Public Types | |
| using | IntraProcessManagerSharedPtr = std::shared_ptr< rclcpp::experimental::IntraProcessManager > |
Public Member Functions | |
| RCLCPP_PUBLIC | PublisherBase (rclcpp::node_interfaces::NodeBaseInterface *node_base, const std::string &topic, const rosidl_message_type_support_t &type_support, const rcl_publisher_options_t &publisher_options, const PublisherEventCallbacks &event_callbacks, bool use_default_callbacks) |
| Default constructor. More... | |
| RCLCPP_PUBLIC void | bind_event_callbacks (const PublisherEventCallbacks &event_callbacks, bool use_default_callbacks) |
| Add event handlers for passed in event_callbacks. | |
| RCLCPP_PUBLIC const char * | get_topic_name () const |
| Get the topic that this publisher publishes on. More... | |
| RCLCPP_PUBLIC size_t | get_queue_size () const |
| Get the queue size for this publisher. More... | |
| RCLCPP_PUBLIC const rmw_gid_t & | get_gid () const |
| Get the global identifier for this publisher (used in rmw and by DDS). More... | |
| RCLCPP_PUBLIC std::shared_ptr< rcl_publisher_t > | get_publisher_handle () |
| Get the rcl publisher handle. More... | |
| RCLCPP_PUBLIC std::shared_ptr< const rcl_publisher_t > | get_publisher_handle () const |
| Get the rcl publisher handle. More... | |
| RCLCPP_PUBLIC const std::unordered_map< rcl_publisher_event_type_t, std::shared_ptr< rclcpp::EventHandlerBase > > & | get_event_handlers () const |
| Get all the QoS event handlers associated with this publisher. More... | |
| RCLCPP_PUBLIC size_t | get_subscription_count () const |
| Get subscription count. More... | |
| RCLCPP_PUBLIC size_t | get_intra_process_subscription_count () const |
| Get intraprocess subscription count. More... | |
| RCLCPP_PUBLIC bool | is_durability_transient_local () const |
| Get if durability is transient local. More... | |
| RCLCPP_PUBLIC RCUTILS_WARN_UNUSED bool | assert_liveliness () const |
| Manually assert that this Publisher is alive (for RMW_QOS_POLICY_LIVELINESS_MANUAL_BY_TOPIC). More... | |
| RCLCPP_PUBLIC rclcpp::QoS | get_actual_qos () const |
| Get the actual QoS settings, after the defaults have been determined. More... | |
| RCLCPP_PUBLIC bool | can_loan_messages () const |
| Check if publisher instance can loan messages. More... | |
| RCLCPP_PUBLIC bool | operator== (const rmw_gid_t &gid) const |
| Compare this publisher to a gid. More... | |
| RCLCPP_PUBLIC bool | operator== (const rmw_gid_t *gid) const |
| Compare this publisher to a pointer gid. More... | |
| RCLCPP_PUBLIC void | setup_intra_process (uint64_t intra_process_publisher_id, IntraProcessManagerSharedPtr ipm) |
| Implementation utility function used to setup intra process publishing after creation. | |
| RCLCPP_PUBLIC std::vector< rclcpp::NetworkFlowEndpoint > | get_network_flow_endpoints () const |
| Get network flow endpoints. More... | |
| RCLCPP_PUBLIC size_t | lowest_available_ipm_capacity () const |
| Return the lowest available capacity for all subscription buffers. More... | |
| template<typename DurationRepT = int64_t, typename DurationT = std::milli> | |
| bool | wait_for_all_acked (std::chrono::duration< DurationRepT, DurationT > timeout=std::chrono::duration< DurationRepT, DurationT >(-1)) const |
| Wait until all published messages are acknowledged or until the specified timeout elapses. More... | |
| void | set_on_new_qos_event_callback (std::function< void(size_t)> callback, rcl_publisher_event_type_t event_type) |
| Set a callback to be called when each new qos event instance occurs. More... | |
| void | clear_on_new_qos_event_callback (rcl_publisher_event_type_t event_type) |
| Unset the callback registered for new qos events, if any. | |
Protected Types | |
| using | IntraProcessManagerWeakPtr = std::weak_ptr< rclcpp::experimental::IntraProcessManager > |
Protected Member Functions | |
| template<typename EventCallbackT > | |
| void | add_event_handler (const EventCallbackT &callback, const rcl_publisher_event_type_t event_type) |
| RCLCPP_PUBLIC void | default_incompatible_qos_callback (QOSOfferedIncompatibleQoSInfo &info) const |
| RCLCPP_PUBLIC void | default_incompatible_type_callback (IncompatibleTypeInfo &info) const |
Protected Attributes | |
| std::shared_ptr< rcl_node_t > | rcl_node_handle_ |
| std::shared_ptr< rcl_publisher_t > | publisher_handle_ |
| std::unordered_map< rcl_publisher_event_type_t, std::shared_ptr< rclcpp::EventHandlerBase > > | event_handlers_ |
| bool | intra_process_is_enabled_ |
| IntraProcessManagerWeakPtr | weak_ipm_ |
| uint64_t | intra_process_publisher_id_ |
| rmw_gid_t | rmw_gid_ |
| const rosidl_message_type_support_t | type_support_ |
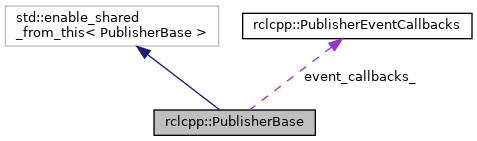
| const PublisherEventCallbacks | event_callbacks_ |
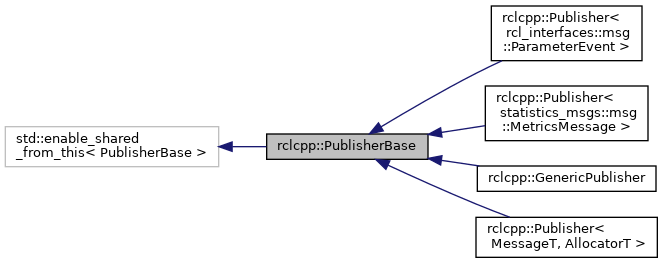
Detailed Description
Definition at line 60 of file publisher_base.hpp.
Constructor & Destructor Documentation
◆ PublisherBase()
| PublisherBase::PublisherBase | ( | rclcpp::node_interfaces::NodeBaseInterface * | node_base, |
| const std::string & | topic, | ||
| const rosidl_message_type_support_t & | type_support, | ||
| const rcl_publisher_options_t & | publisher_options, | ||
| const PublisherEventCallbacks & | event_callbacks, | ||
| bool | use_default_callbacks | ||
| ) |
Default constructor.
Typically, a publisher is not created through this method, but instead is created through a call to Node::create_publisher.
- Parameters
-
[in] node_base A pointer to the NodeBaseInterface for the parent node. [in] topic The topic that this publisher publishes on. [in] type_support The type support structure for the type to be published. [in] publisher_options QoS settings for this publisher.
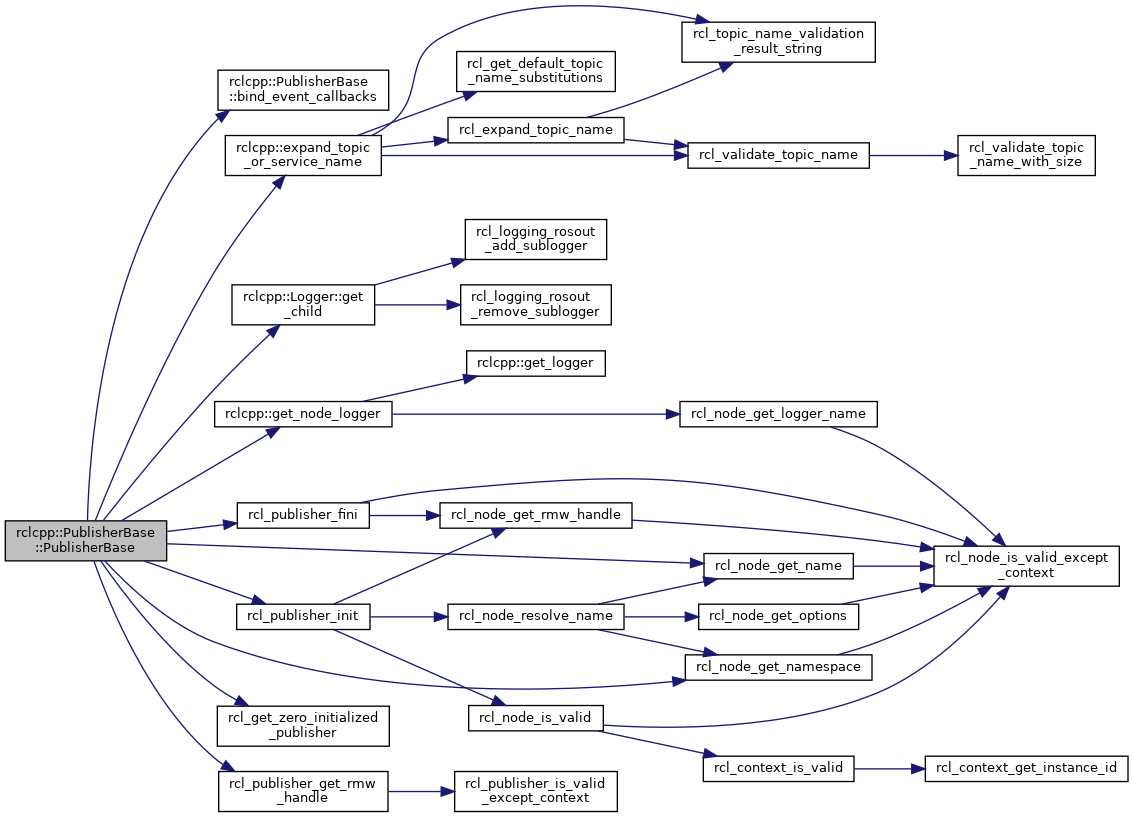
Definition at line 44 of file publisher_base.cpp.
References bind_event_callbacks(), rclcpp::expand_topic_or_service_name(), rclcpp::Logger::get_child(), rclcpp::get_node_logger(), rcl_get_zero_initialized_publisher(), rcl_node_get_name(), rcl_node_get_namespace(), rcl_publisher_fini(), rcl_publisher_get_rmw_handle(), rcl_publisher_init(), RCL_RET_OK, and RCL_RET_TOPIC_NAME_INVALID.
Member Function Documentation
◆ assert_liveliness()
| bool PublisherBase::assert_liveliness | ( | ) | const |
Manually assert that this Publisher is alive (for RMW_QOS_POLICY_LIVELINESS_MANUAL_BY_TOPIC).
If the rmw Liveliness policy is set to RMW_QOS_POLICY_LIVELINESS_MANUAL_BY_TOPIC, the creator of this publisher may manually call assert_liveliness at some point in time to signal to the rest of the system that this Node is still alive.
- Returns
trueif the liveliness was asserted successfully, otherwisefalse
Definition at line 314 of file publisher_base.cpp.
References rcl_publisher_assert_liveliness(), and RCL_RET_OK.

