &percentage) override |
| Set new speed limit from callback. More... | |
 Public Member Functions inherited from nav2_core::Controller Public Member Functions inherited from nav2_core::Controller | |
| virtual | ~Controller () |
| Virtual destructor. | |
Protected Member Functions | |
| void | visualize (nav_msgs::msg::Path transformed_plan) |
| Visualize trajectories. More... | |
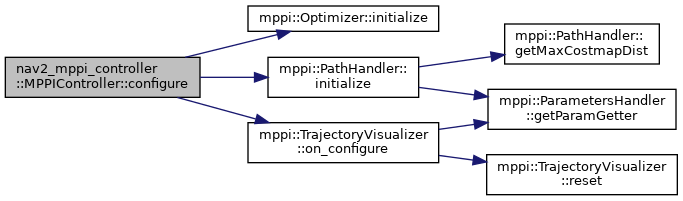
Protected Attributes | |
| std::string | name_ |
| rclcpp_lifecycle::LifecycleNode::WeakPtr | parent_ |
| rclcpp::Clock::SharedPtr | clock_ |
| rclcpp::Logger | logger_ {rclcpp::get_logger("MPPIController")} |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap_ros_ |
| std::shared_ptr< tf2_ros::Buffer > | tf_buffer_ |
| std::unique_ptr< ParametersHandler > | parameters_handler_ |
| Optimizer | optimizer_ |
| PathHandler | path_handler_ |
| TrajectoryVisualizer | trajectory_visualizer_ |
| bool | visualize_ |
| double | reset_period_ |
| rclcpp::Time | last_time_called_ |
Additional Inherited Members | |
| Public Types inherited from nav2_core::Controller | |
| using | Ptr = std::shared_ptr< nav2_core::Controller > |
Detailed Description
Definition at line 40 of file controller.hpp.
Member Function Documentation
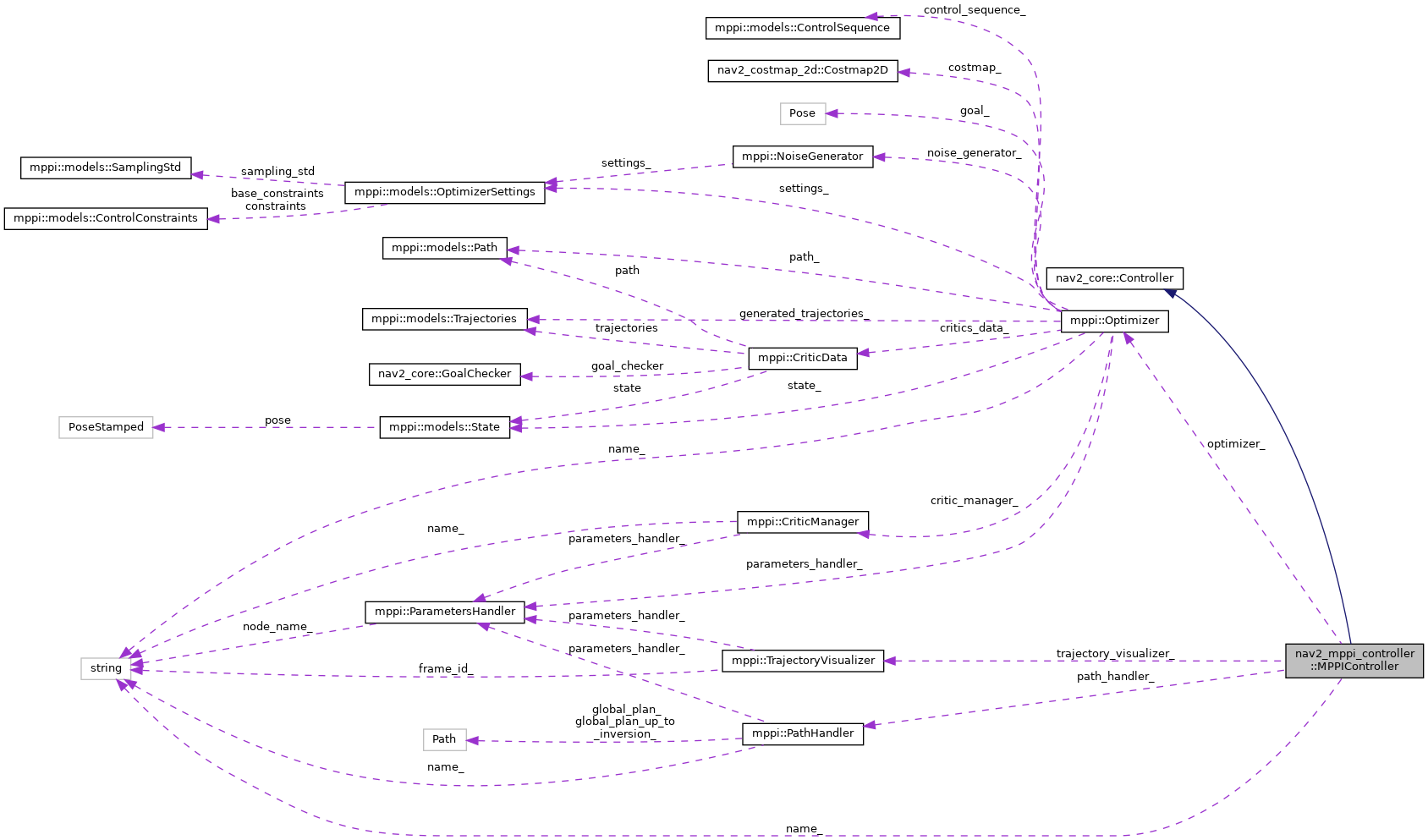
◆ computeVelocityCommands()
|
overridevirtual |
Main method to compute velocities using the optimizer.
- Parameters
-
robot_pose Robot pose robot_speed Robot speed goal_checker Pointer to the goal checker for awareness if completed task
Implements nav2_core::Controller.
Definition at line 80 of file controller.cpp.
References mppi::Optimizer::evalControl(), reset(), mppi::PathHandler::transformPath(), and visualize().
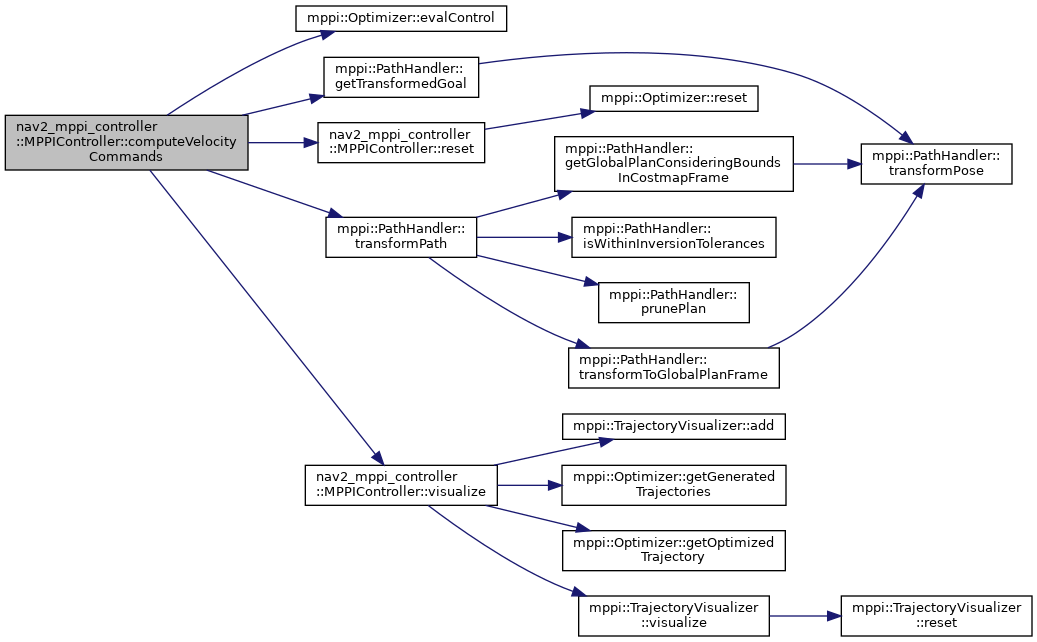
◆ configure()
|
overridevirtual |
Configure controller on bringup.
- Parameters
-
parent WeakPtr to node name Name of plugin tf TF buffer to use costmap_ros Costmap2DROS object of environment
Implements nav2_core::Controller.
Definition at line 25 of file controller.cpp.
References mppi::Optimizer::initialize(), mppi::PathHandler::initialize(), and mppi::TrajectoryVisualizer::on_configure().
◆ setPlan()
|
overridevirtual |
Set new reference path to track.
- Parameters
-
path Path to track
Implements nav2_core::Controller.
Definition at line 123 of file controller.cpp.
References mppi::PathHandler::setPath().

