This class hosts variety of plugins of different algorithms to complete control tasks from the exposed FollowPath action server. More...
#include <nav2_controller/include/nav2_controller/controller_server.hpp>
Public Types | |
| using | ControllerMap = std::unordered_map< std::string, nav2_core::Controller::Ptr > |
| using | GoalCheckerMap = std::unordered_map< std::string, nav2_core::GoalChecker::Ptr > |
| using | ProgressCheckerMap = std::unordered_map< std::string, nav2_core::ProgressChecker::Ptr > |
 Public Types inherited from nav2::LifecycleNode Public Types inherited from nav2::LifecycleNode | |
| using | SharedPtr = std::shared_ptr< nav2::LifecycleNode > |
| using | WeakPtr = std::weak_ptr< nav2::LifecycleNode > |
| using | SharedConstPointer = std::shared_ptr< const nav2::LifecycleNode > |
Public Member Functions | |
| ControllerServer (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| Constructor for nav2_controller::ControllerServer. More... | |
| ~ControllerServer () | |
| Destructor for nav2_controller::ControllerServer. | |
| Public Member Functions inherited from nav2::LifecycleNode | |
| LifecycleNode (const std::string &node_name, const std::string &ns, const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A lifecycle node constructor. More... | |
| LifecycleNode (const std::string &node_name, const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A lifecycle node constructor with no namespace. More... | |
| template<typename ParameterT > | |
| ParameterT | declare_or_get_parameter (const std::string ¶meter_name, const ParameterDescriptor ¶meter_descriptor=ParameterDescriptor()) |
| Declares or gets a parameter with specified type (not value). If the parameter is already declared, returns its value; otherwise declares it with the specified type. More... | |
| template<typename ParamType > | |
| ParamType | declare_or_get_parameter (const std::string ¶meter_name, const ParamType &default_value, const ParameterDescriptor ¶meter_descriptor=ParameterDescriptor()) |
| Declares or gets a parameter. If the parameter is already declared, returns its value; otherwise declares it and returns the default value. More... | |
| template<typename MessageT , typename CallbackT > | |
| nav2::Subscription< MessageT >::SharedPtr | create_subscription (const std::string &topic_name, CallbackT &&callback, const rclcpp::QoS &qos=nav2::qos::StandardTopicQoS(), const rclcpp::CallbackGroup::SharedPtr &callback_group=nullptr) |
| Create a subscription to a topic using Nav2 QoS profiles and SubscriptionOptions. More... | |
| template<typename MessageT > | |
| nav2::Publisher< MessageT >::SharedPtr | create_publisher (const std::string &topic_name, const rclcpp::QoS &qos=nav2::qos::StandardTopicQoS(), const rclcpp::CallbackGroup::SharedPtr &callback_group=nullptr) |
| Create a publisher to a topic using Nav2 QoS profiles and PublisherOptions. More... | |
| template<typename ServiceT > | |
| nav2::ServiceClient< ServiceT >::SharedPtr | create_client (const std::string &service_name, bool use_internal_executor=false) |
| Create a ServiceClient to interface with a service. More... | |
| template<typename ServiceT > | |
| nav2::ServiceServer< ServiceT >::SharedPtr | create_service (const std::string &service_name, typename nav2::ServiceServer< ServiceT >::CallbackType cb, rclcpp::CallbackGroup::SharedPtr callback_group=nullptr) |
| Create a ServiceServer to host with a service. More... | |
| template<typename ActionT > | |
| nav2::SimpleActionServer< ActionT >::SharedPtr | create_action_server (const std::string &action_name, typename nav2::SimpleActionServer< ActionT >::ExecuteCallback execute_callback, typename nav2::SimpleActionServer< ActionT >::CompletionCallback compl_cb=nullptr, std::chrono::milliseconds server_timeout=std::chrono::milliseconds(500), bool spin_thread=false, const bool realtime=false) |
| Create a SimpleActionServer to host with an action. More... | |
| template<typename ActionT > | |
| nav2::ActionClient< ActionT >::SharedPtr | create_action_client (const std::string &action_name, rclcpp::CallbackGroup::SharedPtr callback_group=nullptr) |
| Create a ActionClient to call an action using. More... | |
| nav2::LifecycleNode::SharedPtr | shared_from_this () |
| Get a shared pointer of this. | |
| nav2::LifecycleNode::WeakPtr | weak_from_this () |
| Get a shared pointer of this. | |
| nav2::CallbackReturn | on_error (const rclcpp_lifecycle::State &) |
| Abstracted on_error state transition callback, since unimplemented as of 2020 in the managed ROS2 node state machine. More... | |
| void | autostart () |
| Automatically configure and active the node. | |
| virtual void | on_rcl_preshutdown () |
| Perform preshutdown activities before our Context is shutdown. Note that this is related to our Context's shutdown sequence, not the lifecycle node state machine. | |
| void | createBond () |
| Create bond connection to lifecycle manager. | |
| void | destroyBond () |
| Destroy bond connection to lifecycle manager. | |
Protected Types | |
| using | Action = nav2_msgs::action::FollowPath |
| using | ActionServer = nav2::SimpleActionServer< Action > |
Protected Member Functions | |
| nav2::CallbackReturn | on_configure (const rclcpp_lifecycle::State &state) override |
| Configures controller parameters and member variables. More... | |
| nav2::CallbackReturn | on_activate (const rclcpp_lifecycle::State &state) override |
| Activates member variables. More... | |
| nav2::CallbackReturn | on_deactivate (const rclcpp_lifecycle::State &state) override |
| Deactivates member variables. More... | |
| nav2::CallbackReturn | on_cleanup (const rclcpp_lifecycle::State &state) override |
| Calls clean up states and resets member variables. More... | |
| nav2::CallbackReturn | on_shutdown (const rclcpp_lifecycle::State &state) override |
| Called when in Shutdown state. More... | |
| void | computeControl () |
| FollowPath action server callback. Handles action server updates and spins server until goal is reached. More... | |
