Critic objective function for enforcing feasible constraints. More...
#include <nav2_mppi_controller/include/nav2_mppi_controller/critics/constraint_critic.hpp>
Public Member Functions | |
| void | initialize () override |
| Initialize critic. | |
| void | score (CriticData &data) override |
| Evaluate cost related to goal following. More... | |
| float | getMaxVelConstraint () |
| float | getMinVelConstraint () |
 Public Member Functions inherited from mppi::critics::CriticFunction Public Member Functions inherited from mppi::critics::CriticFunction | |
| CriticFunction ()=default | |
| Constructor for mppi::critics::CriticFunction. | |
| virtual | ~CriticFunction ()=default |
| Destructor for mppi::critics::CriticFunction. | |
| void | on_configure (rclcpp_lifecycle::LifecycleNode::WeakPtr parent, const std::string &parent_name, const std::string &name, std::shared_ptr< nav2_costmap_2d::Costmap2DROS > costmap_ros, ParametersHandler *param_handler) |
| Configure critic on bringup. More... | |
| std::string | getName () |
| Get name of critic. | |
Protected Attributes | |
| unsigned int | power_ {0} |
| float | weight_ {0} |
| float | min_vel_ |
| float | max_vel_ |
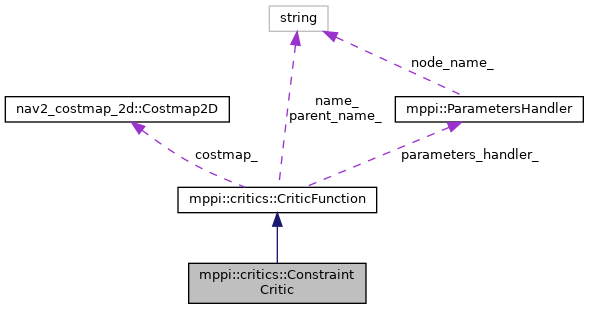
| Protected Attributes inherited from mppi::critics::CriticFunction | |
| bool | enabled_ |
| std::string | name_ |
| std::string | parent_name_ |
| rclcpp_lifecycle::LifecycleNode::WeakPtr | parent_ |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap_ros_ |
| nav2_costmap_2d::Costmap2D * | costmap_ {nullptr} |
| ParametersHandler * | parameters_handler_ |
| rclcpp::Logger | logger_ {rclcpp::get_logger("MPPIController")} |
Detailed Description
Critic objective function for enforcing feasible constraints.
Critic objective function for penalizing wiggling/twirling.
Critic objective function for preferring forward motion.
Critic objective function for following the path approximately To allow for deviation from path in case of dynamic obstacles. Path Align is what aligns the trajectories to the path more or less precisely, if desireable. A higher weight here with an offset > 1 will accelerate the samples to full speed faster and push the follow point further ahead, creating some shortcutting.
Critic objective function for aligning to path in cases of extreme misalignment or turning.
Critic objective function for aligning to the path. Note: High settings of this will follow the path more precisely, but also makes it difficult (or impossible) to deviate in the presence of dynamic obstacles. This is an important critic to tune and consider in tandem with Obstacle.
Critic objective function for avoiding obstacles, allowing it to deviate off the planned path. This is important to tune in tandem with PathAlign to make a balance between path-tracking and dynamic obstacle avoidance capabilities as desirable for a particular application.
Critic objective function for driving towards goal.
Critic objective function for driving towards goal orientation.
Definition at line 29 of file constraint_critic.hpp.
Member Function Documentation
◆ score()
|
overridevirtual |
Evaluate cost related to goal following.
- Parameters
-
costs [out] add reference cost values to this tensor
Implements mppi::critics::CriticFunction.
Definition at line 41 of file constraint_critic.cpp.
The documentation for this class was generated from the following files:
- nav2_mppi_controller/include/nav2_mppi_controller/critics/constraint_critic.hpp
- nav2_mppi_controller/src/critics/constraint_critic.cpp