Public Member Functions | |
| Service (std::shared_ptr< rcl_node_t > node_handle, const std::string &service_name, AnyServiceCallback< ServiceT > any_callback, rcl_service_options_t &service_options) | |
| Default constructor. More... | |
| Service (std::shared_ptr< rcl_node_t > node_handle, std::shared_ptr< rcl_service_t > service_handle, AnyServiceCallback< ServiceT > any_callback) | |
| Default constructor. More... | |
| Service (std::shared_ptr< rcl_node_t > node_handle, rcl_service_t *service_handle, AnyServiceCallback< ServiceT > any_callback) | |
| Default constructor. More... | |
| bool | take_request (typename ServiceT::Request &request_out, rmw_request_id_t &request_id_out) |
| Take the next request from the service. More... | |
| std::shared_ptr< void > | create_request () override |
| std::shared_ptr< rmw_request_id_t > | create_request_header () override |
| void | handle_request (std::shared_ptr< rmw_request_id_t > request_header, std::shared_ptr< void > request) override |
| void | send_response (rmw_request_id_t &req_id, typename ServiceT::Response &response) |
 Public Member Functions inherited from rclcpp::ServiceBase Public Member Functions inherited from rclcpp::ServiceBase | |
| RCLCPP_PUBLIC | ServiceBase (std::shared_ptr< rcl_node_t > node_handle) |
| RCLCPP_PUBLIC const char * | get_service_name () |
| Return the name of the service. More... | |
| RCLCPP_PUBLIC std::shared_ptr< rcl_service_t > | get_service_handle () |
| Return the rcl_service_t service handle in a std::shared_ptr. More... | |
| RCLCPP_PUBLIC std::shared_ptr< const rcl_service_t > | get_service_handle () const |
| Return the rcl_service_t service handle in a std::shared_ptr. More... | |
| RCLCPP_PUBLIC bool | take_type_erased_request (void *request_out, rmw_request_id_t &request_id_out) |
| Take the next request from the service as a type erased pointer. More... | |
| RCLCPP_PUBLIC bool | exchange_in_use_by_wait_set_state (bool in_use_state) |
| Exchange the "in use by wait set" state for this service. More... | |
| RCLCPP_PUBLIC rclcpp::QoS | get_response_publisher_actual_qos () const |
| Get the actual response publisher QoS settings, after the defaults have been determined. More... | |
| RCLCPP_PUBLIC rclcpp::QoS | get_request_subscription_actual_qos () const |
| Get the actual request subscription QoS settings, after the defaults have been determined. More... | |
| void | set_on_new_request_callback (std::function< void(size_t)> callback) |
| Set a callback to be called when each new request is received. More... | |
| void | clear_on_new_request_callback () |
| Unset the callback registered for new requests, if any. | |
Additional Inherited Members | |
| Protected Member Functions inherited from rclcpp::ServiceBase | |
| RCLCPP_PUBLIC rcl_node_t * | get_rcl_node_handle () |
| RCLCPP_PUBLIC const rcl_node_t * | get_rcl_node_handle () const |
| RCLCPP_PUBLIC void | set_on_new_request_callback (rcl_event_callback_t callback, const void *user_data) |
| Protected Attributes inherited from rclcpp::ServiceBase | |
| std::shared_ptr< rcl_node_t > | node_handle_ |
| std::shared_ptr< rcl_service_t > | service_handle_ |
| bool | owns_rcl_handle_ = true |
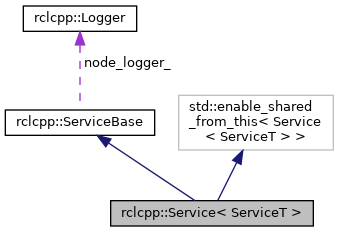
| rclcpp::Logger | node_logger_ |
| std::atomic< bool > | in_use_by_wait_set_ {false} |
| std::recursive_mutex | callback_mutex_ |
| std::function< void(size_t)> | on_new_request_callback_ {nullptr} |
Detailed Description
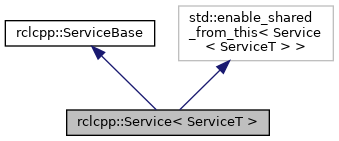
template<typename ServiceT>
class rclcpp::Service< ServiceT >
Definition at line 277 of file service.hpp.
Constructor & Destructor Documentation
◆ Service() [1/3]
|
inline |
Default constructor.