◆ can_loan_messages()
| bool PublisherBase::can_loan_messages | ( | ) | const |
Check if publisher instance can loan messages.
Depending on the middleware and the message type, this will return true if the middleware can allocate a ROS message instance.
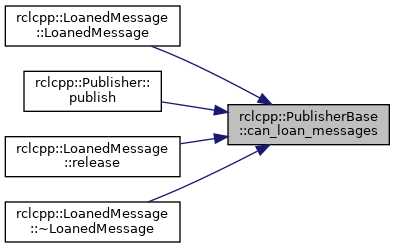
Definition at line 320 of file publisher_base.cpp.
References rcl_publisher_can_loan_messages().
Referenced by rclcpp::LoanedMessage< MessageT, AllocatorT >::LoanedMessage(), rclcpp::Publisher< MessageT, AllocatorT >::publish(), rclcpp::LoanedMessage< MessageT, AllocatorT >::release(), and rclcpp::LoanedMessage< MessageT, AllocatorT >::~LoanedMessage().

◆ get_actual_qos()
| rclcpp::QoS PublisherBase::get_actual_qos | ( | ) | const |
Get the actual QoS settings, after the defaults have been determined.
The actual configuration applied when using RMW_QOS_POLICY_*_SYSTEM_DEFAULT can only be resolved after the creation of the publisher, and it depends on the underlying rmw implementation. If the underlying setting in use can't be represented in ROS terms, it will be set to RMW_QOS_POLICY_*_UNKNOWN. May throw runtime_error when an unexpected error occurs.
- Returns
- The actual qos settings.
Definition at line 301 of file publisher_base.cpp.
References rclcpp::QoSInitialization::from_rmw(), and rcl_publisher_get_actual_qos().
Referenced by rclcpp::Publisher< MessageT, AllocatorT >::post_init_setup().


