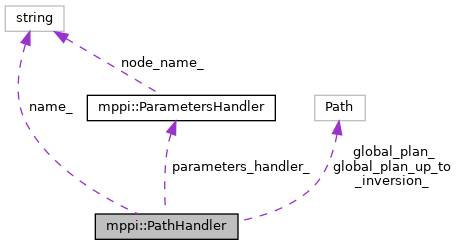
Manager of incoming reference paths for transformation and processing. More...
#include <nav2_mppi_controller/include/nav2_mppi_controller/tools/path_handler.hpp>
Public Member Functions | |
| PathHandler ()=default | |
| Constructor for mppi::PathHandler. | |
| ~PathHandler ()=default | |
| Destructor for mppi::PathHandler. | |
| void | initialize (rclcpp_lifecycle::LifecycleNode::WeakPtr parent, const std::string &name, std::shared_ptr< nav2_costmap_2d::Costmap2DROS >, std::shared_ptr< tf2_ros::Buffer >, ParametersHandler *) |
| Initialize path handler on bringup. More... | |
| void | setPath (const nav_msgs::msg::Path &plan) |
| Set new reference path. More... | |
| nav_msgs::msg::Path & | getPath () |
| Get reference path. More... | |
| nav_msgs::msg::Path | transformPath (const geometry_msgs::msg::PoseStamped &robot_pose) |
| transform global plan to local applying constraints, then prune global plan More... | |
Protected Member Functions | |
| bool | transformPose (const std::string &frame, const geometry_msgs::msg::PoseStamped &in_pose, geometry_msgs::msg::PoseStamped &out_pose) const |
| Transform a pose to another frame. More... | |
| double | getMaxCostmapDist () |
| Get largest dimension of costmap (radially) More... | |
| geometry_msgs::msg::PoseStamped | transformToGlobalPlanFrame (const geometry_msgs::msg::PoseStamped &pose) |
| Transform a pose to the global reference frame. More... | |
| std::pair< nav_msgs::msg::Path, PathIterator > | getGlobalPlanConsideringBoundsInCostmapFrame (const geometry_msgs::msg::PoseStamped &global_pose) |
| Get global plan within window of the local costmap size. More... | |
| void | prunePlan (nav_msgs::msg::Path &plan, const PathIterator end) |
| Prune a path to only interesting portions. More... | |
| bool | isWithinInversionTolerances (const geometry_msgs::msg::PoseStamped &robot_pose) |
| Check if the robot pose is within the set inversion tolerances. More... | |
Protected Attributes | |
| std::string | name_ |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap_ |
| std::shared_ptr< tf2_ros::Buffer > | tf_buffer_ |
| ParametersHandler * | parameters_handler_ |
| nav_msgs::msg::Path | global_plan_ |
| nav_msgs::msg::Path | global_plan_up_to_inversion_ |
| rclcpp::Logger | logger_ {rclcpp::get_logger("MPPIController")} |
| double | max_robot_pose_search_dist_ {0} |
| double | prune_distance_ {0} |
| double | transform_tolerance_ {0} |
| float | inversion_xy_tolerance_ {0.2} |
| float | inversion_yaw_tolerance {0.4} |
| bool | enforce_path_inversion_ {false} |
| unsigned int | inversion_locale_ {0u} |
Detailed Description
Manager of incoming reference paths for transformation and processing.
Definition at line 46 of file path_handler.hpp.
Member Function Documentation
◆ getGlobalPlanConsideringBoundsInCostmapFrame()
|
protected |
Get global plan within window of the local costmap size.
- Parameters
-
global_pose Robot pose
- Returns
- plan transformed in the costmap frame and iterator to the first pose of the global plan (for pruning)
Definition at line 49 of file path_handler.cpp.
References transformPose().
Referenced by transformPath().


◆ getMaxCostmapDist()
|
protected |
Get largest dimension of costmap (radially)
- Returns
- Max distance from center of costmap to edge
Definition at line 166 of file path_handler.cpp.
Referenced by initialize().

