Public Member Functions | |
| RCLCPP_PUBLIC | TimerBase (Clock::SharedPtr clock, std::chrono::nanoseconds period, rclcpp::Context::SharedPtr context) |
| TimerBase constructor. More... | |
| virtual RCLCPP_PUBLIC | ~TimerBase () |
| TimerBase destructor. | |
| RCLCPP_PUBLIC void | cancel () |
| Cancel the timer. More... | |
| RCLCPP_PUBLIC bool | is_canceled () |
| Return the timer cancellation state. More... | |
| RCLCPP_PUBLIC void | reset () |
| Reset the timer. More... | |
| virtual RCLCPP_PUBLIC bool | call ()=0 |
| Indicate that we're about to execute the callback. More... | |
| virtual RCLCPP_PUBLIC void | execute_callback ()=0 |
| Call the callback function when the timer signal is emitted. | |
| RCLCPP_PUBLIC std::shared_ptr< const rcl_timer_t > | get_timer_handle () |
| RCLCPP_PUBLIC std::chrono::nanoseconds | time_until_trigger () |
| Check how long the timer has until its next scheduled callback. More... | |
| virtual bool | is_steady ()=0 |
| Is the clock steady (i.e. is the time between ticks constant?) More... | |
| RCLCPP_PUBLIC bool | is_ready () |
| Check if the timer is ready to trigger the callback. More... | |
| RCLCPP_PUBLIC bool | exchange_in_use_by_wait_set_state (bool in_use_state) |
| Exchange the "in use by wait set" state for this timer. More... | |
Protected Attributes | |
| Clock::SharedPtr | clock_ |
| std::shared_ptr< rcl_timer_t > | timer_handle_ |
| std::atomic< bool > | in_use_by_wait_set_ {false} |
Detailed Description
Constructor & Destructor Documentation
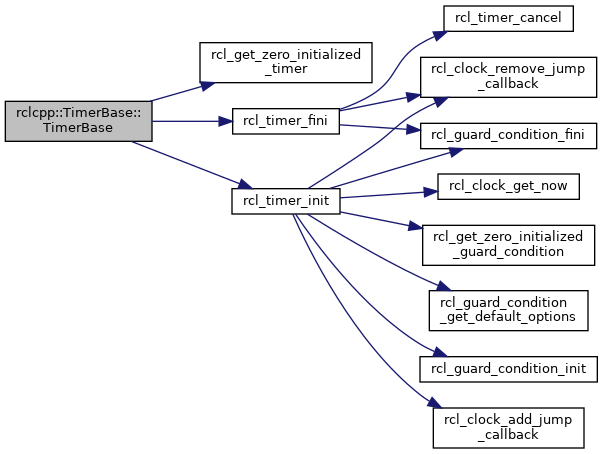
◆ TimerBase()
|
explicit |
TimerBase constructor.
- Parameters
-
clock A clock to use for time and sleeping period The interval at which the timer fires context node context
Definition at line 29 of file timer.cpp.
References rcl_get_default_allocator, rcl_get_zero_initialized_timer(), RCL_RET_OK, rcl_timer_fini(), and rcl_timer_init().
Member Function Documentation
◆ call()
|
pure virtual |
Indicate that we're about to execute the callback.
The multithreaded executor takes advantage of this to avoid scheduling the callback multiple times.
- Returns
trueif the callback should be executed,falseif the timer was canceled.
Implemented in rclcpp::GenericTimer< FunctorT, >.
◆ cancel()
| void TimerBase::cancel | ( | ) |
Cancel the timer.
- Exceptions
-
std::runtime_error if the rcl_timer_cancel returns a failure
Definition at line 77 of file timer.cpp.
References RCL_RET_OK, and rcl_timer_cancel().
Referenced by rclcpp::GenericTimer< FunctorT, >::~GenericTimer().


◆ exchange_in_use_by_wait_set_state()
| bool TimerBase::exchange_in_use_by_wait_set_state | ( | bool | in_use_state | ) |
Exchange the "in use by wait set" state for this timer.
This is used to ensure this timer is not used by multiple wait sets at the same time.
- Parameters
-
[in] in_use_state the new state to exchange into the state, true indicates it is now in use by a wait set, and false is that it is no longer in use by a wait set.
- Returns
- the previous state.
◆ is_canceled()
| bool TimerBase::is_canceled | ( | ) |
Return the timer cancellation state.
- Returns
- true if the timer has been cancelled, false otherwise
- Exceptions
-
std::runtime_error if the rcl_get_error_state returns 0 rclcpp::exceptions::RCLError some child class exception based on ret
Definition at line 86 of file timer.cpp.
References RCL_RET_OK, and rcl_timer_is_canceled().

◆ is_ready()
| bool TimerBase::is_ready | ( | ) |
Check if the timer is ready to trigger the callback.
This function expects its caller to immediately trigger the callback after this function, since it maintains the last time the callback was triggered.
- Returns
- True if the timer needs to trigger.
- Exceptions
-
std::runtime_error if it failed to check timer
Definition at line 106 of file timer.cpp.
References RCL_RET_OK, and rcl_timer_is_ready().

◆ is_steady()
|
pure virtual |
Is the clock steady (i.e. is the time between ticks constant?)
- Returns
- True if the clock used by this timer is steady.
Implemented in rclcpp::GenericTimer< FunctorT, >.
◆ reset()
| void TimerBase::reset | ( | ) |
Reset the timer.
- Exceptions
-
std::runtime_error if the rcl_timer_reset returns a failure
Definition at line 97 of file timer.cpp.
References RCL_RET_OK, and rcl_timer_reset().

◆ time_until_trigger()
| std::chrono::nanoseconds TimerBase::time_until_trigger | ( | ) |
Check how long the timer has until its next scheduled callback.
- Returns
- A std::chrono::duration representing the relative time until the next callback or std::chrono::nanoseconds::max() if the timer is canceled.
- Exceptions
-
std::runtime_error if the rcl_timer_get_time_until_next_call returns a failure
Definition at line 117 of file timer.cpp.
References RCL_RET_OK, RCL_RET_TIMER_CANCELED, and rcl_timer_get_time_until_next_call().

The documentation for this class was generated from the following files: