Extracts the start and goal nodes in the graph to use for the routing request from the action request. This may use additional information about the environment or simply find the corresponding nodes specified in the request. More...
#include <nav2_route/include/nav2_route/goal_intent_extractor.hpp>
Public Member Functions | |
| GoalIntentExtractor ()=default | |
| Constructor. | |
| ~GoalIntentExtractor ()=default | |
| Destructor. | |
| void | configure (nav2::LifecycleNode::SharedPtr node, Graph &graph, GraphToIDMap *id_to_graph_map, std::shared_ptr< tf2_ros::Buffer > tf, std::shared_ptr< nav2_costmap_2d::CostmapSubscriber > costmap_subscriber, const std::string &route_frame, const std::string &base_frame) |
| Configure extractor. More... | |
| void | setGraph (Graph &graph, GraphToIDMap *id_to_graph_map) |
| Sets a new graph when updated. More... | |
| geometry_msgs::msg::PoseStamped | transformPose (geometry_msgs::msg::PoseStamped &pose, const std::string &frame_id) |
| Transforms a pose into the route frame. More... | |
| template<typename GoalT > | |
| NodeExtents | findStartandGoal (const std::shared_ptr< const GoalT > goal) |
| Main API to find the start and goal graph IDX (not IDs) for routing. More... | |
| template<typename GoalT > | |
| Route | pruneStartandGoal (const Route &input_route, const std::shared_ptr< const GoalT > goal, ReroutingState &rerouting_info) |
| Prune the start and end nodes in a route if the start or goal poses, respectively, are already along the route to avoid backtracking. More... | |
| void | overrideStart (const geometry_msgs::msg::PoseStamped &start_pose) |
| Override the start pose for use in pruning if it is externally overridden Usually by the rerouting logic. More... | |
| geometry_msgs::msg::PoseStamped | getStart () |
| gets the desired start pose More... | |
Protected Attributes | |
| rclcpp::Logger | logger_ {rclcpp::get_logger("GoalIntentExtractor")} |
| std::shared_ptr< NodeSpatialTree > | node_spatial_tree_ |
| GraphToIDMap * | id_to_graph_map_ |
| Graph * | graph_ |
| std::shared_ptr< tf2_ros::Buffer > | tf_ |
| std::shared_ptr< nav2_costmap_2d::CostmapSubscriber > | costmap_subscriber_ |
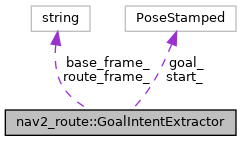
| std::string | route_frame_ |
| std::string | base_frame_ |
| geometry_msgs::msg::PoseStamped | start_ |
| geometry_msgs::msg::PoseStamped | goal_ |
| bool | prune_goal_ |
| bool | enable_search_ |
| int | max_nn_search_iterations_ |
| float | max_dist_from_edge_ |
| float | min_dist_from_goal_ |
| float | min_dist_from_start_ |
Detailed Description
Extracts the start and goal nodes in the graph to use for the routing request from the action request. This may use additional information about the environment or simply find the corresponding nodes specified in the request.
Definition at line 44 of file goal_intent_extractor.hpp.
Member Function Documentation
◆ configure()
| void nav2_route::GoalIntentExtractor::configure | ( | nav2::LifecycleNode::SharedPtr | node, |
| Graph & | graph, | ||
| GraphToIDMap * | id_to_graph_map, | ||
| std::shared_ptr< tf2_ros::Buffer > | tf, | ||
| std::shared_ptr< nav2_costmap_2d::CostmapSubscriber > | costmap_subscriber, | ||
| const std::string & | route_frame, | ||
| const std::string & | base_frame | ||
| ) |
Configure extractor.
- Parameters
-
node Node to use to create any interface needed graph Graph to populate kD tree using id_to_graph_map Remapping vector to correlate nodeIDs tf TF buffer for transformations costmap_subscriber Costmap subscriber to use for traversability route_frame Planning frame base_frame Robot reference frame
Definition at line 26 of file goal_intent_extractor.cpp.
