A condition that can be waited on in a single wait set and asynchronously triggered. More...
#include <rclcpp/guard_condition.hpp>

Public Member Functions | |
| RCLCPP_PUBLIC | GuardCondition (rclcpp::Context::SharedPtr context=rclcpp::contexts::get_global_default_context(), rcl_guard_condition_options_t guard_condition_options=rcl_guard_condition_get_default_options()) |
| Construct the guard condition, optionally specifying which Context to use. More... | |
| RCLCPP_PUBLIC rclcpp::Context::SharedPtr | get_context () const |
| Return the context used when creating this guard condition. | |
| RCLCPP_PUBLIC rcl_guard_condition_t & | get_rcl_guard_condition () |
| Return the underlying rcl guard condition structure. | |
| RCLCPP_PUBLIC const rcl_guard_condition_t & | get_rcl_guard_condition () const |
| Return the underlying rcl guard condition structure. | |
| RCLCPP_PUBLIC void | trigger () |
| Notify the wait set waiting on this condition, if any, that the condition had been met. More... | |
| RCLCPP_PUBLIC bool | exchange_in_use_by_wait_set_state (bool in_use_state) |
| Exchange the "in use by wait set" state for this guard condition. More... | |
| RCLCPP_PUBLIC void | add_to_wait_set (rcl_wait_set_t *wait_set) |
| Adds the guard condition to a waitset. More... | |
| RCLCPP_PUBLIC void | set_on_trigger_callback (std::function< void(size_t)> callback) |
Protected Attributes | |
| rclcpp::Context::SharedPtr | context_ |
| rcl_guard_condition_t | rcl_guard_condition_ |
| std::atomic< bool > | in_use_by_wait_set_ {false} |
| std::recursive_mutex | reentrant_mutex_ |
| std::function< void(size_t)> | on_trigger_callback_ {nullptr} |
| size_t | unread_count_ {0} |
| rcl_wait_set_t * | wait_set_ {nullptr} |
Detailed Description
A condition that can be waited on in a single wait set and asynchronously triggered.
Definition at line 31 of file guard_condition.hpp.
Constructor & Destructor Documentation
◆ GuardCondition()
|
explicit |
Construct the guard condition, optionally specifying which Context to use.
- Parameters
-
[in] context Optional custom context to be used. Defaults to using the global default context singleton. Shared ownership of the context is held with the guard condition until destruction. [in] guard_condition_options Optional guard condition options to be used. Defaults to using the default guard condition options.
- Exceptions
-
std::invalid_argument if the context is nullptr. rclcpp::exceptions::RCLError based exceptions when underlying rcl functions fail.
Definition at line 25 of file guard_condition.cpp.
References rcl_guard_condition_init(), and RCL_RET_OK.

Member Function Documentation
◆ add_to_wait_set()
| void rclcpp::GuardCondition::add_to_wait_set | ( | rcl_wait_set_t * | wait_set | ) |
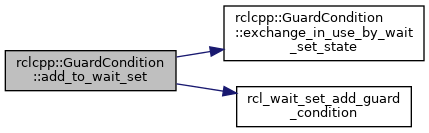
Adds the guard condition to a waitset.
This function is thread-safe.
- Parameters
-
[in] wait_set pointer to a wait set where to add the guard condition
Definition at line 97 of file guard_condition.cpp.
References exchange_in_use_by_wait_set_state(), RCL_RET_OK, and rcl_wait_set_add_guard_condition().
◆ exchange_in_use_by_wait_set_state()
| bool rclcpp::GuardCondition::exchange_in_use_by_wait_set_state | ( | bool | in_use_state | ) |
Exchange the "in use by wait set" state for this guard condition.
This is used to ensure this guard condition is not used by multiple wait sets at the same time.
- Parameters
-
[in] in_use_state the new state to exchange into the state, true indicates it is now in use by a wait set, and false is that it is no longer in use by a wait set.
- Returns
- the previous state.
Definition at line 91 of file guard_condition.cpp.
Referenced by add_to_wait_set().

