An iterator implementing Bresenham Ray-Tracing. More...
#include <nav2_util/include/nav2_util/line_iterator.hpp>
Public Member Functions | |
| LineIterator (int x0, int y0, int x1, int y1) | |
| A constructor for LineIterator. More... | |
| bool | isValid () const |
| If the iterator is valid. More... | |
| void | advance () |
| Advance iteration along the line. | |
| int | getX () const |
| Get current X value. More... | |
| int | getY () const |
| Get current Y value. More... | |
| int | getX0 () const |
| Get initial X value. More... | |
| int | getY0 () const |
| Get initial Y value. More... | |
| int | getX1 () const |
| Get terminal X value. More... | |
| int | getY1 () const |
| Get terminal Y value. More... | |
Detailed Description
An iterator implementing Bresenham Ray-Tracing.
Definition at line 46 of file line_iterator.hpp.
Constructor & Destructor Documentation
◆ LineIterator()
|
inline |
A constructor for LineIterator.
- Parameters
-
x0 Starting x y0 Starting y x1 Ending x y1 Ending y
Definition at line 56 of file line_iterator.hpp.
Member Function Documentation
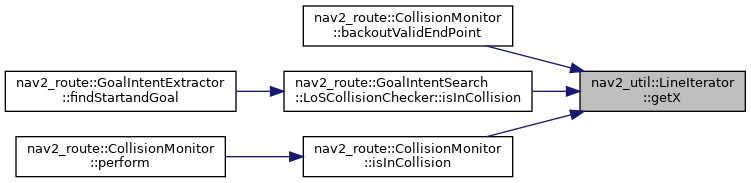
◆ getX()
|
inline |
Get current X value.
- Returns
- X
Definition at line 130 of file line_iterator.hpp.
Referenced by nav2_route::CollisionMonitor::backoutValidEndPoint(), nav2_route::GoalIntentSearch::LoSCollisionChecker::isInCollision(), and nav2_route::CollisionMonitor::isInCollision().
◆ getX0()
|
inline |
◆ getX1()
|
inline |
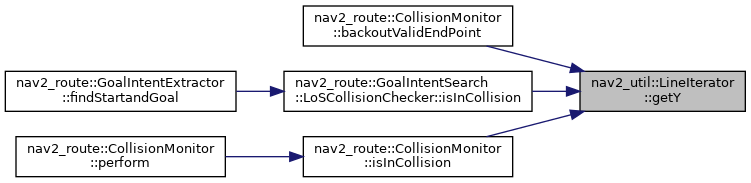
◆ getY()
|
inline |
Get current Y value.
- Returns
- Y
Definition at line 139 of file line_iterator.hpp.
Referenced by nav2_route::CollisionMonitor::backoutValidEndPoint(), nav2_route::GoalIntentSearch::LoSCollisionChecker::isInCollision(), and nav2_route::CollisionMonitor::isInCollision().
◆ getY0()
|
inline |
◆ getY1()
|
inline |
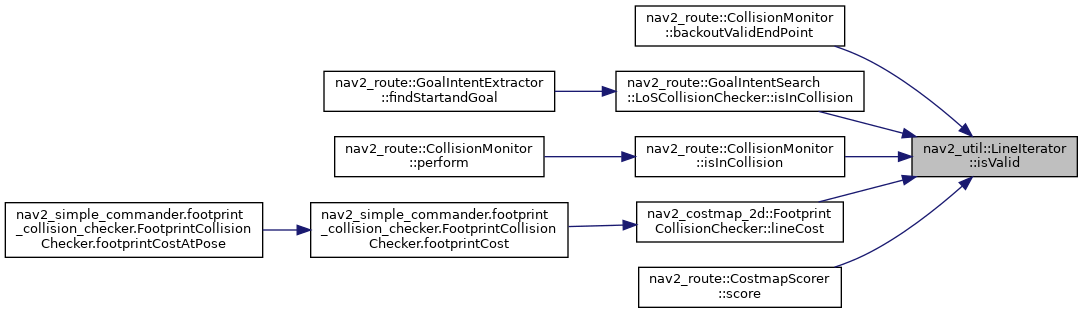
◆ isValid()
|
inline |
If the iterator is valid.
- Returns
- bool If valid
Definition at line 104 of file line_iterator.hpp.
Referenced by nav2_route::CollisionMonitor::backoutValidEndPoint(), nav2_route::GoalIntentSearch::LoSCollisionChecker::isInCollision(), nav2_route::CollisionMonitor::isInCollision(), nav2_costmap_2d::FootprintCollisionChecker< CostmapT >::lineCost(), and nav2_route::CostmapScorer::score().
The documentation for this class was generated from the following file:
- nav2_util/include/nav2_util/line_iterator.hpp