Implementation of the NodeBase part of the Node API. More...
#include <rclcpp/node_interfaces/node_base.hpp>
Public Member Functions | |
| RCLCPP_PUBLIC | NodeBase (const std::string &node_name, const std::string &namespace_, rclcpp::Context::SharedPtr context, const rcl_node_options_t &rcl_node_options, bool use_intra_process_default, bool enable_topic_statistics_default, rclcpp::CallbackGroup::SharedPtr default_callback_group=nullptr) |
| Constructor. More... | |
| RCLCPP_PUBLIC const char * | get_name () const override |
| Return the name of the node. More... | |
| RCLCPP_PUBLIC const char * | get_namespace () const override |
| Return the namespace of the node. More... | |
| RCLCPP_PUBLIC const char * | get_fully_qualified_name () const override |
| Return the fully qualified name of the node. More... | |
| RCLCPP_PUBLIC rclcpp::Context::SharedPtr | get_context () override |
| Return the context of the node. More... | |
| RCLCPP_PUBLIC rcl_node_t * | get_rcl_node_handle () override |
| Return the rcl_node_t node handle (non-const version). | |
| RCLCPP_PUBLIC const rcl_node_t * | get_rcl_node_handle () const override |
| Return the rcl_node_t node handle (const version). | |
| RCLCPP_PUBLIC std::shared_ptr< rcl_node_t > | get_shared_rcl_node_handle () override |
| Return the rcl_node_t node handle in a std::shared_ptr. More... | |
| RCLCPP_PUBLIC std::shared_ptr< const rcl_node_t > | get_shared_rcl_node_handle () const override |
| Return the rcl_node_t node handle in a std::shared_ptr. More... | |
| RCLCPP_PUBLIC rclcpp::CallbackGroup::SharedPtr | create_callback_group (rclcpp::CallbackGroupType group_type, bool automatically_add_to_executor_with_node=true) override |
| Create and return a callback group. | |
| RCLCPP_PUBLIC rclcpp::CallbackGroup::SharedPtr | get_default_callback_group () override |
| Return the default callback group. | |
| RCLCPP_PUBLIC bool | callback_group_in_node (rclcpp::CallbackGroup::SharedPtr group) override |
| Return true if the given callback group is associated with this node. | |
| RCLCPP_PUBLIC void | for_each_callback_group (const CallbackGroupFunction &func) override |
| Iterate over the stored callback groups, calling the given function on each valid one. More... | |
| RCLCPP_PUBLIC std::atomic_bool & | get_associated_with_executor_atomic () override |
| Return the atomic bool which is used to ensure only one executor is used. | |
| RCLCPP_PUBLIC rclcpp::GuardCondition & | get_notify_guard_condition () override |
| Return a guard condition that should be notified when the internal node state changes. More... | |
| RCLCPP_PUBLIC rclcpp::GuardCondition::SharedPtr | get_shared_notify_guard_condition () override |
| Return a guard condition that should be notified when the internal node state changes. More... | |
| RCLCPP_PUBLIC void | trigger_notify_guard_condition () override |
| Trigger the guard condition that notifies of internal node state changes. More... | |
| RCLCPP_PUBLIC bool | get_use_intra_process_default () const override |
| Return the default preference for using intra process communication. | |
| bool | get_enable_topic_statistics_default () const override |
| Return the default preference for enabling topic statistics collection. | |
| std::string | resolve_topic_or_service_name (const std::string &name, bool is_service, bool only_expand=false) const override |
| Expand and remap a given topic or service name. | |
Additional Inherited Members | |
 Public Types inherited from rclcpp::node_interfaces::NodeBaseInterface Public Types inherited from rclcpp::node_interfaces::NodeBaseInterface | |
| using | CallbackGroupFunction = std::function< void(rclcpp::CallbackGroup::SharedPtr)> |
Detailed Description
Implementation of the NodeBase part of the Node API.
Definition at line 37 of file node_base.hpp.