◆ trigger()
| void rclcpp::GuardCondition::trigger | ( | ) |
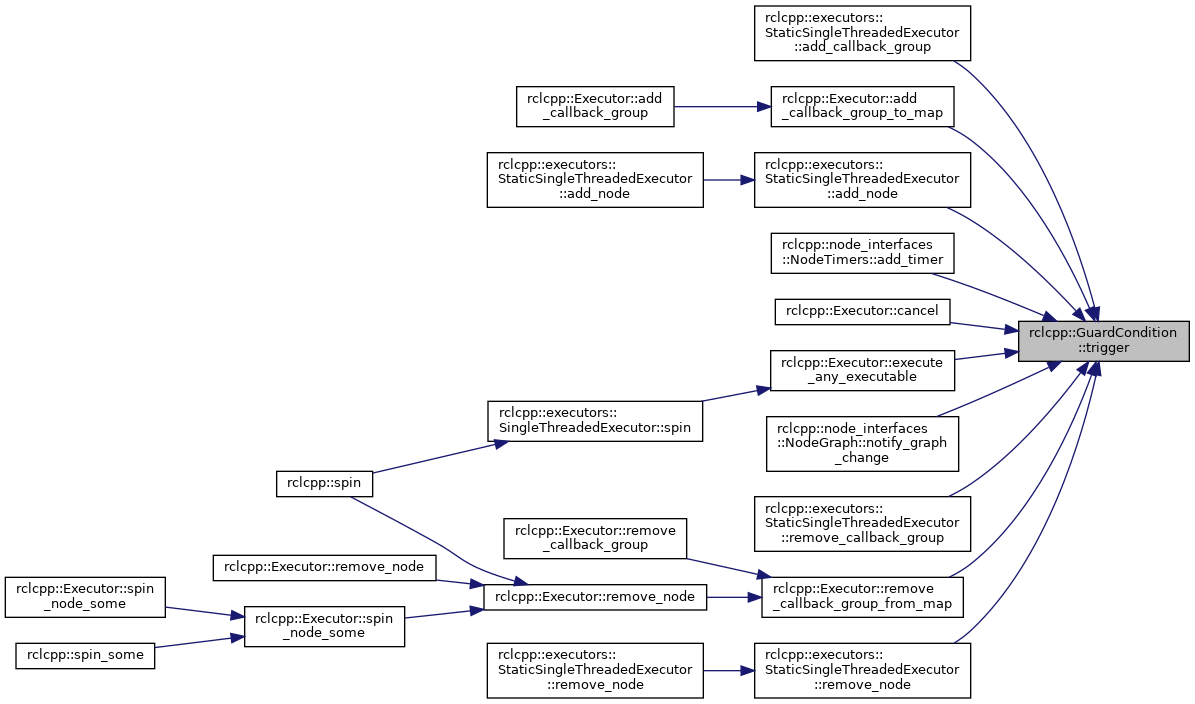
Notify the wait set waiting on this condition, if any, that the condition had been met.
This function is thread-safe, and may be called concurrently with waiting on this guard condition in a wait set.
- Exceptions
-
rclcpp::exceptions::RCLError based exceptions when underlying rcl functions fail.
Definition at line 75 of file guard_condition.cpp.
References RCL_RET_OK, and rcl_trigger_guard_condition().
Referenced by rclcpp::executors::StaticSingleThreadedExecutor::add_callback_group(), rclcpp::Executor::add_callback_group_to_map(), rclcpp::executors::StaticSingleThreadedExecutor::add_node(), rclcpp::node_interfaces::NodeTimers::add_timer(), rclcpp::Executor::cancel(), rclcpp::Executor::execute_any_executable(), rclcpp::node_interfaces::NodeGraph::notify_graph_change(), rclcpp::executors::StaticSingleThreadedExecutor::remove_callback_group(), rclcpp::Executor::remove_callback_group_from_map(), and rclcpp::executors::StaticSingleThreadedExecutor::remove_node().

The documentation for this class was generated from the following files:
- rclcpp/include/rclcpp/guard_condition.hpp
- rclcpp/src/rclcpp/guard_condition.cpp