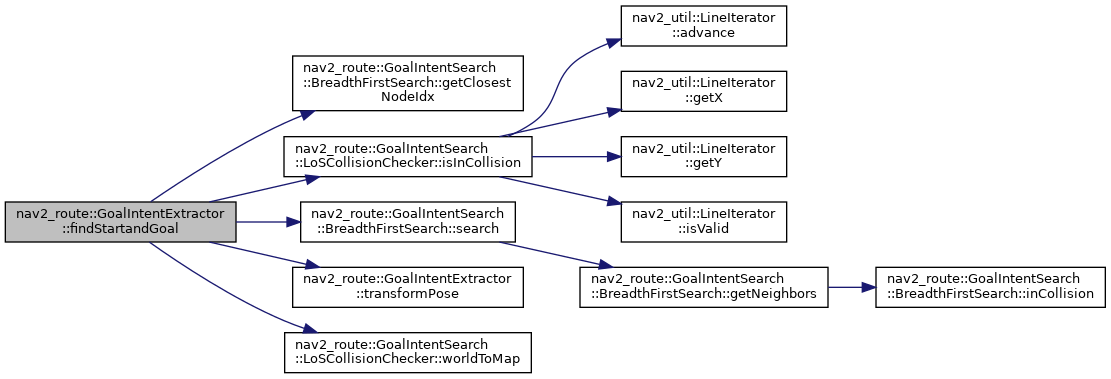
◆ findStartandGoal()
| NodeExtents nav2_route::GoalIntentExtractor::findStartandGoal | ( | const std::shared_ptr< const GoalT > | goal | ) |
Main API to find the start and goal graph IDX (not IDs) for routing.
- Parameters
-
goal Action request goal
- Returns
- start, goal node IDx
Definition at line 106 of file goal_intent_extractor.cpp.
References nav2_route::GoalIntentSearch::BreadthFirstSearch::getClosestNodeIdx(), nav2_route::GoalIntentSearch::LoSCollisionChecker::isInCollision(), nav2_route::GoalIntentSearch::BreadthFirstSearch::search(), transformPose(), and nav2_route::GoalIntentSearch::LoSCollisionChecker::worldToMap().
◆ getStart()
| geometry_msgs::msg::PoseStamped nav2_route::GoalIntentExtractor::getStart | ( | ) |
gets the desired start pose
- Returns
- PoseStamped of start pose
Definition at line 297 of file goal_intent_extractor.cpp.
◆ overrideStart()
| void nav2_route::GoalIntentExtractor::overrideStart | ( | const geometry_msgs::msg::PoseStamped & | start_pose | ) |
Override the start pose for use in pruning if it is externally overridden Usually by the rerouting logic.
- Parameters
-
start_pose Starting pose of robot to prune using
Definition at line 98 of file goal_intent_extractor.cpp.
◆ pruneStartandGoal()
| Route nav2_route::GoalIntentExtractor::pruneStartandGoal | ( | const Route & | input_route, |
| const std::shared_ptr< const GoalT > | goal, | ||
| ReroutingState & | rerouting_info | ||
| ) |
Prune the start and end nodes in a route if the start or goal poses, respectively, are already along the route to avoid backtracking.
- Parameters
-
inpute_route Route to prune goal Action request goal first_time If this is the first time routing
- Returns
- Pruned route
Definition at line 228 of file goal_intent_extractor.cpp.
◆ setGraph()
| void nav2_route::GoalIntentExtractor::setGraph | ( | Graph & | graph, |
| GraphToIDMap * | id_to_graph_map | ||
| ) |
Sets a new graph when updated.
- Parameters
-
graph Graph to populate kD tree using graph id_to_graph_map to get graph IDX for node IDs
Definition at line 75 of file goal_intent_extractor.cpp.
◆ transformPose()
| geometry_msgs::msg::PoseStamped nav2_route::GoalIntentExtractor::transformPose | ( | geometry_msgs::msg::PoseStamped & | pose, |
| const std::string & | frame_id | ||
| ) |
Transforms a pose into the route frame.
- Parameters
-
pose Pose to transform (e.g. start, goal) frame_id Frame to transform to
Definition at line 82 of file goal_intent_extractor.cpp.
Referenced by findStartandGoal().

The documentation for this class was generated from the following files:
- nav2_route/include/nav2_route/goal_intent_extractor.hpp
- nav2_route/src/goal_intent_extractor.cpp