A costmap downsampler for more efficient path planning. More...
#include <nav2_smac_planner/include/nav2_smac_planner/costmap_downsampler.hpp>
Public Member Functions | |
| CostmapDownsampler () | |
| A constructor for CostmapDownsampler. | |
| ~CostmapDownsampler () | |
| A destructor for CostmapDownsampler. | |
| void | on_configure (const nav2::LifecycleNode::WeakPtr &node, const std::string &global_frame, const std::string &topic_name, nav2_costmap_2d::Costmap2D *const costmap, const unsigned int &downsampling_factor, const bool &use_min_cost_neighbor=false) |
| Configure the downsampled costmap object and the ROS publisher. More... | |
| void | on_activate () |
| Activate the publisher of the downsampled costmap. | |
| void | on_deactivate () |
| Deactivate the publisher of the downsampled costmap. | |
| void | on_cleanup () |
| Cleanup the publisher of the downsampled costmap. | |
| nav2_costmap_2d::Costmap2D * | downsample (const unsigned int &downsampling_factor) |
| Downsample the given costmap by the downsampling factor, and publish the downsampled costmap. More... | |
| void | resizeCostmap () |
| Resize the downsampled costmap. Used in case the costmap changes and we need to update the downsampled version. | |
Protected Member Functions | |
| void | updateCostmapSize () |
| Update the sizes X-Y of the costmap and its downsampled version. | |
| void | setCostOfCell (const unsigned int &new_mx, const unsigned int &new_my) |
| Explore all subcells of the original costmap and assign the max cost to the new (downsampled) cell. More... | |
Protected Attributes | |
| unsigned int | _size_x |
| unsigned int | _size_y |
| unsigned int | _downsampled_size_x |
| unsigned int | _downsampled_size_y |
| unsigned int | _downsampling_factor |
| bool | _use_min_cost_neighbor |
| float | _downsampled_resolution |
| nav2_costmap_2d::Costmap2D * | _costmap |
| std::unique_ptr< nav2_costmap_2d::Costmap2D > | _downsampled_costmap |
| std::unique_ptr< nav2_costmap_2d::Costmap2DPublisher > | _downsampled_costmap_pub |
Detailed Description
A costmap downsampler for more efficient path planning.
Definition at line 31 of file costmap_downsampler.hpp.
Member Function Documentation
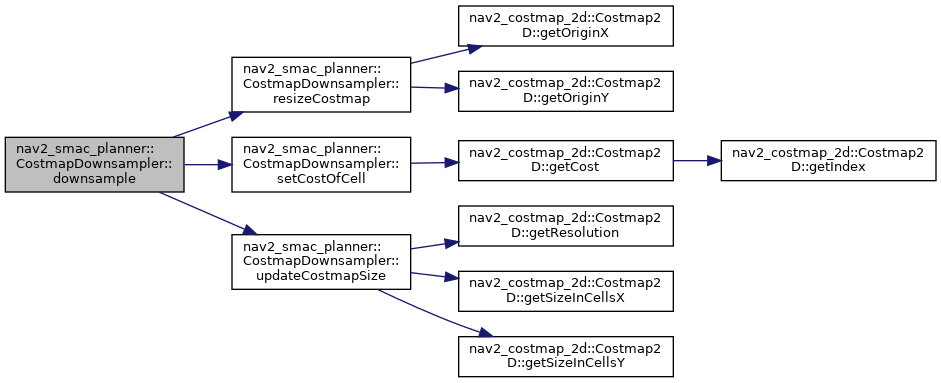
◆ downsample()
| nav2_costmap_2d::Costmap2D * nav2_smac_planner::CostmapDownsampler::downsample | ( | const unsigned int & | downsampling_factor | ) |
Downsample the given costmap by the downsampling factor, and publish the downsampled costmap.
- Parameters
-
downsampling_factor Multiplier for the costmap resolution
- Returns
- A ptr to the downsampled costmap
Definition at line 80 of file costmap_downsampler.cpp.
References resizeCostmap(), setCostOfCell(), and updateCostmapSize().
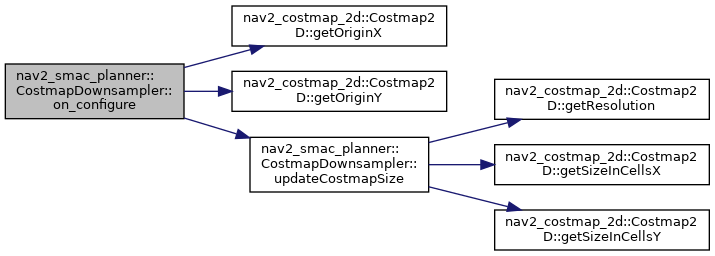
◆ on_configure()
| void nav2_smac_planner::CostmapDownsampler::on_configure | ( | const nav2::LifecycleNode::WeakPtr & | node, |
| const std::string & | global_frame, | ||
| const std::string & | topic_name, | ||
| nav2_costmap_2d::Costmap2D *const | costmap, | ||
| const unsigned int & | downsampling_factor, | ||
| const bool & | use_min_cost_neighbor = false |
||
| ) |
Configure the downsampled costmap object and the ROS publisher.
- Parameters
-
node Lifecycle node pointer global_frame The ID of the global frame used by the costmap topic_name The name of the topic to publish the downsampled costmap costmap The costmap we want to downsample downsampling_factor Multiplier for the costmap resolution use_min_cost_neighbor If true, min function is used instead of max for downsampling
Definition at line 36 of file costmap_downsampler.cpp.
References nav2_costmap_2d::Costmap2D::getOriginX(), nav2_costmap_2d::Costmap2D::getOriginY(), and updateCostmapSize().
◆ setCostOfCell()
|
protected |
Explore all subcells of the original costmap and assign the max cost to the new (downsampled) cell.
- Parameters
-
new_mx The X-coordinate of the cell in the new costmap new_my The Y-coordinate of the cell in the new costmap
Definition at line 126 of file costmap_downsampler.cpp.
References nav2_costmap_2d::Costmap2D::getCost().
Referenced by downsample().


The documentation for this class was generated from the following files:
- nav2_smac_planner/include/nav2_smac_planner/costmap_downsampler.hpp
- nav2_smac_planner/src/costmap_downsampler.cpp