Constructor & Destructor Documentation
◆ NodeBase()
| NodeBase::NodeBase | ( | const std::string & | node_name, |
| const std::string & | namespace_, | ||
| rclcpp::Context::SharedPtr | context, | ||
| const rcl_node_options_t & | rcl_node_options, | ||
| bool | use_intra_process_default, | ||
| bool | enable_topic_statistics_default, | ||
| rclcpp::CallbackGroup::SharedPtr | default_callback_group = nullptr |
||
| ) |
Constructor.
If nullptr (default) is given for the default_callback_group, one will be created by the constructor using the create_callback_group() method, but virtual dispatch will not occur so overrides of that method will not be used.
Definition at line 37 of file node_base.cpp.
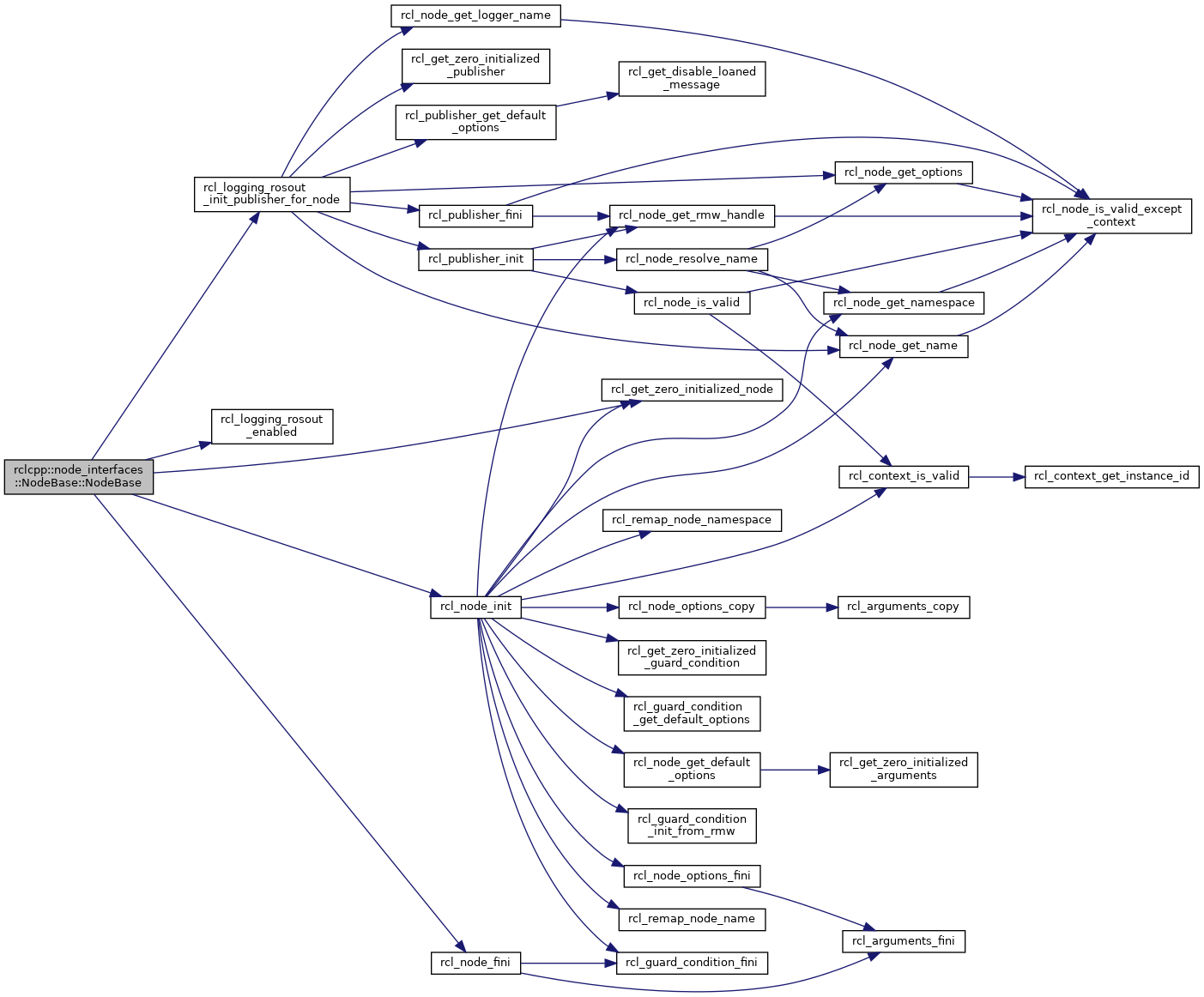
References rcl_node_options_s::enable_rosout, rcl_get_zero_initialized_node(), rcl_logging_rosout_enabled(), rcl_logging_rosout_init_publisher_for_node(), rcl_node_fini(), rcl_node_init(), RCL_RET_ERROR, RCL_RET_INVALID_ARGUMENT, RCL_RET_NODE_INVALID_NAME, RCL_RET_NODE_INVALID_NAMESPACE, and RCL_RET_OK.
