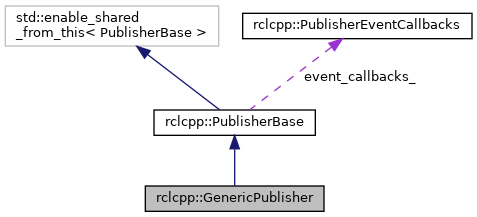
Publisher for serialized messages whose type is not known at compile time. More...
#include <rclcpp/generic_publisher.hpp>
Public Member Functions | |
| template<typename AllocatorT = std::allocator<void>> | |
| GenericPublisher (rclcpp::node_interfaces::NodeBaseInterface *node_base, std::shared_ptr< rcpputils::SharedLibrary > ts_lib, const std::string &topic_name, const std::string &topic_type, const rclcpp::QoS &qos, const rclcpp::PublisherOptionsWithAllocator< AllocatorT > &options) | |
| Constructor. More... | |
| RCLCPP_PUBLIC void | publish (const rclcpp::SerializedMessage &message) |
| Publish a rclcpp::SerializedMessage. | |
| RCLCPP_PUBLIC void | publish_as_loaned_msg (const rclcpp::SerializedMessage &message) |
 Public Member Functions inherited from rclcpp::PublisherBase Public Member Functions inherited from rclcpp::PublisherBase | |
| RCLCPP_PUBLIC | PublisherBase (rclcpp::node_interfaces::NodeBaseInterface *node_base, const std::string &topic, const rosidl_message_type_support_t &type_support, const rcl_publisher_options_t &publisher_options, const PublisherEventCallbacks &event_callbacks, bool use_default_callbacks) |
| Default constructor. More... | |
| RCLCPP_PUBLIC void | bind_event_callbacks (const PublisherEventCallbacks &event_callbacks, bool use_default_callbacks) |
| Add event handlers for passed in event_callbacks. | |
| RCLCPP_PUBLIC const char * | get_topic_name () const |
| Get the topic that this publisher publishes on. More... | |
| RCLCPP_PUBLIC size_t | get_queue_size () const |
| Get the queue size for this publisher. More... | |
| RCLCPP_PUBLIC const rmw_gid_t & | get_gid () const |
| Get the global identifier for this publisher (used in rmw and by DDS). More... | |
| RCLCPP_PUBLIC std::shared_ptr< rcl_publisher_t > | get_publisher_handle () |
| Get the rcl publisher handle. More... | |
| RCLCPP_PUBLIC std::shared_ptr< const rcl_publisher_t > | get_publisher_handle () const |
| Get the rcl publisher handle. More... | |
| RCLCPP_PUBLIC const std::unordered_map< rcl_publisher_event_type_t, std::shared_ptr< rclcpp::EventHandlerBase > > & | get_event_handlers () const |
| Get all the QoS event handlers associated with this publisher. More... | |
| RCLCPP_PUBLIC size_t | get_subscription_count () const |
| Get subscription count. More... | |
| RCLCPP_PUBLIC size_t | get_intra_process_subscription_count () const |
| Get intraprocess subscription count. More... | |
| RCLCPP_PUBLIC bool | is_durability_transient_local () const |
| Get if durability is transient local. More... | |
| RCLCPP_PUBLIC RCUTILS_WARN_UNUSED bool | assert_liveliness () const |
| Manually assert that this Publisher is alive (for RMW_QOS_POLICY_LIVELINESS_MANUAL_BY_TOPIC). More... | |
| RCLCPP_PUBLIC rclcpp::QoS | get_actual_qos () const |
| Get the actual QoS settings, after the defaults have been determined. More... | |
| RCLCPP_PUBLIC bool | can_loan_messages () const |
| Check if publisher instance can loan messages. More... | |
| RCLCPP_PUBLIC bool | operator== (const rmw_gid_t &gid) const |
| Compare this publisher to a gid. More... | |
| RCLCPP_PUBLIC bool | operator== (const rmw_gid_t *gid) const |
| Compare this publisher to a pointer gid. More... | |
| RCLCPP_PUBLIC void | setup_intra_process (uint64_t intra_process_publisher_id, IntraProcessManagerSharedPtr ipm) |
| Implementation utility function used to setup intra process publishing after creation. | |
| RCLCPP_PUBLIC std::vector< rclcpp::NetworkFlowEndpoint > | get_network_flow_endpoints () const |
| Get network flow endpoints. More... | |
| RCLCPP_PUBLIC size_t | lowest_available_ipm_capacity () const |
| Return the lowest available capacity for all subscription buffers. More... | |
| template<typename DurationRepT = int64_t, typename DurationT = std::milli> | |
