Critic objective function for aligning to the path. Note: High settings of this will follow the path more precisely, but also makes it difficult (or impossible) to deviate in the presence of dynamic obstacles. This is an important critic to tune and consider in tandem with Obstacle. This is the initial 'Legacy' implementation before replacement Oct 2023. More...
#include <nav2_mppi_controller/include/nav2_mppi_controller/critics/path_align_legacy_critic.hpp>
Public Member Functions | |
| void | initialize () override |
| Initialize critic. | |
| void | score (CriticData &data) override |
| Evaluate cost related to trajectories path alignment. More... | |
 Public Member Functions inherited from mppi::critics::CriticFunction Public Member Functions inherited from mppi::critics::CriticFunction | |
| CriticFunction ()=default | |
| Constructor for mppi::critics::CriticFunction. | |
| virtual | ~CriticFunction ()=default |
| Destructor for mppi::critics::CriticFunction. | |
| void | on_configure (rclcpp_lifecycle::LifecycleNode::WeakPtr parent, const std::string &parent_name, const std::string &name, std::shared_ptr< nav2_costmap_2d::Costmap2DROS > costmap_ros, ParametersHandler *param_handler) |
| Configure critic on bringup. More... | |
| std::string | getName () |
| Get name of critic. | |
Protected Attributes | |
| size_t | offset_from_furthest_ {0} |
| int | trajectory_point_step_ {0} |
| float | threshold_to_consider_ {0} |
| float | max_path_occupancy_ratio_ {0} |
| bool | use_path_orientations_ {false} |
| unsigned int | power_ {0} |
| float | weight_ {0} |
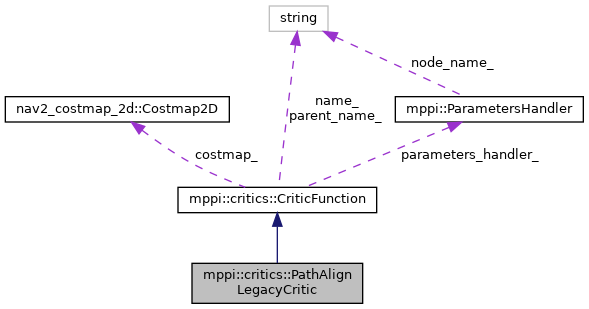
| Protected Attributes inherited from mppi::critics::CriticFunction | |
| bool | enabled_ |
| std::string | name_ |
| std::string | parent_name_ |
| rclcpp_lifecycle::LifecycleNode::WeakPtr | parent_ |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap_ros_ |
| nav2_costmap_2d::Costmap2D * | costmap_ {nullptr} |
| ParametersHandler * | parameters_handler_ |
| rclcpp::Logger | logger_ {rclcpp::get_logger("MPPIController")} |
Detailed Description
Critic objective function for aligning to the path. Note: High settings of this will follow the path more precisely, but also makes it difficult (or impossible) to deviate in the presence of dynamic obstacles. This is an important critic to tune and consider in tandem with Obstacle. This is the initial 'Legacy' implementation before replacement Oct 2023.
Definition at line 33 of file path_align_legacy_critic.hpp.
Member Function Documentation
◆ score()
|
overridevirtual |
Evaluate cost related to trajectories path alignment.
- Parameters
-
costs [out] add reference cost values to this tensor
Implements mppi::critics::CriticFunction.
Definition at line 46 of file path_align_legacy_critic.cpp.
The documentation for this class was generated from the following files:
- nav2_mppi_controller/include/nav2_mppi_controller/critics/path_align_legacy_critic.hpp
- nav2_mppi_controller/src/critics/path_align_legacy_critic.cpp