◆ getPath()
| nav_msgs::msg::Path & mppi::PathHandler::getPath | ( | ) |
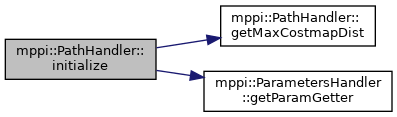
◆ initialize()
| void mppi::PathHandler::initialize | ( | rclcpp_lifecycle::LifecycleNode::WeakPtr | parent, |
| const std::string & | name, | ||
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap, | ||
| std::shared_ptr< tf2_ros::Buffer > | buffer, | ||
| ParametersHandler * | param_handler | ||
| ) |
Initialize path handler on bringup.
- Parameters
-
parent WeakPtr to node name Name of plugin costmap_ros Costmap2DROS object of environment tf TF buffer for transformations dynamic_parameter_handler Parameter handler object
Definition at line 24 of file path_handler.cpp.
References getMaxCostmapDist(), and mppi::ParametersHandler::getParamGetter().
Referenced by nav2_mppi_controller::MPPIController::configure().

◆ isWithinInversionTolerances()
|
protected |
Check if the robot pose is within the set inversion tolerances.
- Parameters
-
robot_pose Robot's current pose to check
- Returns
- bool If the robot pose is within the set inversion tolerances
Definition at line 189 of file path_handler.cpp.
Referenced by transformPath().

◆ prunePlan()
|
protected |
Prune a path to only interesting portions.
- Parameters
-
plan Plan to prune end Final path iterator
Definition at line 184 of file path_handler.cpp.
Referenced by transformPath().

◆ setPath()
| void mppi::PathHandler::setPath | ( | const nav_msgs::msg::Path & | plan | ) |
Set new reference path.
- Parameters
-
Plan Path to use
Definition at line 173 of file path_handler.cpp.
Referenced by nav2_mppi_controller::MPPIController::setPlan().

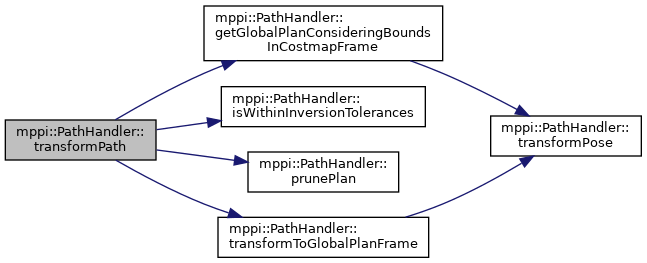
◆ transformPath()
| nav_msgs::msg::Path mppi::PathHandler::transformPath | ( | const geometry_msgs::msg::PoseStamped & | robot_pose | ) |
transform global plan to local applying constraints, then prune global plan
- Parameters
-
robot_pose Pose of robot
- Returns
- global plan in local frame
Definition at line 120 of file path_handler.cpp.
References getGlobalPlanConsideringBoundsInCostmapFrame(), isWithinInversionTolerances(), prunePlan(), and transformToGlobalPlanFrame().
Referenced by nav2_mppi_controller::MPPIController::computeVelocityCommands().

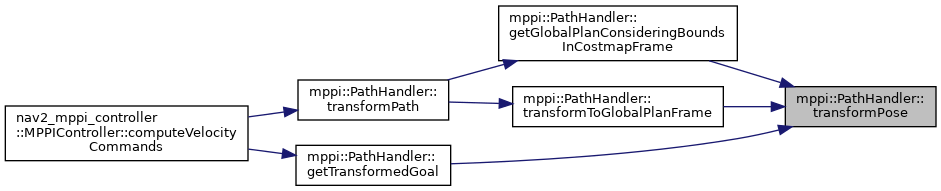
◆ transformPose()
|
protected |
Transform a pose to another frame.
- Parameters
-
frame Frame to transform to in_pose Input pose out_pose Output pose
- Returns
- Bool if successful
Definition at line 145 of file path_handler.cpp.
Referenced by getGlobalPlanConsideringBoundsInCostmapFrame(), and transformToGlobalPlanFrame().
◆ transformToGlobalPlanFrame()
|
protected |
Transform a pose to the global reference frame.
- Parameters
-
pose Current pose
- Returns
- output poose in global reference frame
Definition at line 104 of file path_handler.cpp.
References transformPose().
Referenced by transformPath().


The documentation for this class was generated from the following files:
- nav2_mppi_controller/include/nav2_mppi_controller/tools/path_handler.hpp
- nav2_mppi_controller/src/path_handler.cpp