| bool | findControllerId (const std::string &c_name, std::string &name) |
| Find the valid controller ID name for the given request. More... | |
| bool | findGoalCheckerId (const std::string &c_name, std::string &name) |
| Find the valid goal checker ID name for the specified parameter. More... | |
| bool | findProgressCheckerId (const std::string &c_name, std::string &name) |
| Find the valid progress checker ID name for the specified parameter. More... | |
| void | setPlannerPath (const nav_msgs::msg::Path &path) |
| Assigns path to controller. More... | |
| void | computeAndPublishVelocity () |
| Calculates velocity and publishes to "cmd_vel" topic. | |
| void | updateGlobalPath () |
| Calls setPlannerPath method with an updated path received from action server. | |
| void | publishVelocity (const geometry_msgs::msg::TwistStamped &velocity) |
| Calls velocity publisher to publish the velocity on "cmd_vel" topic. More... | |
| void | publishZeroVelocity () |
| Calls velocity publisher to publish zero velocity. | |
| void | onGoalExit (bool force_stop) |
| Called on goal exit. | |
| bool | isGoalReached () |
| Checks if goal is reached. More... | |
| bool | getRobotPose (geometry_msgs::msg::PoseStamped &pose) |
| Obtain current pose of the robot in costmap's frame. More... | |
| double | getThresholdedVelocity (double velocity, double threshold) |
| get the thresholded velocity More... | |
| geometry_msgs::msg::Twist | getThresholdedTwist (const geometry_msgs::msg::Twist &twist) |
| get the thresholded Twist More... | |
| rcl_interfaces::msg::SetParametersResult | dynamicParametersCallback (std::vector< rclcpp::Parameter > parameters) |
| Callback executed when a parameter change is detected. More... | |
| Protected Member Functions inherited from nav2::LifecycleNode | |
| void | printLifecycleNodeNotification () |
| Print notifications for lifecycle node. | |
| void | register_rcl_preshutdown_callback () |
| void | runCleanups () |
Protected Attributes | |
| ActionServer::SharedPtr | action_server_ |
| rclcpp::node_interfaces::OnSetParametersCallbackHandle::SharedPtr | dyn_params_handler_ |
| std::mutex | dynamic_params_lock_ |
| std::shared_ptr< nav2_costmap_2d::Costmap2DROS > | costmap_ros_ |
| std::unique_ptr< nav2::NodeThread > | costmap_thread_ |
| std::unique_ptr< nav2_util::OdomSmoother > | odom_sub_ |
| std::unique_ptr< nav2_util::TwistPublisher > | vel_publisher_ |
| nav2::Subscription< nav2_msgs::msg::SpeedLimit >::SharedPtr | speed_limit_sub_ |
| nav2::Publisher< nav2_msgs::msg::TrackingFeedback >::SharedPtr | tracking_feedback_pub_ |
| pluginlib::ClassLoader< nav2_core::ProgressChecker > | progress_checker_loader_ |
| ProgressCheckerMap | progress_checkers_ |
| std::vector< std::string > | default_progress_checker_ids_ |
| std::vector< std::string > | default_progress_checker_types_ |
| std::vector< std::string > | progress_checker_ids_ |
| std::vector< std::string > | progress_checker_types_ |