◆ setSpeedLimit()
|
overridevirtual |
Set new speed limit from callback.
- Parameters
-
speed_limit Speed limit to use percentage Bool if the speed limit is absolute or relative
Implements nav2_core::Controller.
Definition at line 128 of file controller.cpp.
References mppi::Optimizer::setSpeedLimit().

◆ visualize()
|
protected |
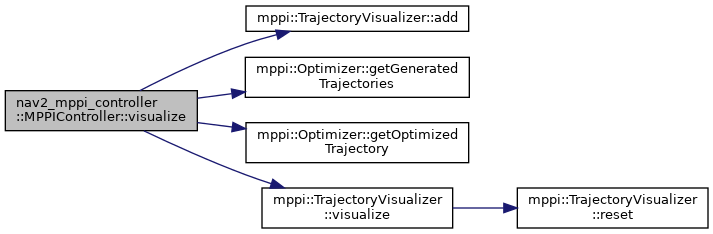
Visualize trajectories.
- Parameters
-
transformed_plan Transformed input plan
Definition at line 116 of file controller.cpp.
References mppi::TrajectoryVisualizer::add(), mppi::Optimizer::getGeneratedTrajectories(), mppi::Optimizer::getOptimizedTrajectory(), and mppi::TrajectoryVisualizer::visualize().
Referenced by computeVelocityCommands().

The documentation for this class was generated from the following files:
- nav2_mppi_controller/include/nav2_mppi_controller/controller.hpp
- nav2_mppi_controller/src/controller.cpp