| bool | wait_for_all_acked (std::chrono::duration< DurationRepT, DurationT > timeout=std::chrono::duration< DurationRepT, DurationT >(-1)) const |
| Wait until all published messages are acknowledged or until the specified timeout elapses. More... | |
| void | set_on_new_qos_event_callback (std::function< void(size_t)> callback, rcl_publisher_event_type_t event_type) |
| Set a callback to be called when each new qos event instance occurs. More... | |
| void | clear_on_new_qos_event_callback (rcl_publisher_event_type_t event_type) |
| Unset the callback registered for new qos events, if any. | |
Additional Inherited Members | |
| Public Types inherited from rclcpp::PublisherBase | |
| using | IntraProcessManagerSharedPtr = std::shared_ptr< rclcpp::experimental::IntraProcessManager > |
| Protected Types inherited from rclcpp::PublisherBase | |
| using | IntraProcessManagerWeakPtr = std::weak_ptr< rclcpp::experimental::IntraProcessManager > |
| Protected Member Functions inherited from rclcpp::PublisherBase | |
| template<typename EventCallbackT > | |
| void | add_event_handler (const EventCallbackT &callback, const rcl_publisher_event_type_t event_type) |
| RCLCPP_PUBLIC void | default_incompatible_qos_callback (QOSOfferedIncompatibleQoSInfo &info) const |
| RCLCPP_PUBLIC void | default_incompatible_type_callback (IncompatibleTypeInfo &info) const |
| Protected Attributes inherited from rclcpp::PublisherBase | |
| std::shared_ptr< rcl_node_t > | rcl_node_handle_ |
| std::shared_ptr< rcl_publisher_t > | publisher_handle_ |
| std::unordered_map< rcl_publisher_event_type_t, std::shared_ptr< rclcpp::EventHandlerBase > > | event_handlers_ |
| bool | intra_process_is_enabled_ |
| IntraProcessManagerWeakPtr | weak_ipm_ |
| uint64_t | intra_process_publisher_id_ |
| rmw_gid_t | rmw_gid_ |
| const rosidl_message_type_support_t | type_support_ |
| const PublisherEventCallbacks | event_callbacks_ |
Detailed Description
Publisher for serialized messages whose type is not known at compile time.
Since the type is not known at compile time, this is not a template, and the dynamic library containing type support information has to be identified and loaded based on the type name.
It does not support intra-process handling.
Definition at line 46 of file generic_publisher.hpp.
Constructor & Destructor Documentation
◆ GenericPublisher()
|
inline |
Constructor.
In order to properly publish to a topic, this publisher needs to be added to the node_topic_interface of the node passed into this constructor.
- See also
- rclcpp::Node::create_generic_publisher() or rclcpp::create_generic_publisher() for creating an instance of this class and adding it to the node_topic_interface.
- Parameters
-
node_base Pointer to parent node's NodeBaseInterface ts_lib Type support library, needs to correspond to topic_type topic_name Topic name topic_type Topic type qos QoS settings options Publisher options. Not all publisher options are currently respected, the only relevant options for this publisher are event_callbacks,use_default_callbacks, andcallback_group.
Definition at line 70 of file generic_publisher.hpp.
Member Function Documentation
◆ publish_as_loaned_msg()
| void rclcpp::GenericPublisher::publish_as_loaned_msg | ( | const rclcpp::SerializedMessage & | message | ) |
Publish a rclcpp::SerializedMessage via loaned message after de-serialization.
- Parameters
-
message a serialized message
- Exceptions
-
anything rclcpp::exceptions::throw_from_rcl_error can show
Definition at line 38 of file generic_publisher.cpp.
References rclcpp::SerializedMessage::get_rcl_serialized_message().

The documentation for this class was generated from the following files:
- rclcpp/include/rclcpp/generic_publisher.hpp
- rclcpp/src/rclcpp/generic_publisher.cpp