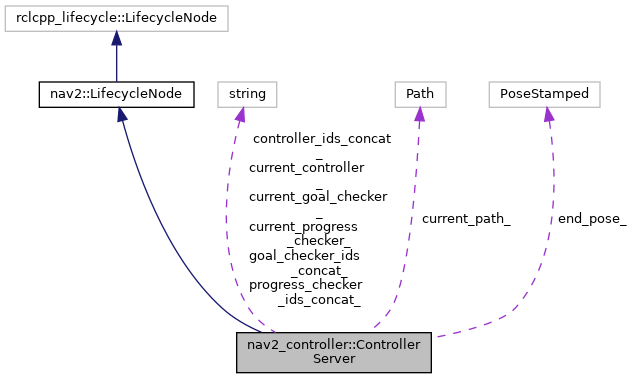
| std::string | progress_checker_ids_concat_ |
| std::string | current_progress_checker_ |
| pluginlib::ClassLoader< nav2_core::GoalChecker > | goal_checker_loader_ |
| GoalCheckerMap | goal_checkers_ |
| std::vector< std::string > | default_goal_checker_ids_ |
| std::vector< std::string > | default_goal_checker_types_ |
| std::vector< std::string > | goal_checker_ids_ |
| std::vector< std::string > | goal_checker_types_ |
| std::string | goal_checker_ids_concat_ |
| std::string | current_goal_checker_ |
| pluginlib::ClassLoader< nav2_core::Controller > | lp_loader_ |
| ControllerMap | controllers_ |
| std::vector< std::string > | default_ids_ |
| std::vector< std::string > | default_types_ |
| std::vector< std::string > | controller_ids_ |
| std::vector< std::string > | controller_types_ |
| std::string | controller_ids_concat_ |
| std::string | current_controller_ |
| double | controller_frequency_ |
| double | min_x_velocity_threshold_ |
| double | min_y_velocity_threshold_ |
| double | min_theta_velocity_threshold_ |
| double | search_window_ |
| size_t | start_index_ |
| double | failure_tolerance_ |
| bool | use_realtime_priority_ |
| bool | publish_zero_velocity_ |
| rclcpp::Duration | costmap_update_timeout_ |
| geometry_msgs::msg::PoseStamped | end_pose_ |
| geometry_msgs::msg::PoseStamped | transformed_end_pose_ |
| rclcpp::Time | last_valid_cmd_time_ |
| nav_msgs::msg::Path | current_path_ |
| Protected Attributes inherited from nav2::LifecycleNode | |
| std::unique_ptr< rclcpp::PreShutdownCallbackHandle > | rcl_preshutdown_cb_handle_ {nullptr} |
| std::shared_ptr< bond::Bond > | bond_ {nullptr} |
| double | bond_heartbeat_period {0.1} |
| rclcpp::TimerBase::SharedPtr | autostart_timer_ |
Detailed Description
This class hosts variety of plugins of different algorithms to complete control tasks from the exposed FollowPath action server.
Definition at line 50 of file controller_server.hpp.
Constructor & Destructor Documentation
◆ ControllerServer()
|
explicit |
Constructor for nav2_controller::ControllerServer.
- Parameters
-
options Additional options to control creation of the node.
Definition at line 36 of file controller_server.cpp.
Member Function Documentation
◆ computeControl()
|
protected |
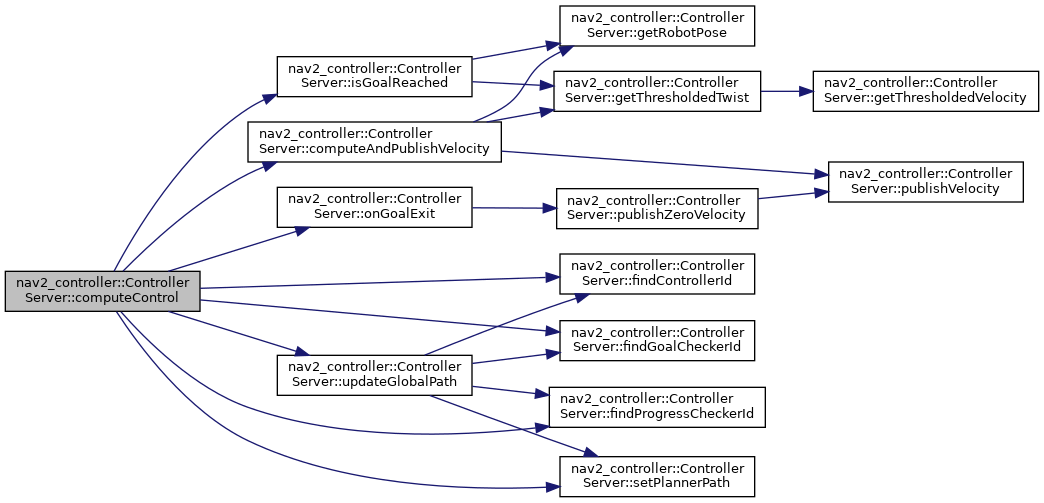
FollowPath action server callback. Handles action server updates and spins server until goal is reached.
Provides global path to controller received from action client. Twist velocities for the robot are calculated and published using controller at the specified rate till the goal is reached.
- Exceptions
-
nav2_core::PlannerException
Definition at line 413 of file controller_server.cpp.
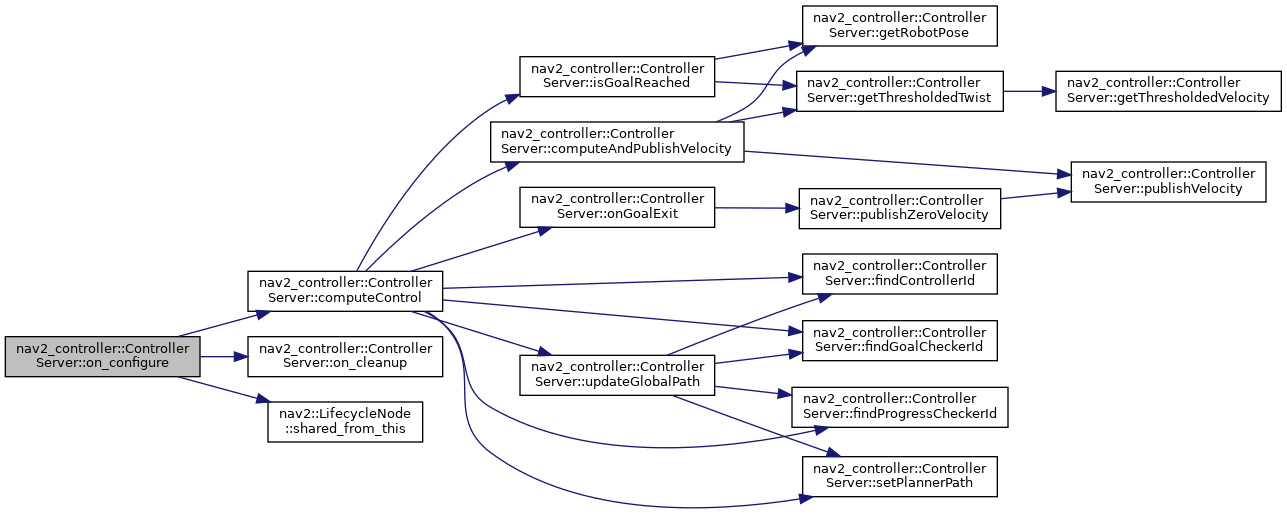
References computeAndPublishVelocity(), findControllerId(), findGoalCheckerId(), findProgressCheckerId(), isGoalReached(), onGoalExit(), setPlannerPath(), and updateGlobalPath().
Referenced by on_configure().