◆ get_event_handlers()
| const std::unordered_map< rcl_publisher_event_type_t, std::shared_ptr< rclcpp::EventHandlerBase > > & PublisherBase::get_event_handlers | ( | ) | const |
Get all the QoS event handlers associated with this publisher.
- Returns
- The map of QoS event handlers.
Definition at line 246 of file publisher_base.cpp.
◆ get_gid()
| const rmw_gid_t & PublisherBase::get_gid | ( | ) | const |
Get the global identifier for this publisher (used in rmw and by DDS).
- Returns
- The gid.
Definition at line 227 of file publisher_base.cpp.
Referenced by operator==().

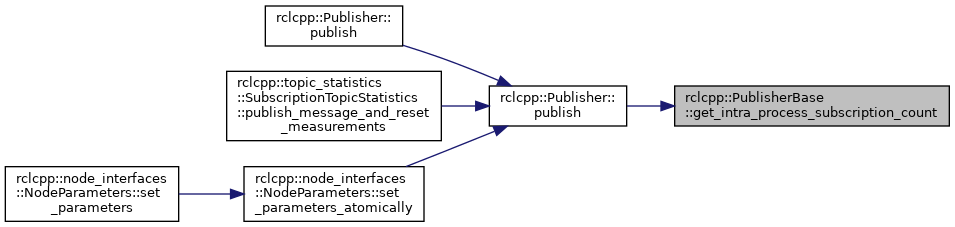
◆ get_intra_process_subscription_count()
| size_t PublisherBase::get_intra_process_subscription_count | ( | ) | const |
Get intraprocess subscription count.
- Returns
- The number of intraprocess subscriptions.
Definition at line 277 of file publisher_base.cpp.
Referenced by rclcpp::Publisher< MessageT, AllocatorT >::publish().
◆ get_network_flow_endpoints()
| std::vector< rclcpp::NetworkFlowEndpoint > PublisherBase::get_network_flow_endpoints | ( | ) | const |
Get network flow endpoints.
Describes network flow endpoints that this publisher is sending messages out on
- Returns
- vector of NetworkFlowEndpoint
Definition at line 377 of file publisher_base.cpp.
References RCL_RET_OK.
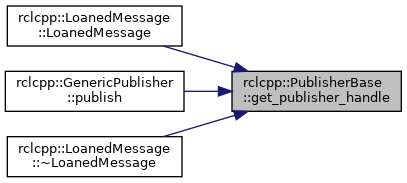
◆ get_publisher_handle() [1/2]
| std::shared_ptr< rcl_publisher_t > PublisherBase::get_publisher_handle | ( | ) |
Get the rcl publisher handle.
- Returns
- The rcl publisher handle.
Definition at line 233 of file publisher_base.cpp.
Referenced by rclcpp::LoanedMessage< MessageT, AllocatorT >::LoanedMessage(), rclcpp::GenericPublisher::publish(), and rclcpp::LoanedMessage< MessageT, AllocatorT >::~LoanedMessage().
◆ get_publisher_handle() [2/2]
| std::shared_ptr< const rcl_publisher_t > PublisherBase::get_publisher_handle | ( | ) | const |
Get the rcl publisher handle.
- Returns
- The rcl publisher handle.
Definition at line 239 of file publisher_base.cpp.
◆ get_queue_size()
| size_t PublisherBase::get_queue_size | ( | ) | const |
Get the queue size for this publisher.
- Returns
- The queue size.
Definition at line 214 of file publisher_base.cpp.
References rcl_publisher_options_s::qos, and rcl_publisher_get_options().

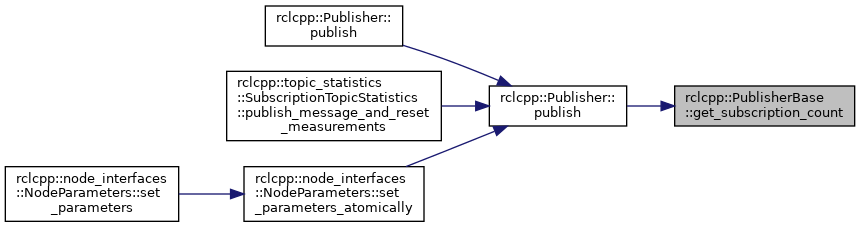
◆ get_subscription_count()
| size_t PublisherBase::get_subscription_count | ( | ) | const |
Get subscription count.
- Returns
- The number of subscriptions.
Definition at line 252 of file publisher_base.cpp.
References rcl_context_is_valid(), rcl_publisher_get_context(), rcl_publisher_get_subscription_count(), rcl_publisher_is_valid_except_context(), RCL_RET_OK, and RCL_RET_PUBLISHER_INVALID.
Referenced by rclcpp::Publisher< MessageT, AllocatorT >::publish().