Member Function Documentation
◆ for_each_callback_group()
|
overridevirtual |
Iterate over the stored callback groups, calling the given function on each valid one.
This method is called in a thread-safe way, and also makes sure to only call the given function on those items that are still valid.
- Parameters
-
[in] func The callback function to call on each valid callback group.
Implements rclcpp::node_interfaces::NodeBaseInterface.
Definition at line 261 of file node_base.cpp.
◆ get_context()
|
overridevirtual |
Return the context of the node.
- Returns
- SharedPtr to the node's context.
Implements rclcpp::node_interfaces::NodeBaseInterface.
Definition at line 189 of file node_base.cpp.
◆ get_fully_qualified_name()
|
overridevirtual |
Return the fully qualified name of the node.
- Returns
- The fully qualified name of the node.
Implements rclcpp::node_interfaces::NodeBaseInterface.
Definition at line 183 of file node_base.cpp.
References rcl_node_get_fully_qualified_name().

◆ get_name()
|
overridevirtual |
Return the name of the node.
- Returns
- The name of the node.
Implements rclcpp::node_interfaces::NodeBaseInterface.
Definition at line 171 of file node_base.cpp.
References rcl_node_get_name().

◆ get_namespace()
|
overridevirtual |
Return the namespace of the node.
- Returns
- The namespace of the node.
Implements rclcpp::node_interfaces::NodeBaseInterface.
Definition at line 177 of file node_base.cpp.
References rcl_node_get_namespace().

◆ get_notify_guard_condition()
|
overridevirtual |
Return a guard condition that should be notified when the internal node state changes.
For example, this should be notified when a publisher is added or removed.
- Returns
- the GuardCondition if it is valid, else throw runtime error
Implements rclcpp::node_interfaces::NodeBaseInterface.
Definition at line 279 of file node_base.cpp.
◆ get_shared_notify_guard_condition()
|
overridevirtual |
Return a guard condition that should be notified when the internal node state changes.
For example, this should be notified when a publisher is added or removed.
- Returns
- the GuardCondition if it is valid, else nullptr
Implements rclcpp::node_interfaces::NodeBaseInterface.
Definition at line 289 of file node_base.cpp.
◆ get_shared_rcl_node_handle() [1/2]
|
overridevirtual |
Return the rcl_node_t node handle in a std::shared_ptr.
This handle remains valid after the Node is destroyed. The actual rcl node is not finalized until it is out of scope everywhere.
Implements rclcpp::node_interfaces::NodeBaseInterface.
Definition at line 213 of file node_base.cpp.
◆ get_shared_rcl_node_handle() [2/2]
|
overridevirtual |
Return the rcl_node_t node handle in a std::shared_ptr.
This handle remains valid after the Node is destroyed. The actual rcl node is not finalized until it is out of scope everywhere.
Implements rclcpp::node_interfaces::NodeBaseInterface.
Definition at line 207 of file node_base.cpp.
◆ trigger_notify_guard_condition()
|
overridevirtual |
Trigger the guard condition that notifies of internal node state changes.
For example, this should be notified when a publisher is added or removed.
Implements rclcpp::node_interfaces::NodeBaseInterface.
Definition at line 299 of file node_base.cpp.
Referenced by create_callback_group().

The documentation for this class was generated from the following files:
- rclcpp/include/rclcpp/node_interfaces/node_base.hpp
- rclcpp/src/rclcpp/node_interfaces/node_base.cpp