Critic objective function for avoiding obstacles using costmap's inflated cost. More...
#include <nav2_mppi_controller/include/nav2_mppi_controller/critics/cost_critic.hpp>

Public Member Functions | |
| void | initialize () override |
| Initialize critic. | |
| void | score (CriticData &data) override |
| Evaluate cost related to obstacle avoidance. More... | |
 Public Member Functions inherited from mppi::critics::CriticFunction Public Member Functions inherited from mppi::critics::CriticFunction | |
| CriticFunction ()=default | |
| Constructor for mppi::critics::CriticFunction. | |
| virtual | ~CriticFunction ()=default |
| Destructor for mppi::critics::CriticFunction. | |
| void | on_configure (rclcpp_lifecycle::LifecycleNode::WeakPtr parent, const std::string &parent_name, const std::string &name, std::shared_ptr< nav2_costmap_2d::Costmap2DROS > costmap_ros, ParametersHandler *param_handler) |
| Configure critic on bringup. More... | |
| std::string | getName () |
| Get name of critic. | |
Protected Member Functions | |
| bool | inCollision (float cost, float x, float y, float theta) |
| Checks if cost represents a collision. More... | |
| float | costAtPose (float x, float y) |
| cost at a robot pose More... | |
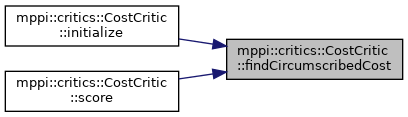
| float | findCircumscribedCost (std::shared_ptr< nav2_costmap_2d::Costmap2DROS > costmap) |
| Find the min cost of the inflation decay function for which the robot MAY be in collision in any orientation. More... | |
Protected Attributes | |
| nav2_costmap_2d::FootprintCollisionChecker< nav2_costmap_2d::Costmap2D * > | collision_checker_ {nullptr} |
| float | possibly_inscribed_cost_ |
| bool | consider_footprint_ {true} |
| float | circumscribed_radius_ {0} |
| float | circumscribed_cost_ {0} |
| float | collision_cost_ {0} |
| float | critical_cost_ {0} |
| float | weight_ {0} |
| float | near_goal_distance_ |
| std::string | inflation_layer_name_ |
| unsigned int | power_ {0} |
| Protected Attributes inherited from mppi::critics::CriticFunction | |
| bool | enabled_ |
| std::string | name_ |
| std::string | parent_name_ |
| rclcpp_lifecycle::LifecycleNode::WeakPtr | parent_ |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap_ros_ |
| nav2_costmap_2d::Costmap2D * | costmap_ {nullptr} |
| ParametersHandler * | parameters_handler_ |
| rclcpp::Logger | logger_ {rclcpp::get_logger("MPPIController")} |
Detailed Description
Critic objective function for avoiding obstacles using costmap's inflated cost.
Definition at line 35 of file cost_critic.hpp.
Member Function Documentation
◆ costAtPose()
|
protected |
cost at a robot pose
- Parameters
-
x X of pose y Y of pose
- Returns
- Collision information at pose
Definition at line 214 of file cost_critic.cpp.
Referenced by score().

◆ findCircumscribedCost()
|
protected |
Find the min cost of the inflation decay function for which the robot MAY be in collision in any orientation.
- Parameters
-
costmap Costmap2DROS to get minimum inscribed cost (e.g. 128 in inflation layer documentation)
- Returns
- double circumscribed cost, any higher than this and need to do full footprint collision checking since some element of the robot could be in collision
Definition at line 76 of file cost_critic.cpp.
Referenced by initialize(), and score().
◆ inCollision()
|
protected |
Checks if cost represents a collision.
- Parameters
-
cost Point cost at pose center x X of pose y Y of pose theta theta of pose
- Returns
- bool if in collision
- Parameters
-
cost Costmap cost
- Returns
- bool if in collision
Definition at line 188 of file cost_critic.cpp.
References nav2_costmap_2d::FootprintCollisionChecker< CostmapT >::footprintCostAtPose().
Referenced by score().


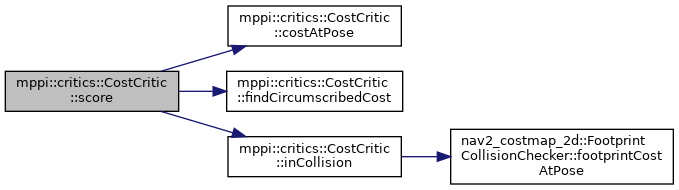
◆ score()
|
overridevirtual |
Evaluate cost related to obstacle avoidance.
- Parameters
-
costs [out] add obstacle cost values to this tensor
Implements mppi::critics::CriticFunction.
Definition at line 121 of file cost_critic.cpp.
References costAtPose(), findCircumscribedCost(), and inCollision().
The documentation for this class was generated from the following files:
- nav2_mppi_controller/include/nav2_mppi_controller/critics/cost_critic.hpp
- nav2_mppi_controller/src/critics/cost_critic.cpp