Uses costmap 2d to assign negative costs if robot footprint is in obstacle on any point of the trajectory. More...
#include <nav2_dwb_controller/dwb_critics/include/dwb_critics/obstacle_footprint.hpp>
Public Member Functions | |
| bool | prepare (const geometry_msgs::msg::Pose2D &pose, const nav_2d_msgs::msg::Twist2D &vel, const geometry_msgs::msg::Pose2D &goal, const nav_2d_msgs::msg::Path2D &global_plan) override |
| Prior to evaluating any trajectories, look at contextual information constant across all trajectories. More... | |
| double | scorePose (const geometry_msgs::msg::Pose2D &pose) override |
| Return the obstacle score for a particular pose. More... | |
| virtual double | scorePose (const geometry_msgs::msg::Pose2D &pose, const Footprint &oriented_footprint) |
| double | getScale () const override |
 Public Member Functions inherited from dwb_critics::BaseObstacleCritic Public Member Functions inherited from dwb_critics::BaseObstacleCritic | |
| void | onInit () override |
| double | scoreTrajectory (const dwb_msgs::msg::Trajectory2D &traj) override |
| Return a raw score for the given trajectory. More... | |
| void | addCriticVisualization (std::vector< std::pair< std::string, std::vector< float >>> &cost_channels) override |
| Add information to the given pointcloud for debugging costmap-grid based scores. More... | |
| virtual bool | isValidCost (const unsigned char cost) |
| Check to see whether a given cell cost is valid for driving through. More... | |
| Public Member Functions inherited from dwb_core::TrajectoryCritic | |
| void | initialize (const nav2_util::LifecycleNode::SharedPtr &nh, const std::string &name, const std::string &ns, std::shared_ptr< nav2_costmap_2d::Costmap2DROS > costmap_ros) |
| Initialize the critic with appropriate pointers and parameters. More... | |
| virtual void | reset () |
| Reset the state of the critic. More... | |
| virtual void | debrief (const nav_2d_msgs::msg::Twist2D &) |
| debrief informs the critic what the chosen cmd_vel was (if it cares) | |
| std::string | getName () |
| void | setScale (const double scale) |
Protected Member Functions | |
| double | lineCost (int x0, int x1, int y0, int y1) |
| Rasterizes a line in the costmap grid and checks for collisions. More... | |
| double | pointCost (int x, int y) |
| Checks the cost of a point in the costmap. More... | |
Protected Attributes | |
| Footprint | footprint_spec_ |
| Protected Attributes inherited from dwb_critics::BaseObstacleCritic | |
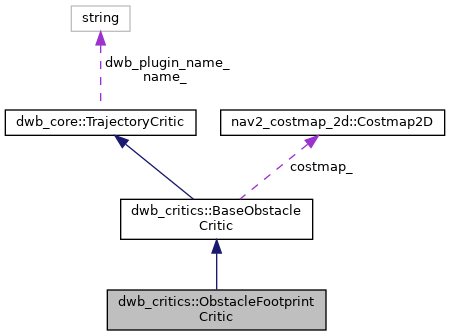
| nav2_costmap_2d::Costmap2D * | costmap_ |
| bool | sum_scores_ |
| Protected Attributes inherited from dwb_core::TrajectoryCritic | |
| std::string | name_ |
| std::string | dwb_plugin_name_ |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap_ros_ |
| double | scale_ |
| rclcpp_lifecycle::LifecycleNode::WeakPtr | node_ |
Additional Inherited Members | |
| Public Types inherited from dwb_core::TrajectoryCritic | |
| using | Ptr = std::shared_ptr< dwb_core::TrajectoryCritic > |
Detailed Description
Uses costmap 2d to assign negative costs if robot footprint is in obstacle on any point of the trajectory.
Internally, this technically only checks if the border of the footprint collides with anything for computational efficiency. This is valid if the obstacles in the local costmap are inflated.
A more robust class could check every cell within the robot's footprint without inflating the obstacles, at some computational cost. That is left as an excercise to the reader.
Definition at line 65 of file obstacle_footprint.hpp.
Member Function Documentation
◆ lineCost()
|
protected |
Rasterizes a line in the costmap grid and checks for collisions.
- Parameters
-
x0 The x position of the first cell in grid coordinates y0 The y position of the first cell in grid coordinates x1 The x position of the second cell in grid coordinates y1 The y position of the second cell in grid coordinates
- Returns
- A positive cost for a legal line... negative otherwise
Definition at line 134 of file obstacle_footprint.cpp.
References pointCost().
Referenced by nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker::footprintCost().


◆ pointCost()
|
protected |
Checks the cost of a point in the costmap.
- Parameters
-
x The x position of the point in cell coordinates y The y position of the point in cell coordinates
- Returns
- A positive cost for a legal point... negative otherwise
Definition at line 150 of file obstacle_footprint.cpp.
References nav2_costmap_2d::Costmap2D::getCost().
Referenced by lineCost(), and nav2_simple_commander.footprint_collision_checker.FootprintCollisionChecker::lineCost().


◆ prepare()
|
overridevirtual |
Prior to evaluating any trajectories, look at contextual information constant across all trajectories.
Subclasses may overwrite. Return false in case there is any error.
- Parameters
-
pose Current pose (costmap frame) vel Current velocity goal The final goal (costmap frame) global_plan Transformed global plan in costmap frame, possibly cropped to nearby points
Reimplemented from dwb_core::TrajectoryCritic.
Definition at line 63 of file obstacle_footprint.cpp.
◆ scorePose()
|
overridevirtual |
Return the obstacle score for a particular pose.
- Parameters
-
pose Pose to check
Reimplemented from dwb_critics::BaseObstacleCritic.
Definition at line 77 of file obstacle_footprint.cpp.
References nav2_costmap_2d::Costmap2D::worldToMap().

The documentation for this class was generated from the following files:
- nav2_dwb_controller/dwb_critics/include/dwb_critics/obstacle_footprint.hpp
- nav2_dwb_controller/dwb_critics/src/obstacle_footprint.cpp