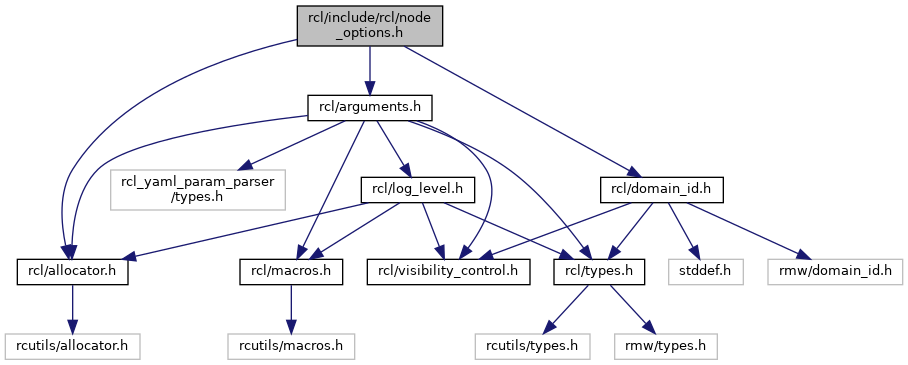

Go to the source code of this file.
Classes | |
| struct | rcl_node_options_s |
| Structure which encapsulates the options for creating a rcl_node_t. More... | |
Macros | |
| #define | RCL_NODE_OPTIONS_DEFAULT_DOMAIN_ID RCL_DEFAULT_DOMAIN_ID |
| Constant which indicates that the default domain id should be used. | |
Typedefs | |
| typedef struct rcl_node_options_s | rcl_node_options_t |
| Structure which encapsulates the options for creating a rcl_node_t. | |
Functions | |
| RCL_PUBLIC rcl_node_options_t | rcl_node_get_default_options (void) |
| Return the default node options in a rcl_node_options_t. More... | |
| RCL_PUBLIC RCL_WARN_UNUSED rcl_ret_t | rcl_node_options_copy (const rcl_node_options_t *options, rcl_node_options_t *options_out) |
| Copy one options structure into another. More... | |
| RCL_PUBLIC RCL_WARN_UNUSED rcl_ret_t | rcl_node_options_fini (rcl_node_options_t *options) |
| Finalize the given node_options. More... | |
Function Documentation
◆ rcl_node_get_default_options()
| RCL_PUBLIC rcl_node_options_t rcl_node_get_default_options | ( | void | ) |
Return the default node options in a rcl_node_options_t.
The default values are:
- allocator = rcl_get_default_allocator()
- use_global_arguments = true
- enable_rosout = true
- arguments = rcl_get_zero_initialized_arguments()
- rosout_qos = rcl_qos_profile_rosout_default
- Returns
- A structure with the default node options.
Definition at line 32 of file node_options.c.
References rcl_node_options_s::allocator, rcl_get_default_allocator, and rcl_get_zero_initialized_arguments().
Referenced by rclcpp::NodeOptions::get_rcl_node_options(), and rcl_node_init().


◆ rcl_node_options_copy()
| RCL_PUBLIC RCL_WARN_UNUSED rcl_ret_t rcl_node_options_copy | ( | const rcl_node_options_t * | options, |
| rcl_node_options_t * | options_out | ||
| ) |
Copy one options structure into another.
| Attribute | Adherence |
|---|---|
| Allocates Memory | Yes |
| Thread-Safe | No |
| Uses Atomics | No |
| Lock-Free | Yes |
- Parameters
-
[in] options The structure to be copied. Its allocator is used to copy memory into the new structure. [out] options_out An options structure containing default values.
- Returns
- RCL_RET_OK if the structure was copied successfully, or
- RCL_RET_INVALID_ARGUMENT if any function arguments are invalid, or
- RCL_RET_BAD_ALLOC if allocating memory failed, or
- RCL_RET_ERROR if an unspecified error occurs.
Definition at line 46 of file node_options.c.
References rcl_node_options_s::allocator, rcl_node_options_s::arguments, rcl_node_options_s::enable_rosout, rcl_arguments_s::impl, rcl_arguments_copy(), RCL_RET_INVALID_ARGUMENT, RCL_RET_OK, rcl_node_options_s::rosout_qos, and rcl_node_options_s::use_global_arguments.
Referenced by rcl_node_init().


◆ rcl_node_options_fini()
| RCL_PUBLIC RCL_WARN_UNUSED rcl_ret_t rcl_node_options_fini | ( | rcl_node_options_t * | options | ) |
Finalize the given node_options.
The given node_options must be non-NULL and valid, i.e. had rcl_node_get_default_options() called on it but not this function yet.
| Attribute | Adherence |
|---|---|
| Allocates Memory | Yes |
| Thread-Safe | No |
| Uses Atomics | Yes |
| Lock-Free | Yes |
- Parameters
-
[in,out] options object to be finalized
- Returns
- RCL_RET_OK if setup is successful, or
- RCL_RET_INVALID_ARGUMENT if any arguments are invalid, or
- RCL_RET_ERROR if an unspecified error occurs.
Definition at line 73 of file node_options.c.
References rcl_node_options_s::allocator, rcl_node_options_s::arguments, rcl_arguments_s::impl, rcl_arguments_fini(), RCL_CHECK_ALLOCATOR, RCL_RET_INVALID_ARGUMENT, and RCL_RET_OK.
Referenced by rcl_node_init().