◆ get_topic_name()
| const char * PublisherBase::get_topic_name | ( | ) | const |
Get the topic that this publisher publishes on.
- Returns
- The topic name.
Definition at line 129 of file publisher_base.cpp.
References rcl_publisher_get_topic_name().

◆ is_durability_transient_local()
| bool PublisherBase::is_durability_transient_local | ( | ) | const |
Get if durability is transient local.
- Returns
- If durability is transient local
Definition at line 294 of file publisher_base.cpp.
References rcl_publisher_get_actual_qos().

◆ lowest_available_ipm_capacity()
| size_t PublisherBase::lowest_available_ipm_capacity | ( | ) | const |
Return the lowest available capacity for all subscription buffers.
For intraprocess communication return the lowest buffer capacity for all subscriptions. If intraprocess is disabled or no intraprocess subscriptions present, return maximum of size_t. On failure return 0.
- Returns
- lowest buffer capacity for all subscriptions
Definition at line 413 of file publisher_base.cpp.
References rclcpp::get_logger().

◆ operator==() [1/2]
| bool PublisherBase::operator== | ( | const rmw_gid_t & | gid | ) | const |
Compare this publisher to a gid.
Note that this function calls the next function.
- Parameters
-
[in] gid Reference to a gid.
- Returns
- True if the publisher's gid matches the input.
Definition at line 326 of file publisher_base.cpp.
◆ operator==() [2/2]
| bool PublisherBase::operator== | ( | const rmw_gid_t * | gid | ) | const |
Compare this publisher to a pointer gid.
A wrapper for comparing this publisher's gid to the input using rmw_compare_gids_equal.
- Parameters
-
[in] gid A pointer to a gid.
- Returns
- True if this publisher's gid matches the input.
Definition at line 332 of file publisher_base.cpp.
References get_gid().

◆ set_on_new_qos_event_callback()
|
inline |
Set a callback to be called when each new qos event instance occurs.
The callback receives a size_t which is the number of events that occurred since the last time this callback was called. Normally this is 1, but can be > 1 if events occurred before any callback was set.
Since this callback is called from the middleware, you should aim to make it fast and not blocking. If you need to do a lot of work or wait for some other event, you should spin it off to another thread, otherwise you risk blocking the middleware.
Calling it again will clear any previously set callback.
An exception will be thrown if the callback is not callable.
This function is thread-safe.
If you want more information available in the callback, like the qos event or other information, you may use a lambda with captures or std::bind.
- Parameters
-
[in] callback functor to be called when a new event occurs [in] event_type identifier for the qos event we want to attach the callback to
Definition at line 302 of file publisher_base.hpp.
References rclcpp::get_logger().

◆ wait_for_all_acked()
|
inline |
Wait until all published messages are acknowledged or until the specified timeout elapses.
This method waits until all published messages are acknowledged by all matching subscriptions or the given timeout elapses.
If the timeout is negative then this method will block indefinitely until all published messages are acknowledged. If the timeout is zero then this method will not block, it will check if all published messages are acknowledged and return immediately. If the timeout is greater than zero, this method will wait until all published messages are acknowledged or the timeout elapses.
This method only waits for acknowledgments if the publisher's QoS profile is RELIABLE. Otherwise this method will immediately return true.
- Parameters
-
[in] timeout the duration to wait for all published messages to be acknowledged.
- Returns
trueif all published messages were acknowledged before the given timeout elapsed, otherwisefalse.
- Exceptions
-
rclcpp::exceptions::RCLError if middleware doesn't support or internal error occurs std::invalid_argument if timeout is greater than std::chrono::nanoseconds::max() or less than std::chrono::nanoseconds::min()
Definition at line 259 of file publisher_base.hpp.
References rcl_publisher_wait_for_all_acked(), RCL_RET_OK, and RCL_RET_TIMEOUT.

The documentation for this class was generated from the following files:
- rclcpp/include/rclcpp/publisher_base.hpp
- rclcpp/src/rclcpp/publisher_base.cpp