The constructor for a Service is almost never called directly. Instead, services should be instantiated through the function rclcpp::create_service().
- Parameters
-
[in] node_handle NodeBaseInterface pointer that is used in part of the setup. [in] service_name Name of the topic to publish to. [in] any_callback User defined callback to call when a client request is received. [in] service_options options for the subscription.
Definition at line 305 of file service.hpp.
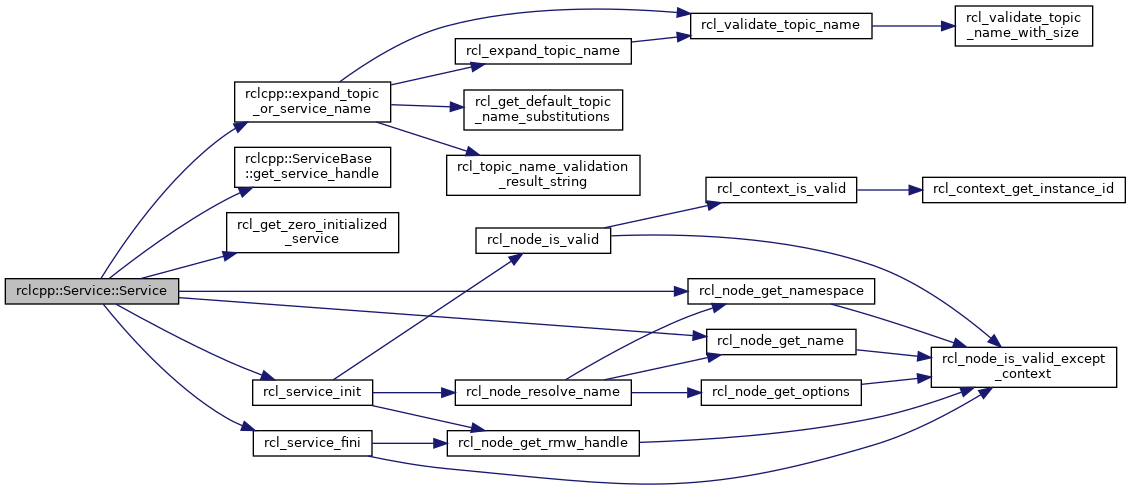
References rclcpp::expand_topic_or_service_name(), rclcpp::ServiceBase::get_service_handle(), rcl_get_zero_initialized_service(), rcl_node_get_name(), rcl_node_get_namespace(), RCL_RET_OK, RCL_RET_SERVICE_NAME_INVALID, rcl_service_fini(), and rcl_service_init().
◆ Service() [2/3]
|
inline |
Default constructor.
The constructor for a Service is almost never called directly. Instead, services should be instantiated through the function rclcpp::create_service().
- Parameters
-
[in] node_handle NodeBaseInterface pointer that is used in part of the setup. [in] service_handle service handle. [in] any_callback User defined callback to call when a client request is received.
Definition at line 369 of file service.hpp.
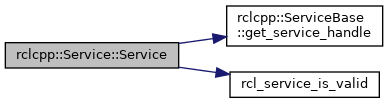
References rclcpp::ServiceBase::get_service_handle(), and rcl_service_is_valid().
◆ Service() [3/3]
|
inline |
Default constructor.
The constructor for a Service is almost never called directly. Instead, services should be instantiated through the function rclcpp::create_service().
- Parameters
-
[in] node_handle NodeBaseInterface pointer that is used in part of the setup. [in] service_handle service handle. [in] any_callback User defined callback to call when a client request is received.
Definition at line 404 of file service.hpp.
References rclcpp::ServiceBase::get_service_handle(), rcl_service_s::impl, and rcl_service_is_valid().
Member Function Documentation
◆ take_request()
|
inline |
Take the next request from the service.
- Parameters
-
[out] request_out The reference to a service request object into which the middleware will copy the taken request. [out] request_id_out The output id for the request which can be used to associate response with this request in the future.
- Returns
- true if the request was taken, otherwise false.
- Exceptions
-
rclcpp::exceptions::RCLError based exceptions if the underlying rcl calls fail.
Definition at line 450 of file service.hpp.
References rclcpp::ServiceBase::take_type_erased_request().

The documentation for this class was generated from the following files:
- rclcpp/include/rclcpp/any_service_callback.hpp
- rclcpp/include/rclcpp/service.hpp