◆ dynamicParametersCallback()
|
protected |
Callback executed when a parameter change is detected.
- Parameters
-
event ParameterEvent message
Definition at line 829 of file controller_server.cpp.
Referenced by on_activate().

◆ findControllerId()
|
protected |
Find the valid controller ID name for the given request.
- Parameters
-
c_name The requested controller name name Reference to the name to use for control if any valid available
- Returns
- bool Whether it found a valid controller to use
Definition at line 335 of file controller_server.cpp.
Referenced by computeControl(), and updateGlobalPath().

◆ findGoalCheckerId()
|
protected |
Find the valid goal checker ID name for the specified parameter.
- Parameters
-
c_name The goal checker name name Reference to the name to use for goal checking if any valid available
- Returns
- bool Whether it found a valid goal checker to use
Definition at line 361 of file controller_server.cpp.
Referenced by computeControl(), and updateGlobalPath().

◆ findProgressCheckerId()
|
protected |
Find the valid progress checker ID name for the specified parameter.
- Parameters
-
c_name The progress checker name name Reference to the name to use for progress checking if any valid available
- Returns
- bool Whether it found a valid progress checker to use
Definition at line 387 of file controller_server.cpp.
Referenced by computeControl(), and updateGlobalPath().

◆ getRobotPose()
|
protected |
Obtain current pose of the robot in costmap's frame.
- Parameters
-
pose To store current pose of the robot
- Returns
- true if able to obtain current pose of the robot, else false
Definition at line 810 of file controller_server.cpp.
Referenced by computeAndPublishVelocity(), and isGoalReached().

◆ getThresholdedTwist()
|
inlineprotected |
get the thresholded Twist
- Parameters
-
Twist The current Twist from odometry
- Returns
- Twist Twist after thresholds applied
Definition at line 212 of file controller_server.hpp.
References getThresholdedVelocity().
Referenced by computeAndPublishVelocity(), and isGoalReached().


◆ getThresholdedVelocity()
|
inlineprotected |
get the thresholded velocity
- Parameters
-
velocity The current velocity from odometry threshold The minimum velocity to return non-zero
- Returns
- double velocity value
Definition at line 202 of file controller_server.hpp.
Referenced by getThresholdedTwist().

◆ isGoalReached()
|
protected |
Checks if goal is reached.
- Returns
- true or false
Definition at line 795 of file controller_server.cpp.
References getRobotPose(), and getThresholdedTwist().
Referenced by computeControl().


◆ on_activate()
|
overrideprotected |
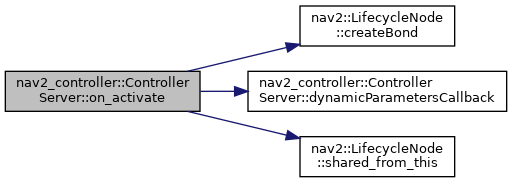
Activates member variables.
Activates controller, costmap, velocity publisher and follow path action server
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
Definition at line 241 of file controller_server.cpp.
References nav2::LifecycleNode::createBond(), dynamicParametersCallback(), and nav2::LifecycleNode::shared_from_this().
◆ on_cleanup()
|
overrideprotected |
Calls clean up states and resets member variables.
Controller and costmap clean up state is called, and resets rest of the variables
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
Definition at line 301 of file controller_server.cpp.
Referenced by on_configure().

◆ on_configure()
|
overrideprotected |
Configures controller parameters and member variables.
Configures controller plugin and costmap; Initialize odom subscriber, velocity publisher and follow path action server.
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
- Exceptions
-
pluginlib::PluginlibException When failed to initialize controller plugin
Definition at line 67 of file controller_server.cpp.
References computeControl(), nav2::LifecycleNode::declare_or_get_parameter(), on_cleanup(), and nav2::LifecycleNode::shared_from_this().
◆ on_deactivate()
|
overrideprotected |
Deactivates member variables.
Deactivates follow path action server, controller, costmap and velocity publisher. Before calling deactivate state, velocity is being set to zero.
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
Definition at line 268 of file controller_server.cpp.
References nav2::LifecycleNode::destroyBond(), and publishZeroVelocity().

◆ on_shutdown()
|
overrideprotected |
Called when in Shutdown state.
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
Definition at line 329 of file controller_server.cpp.
◆ publishVelocity()
|
protected |
Calls velocity publisher to publish the velocity on "cmd_vel" topic.
- Parameters
-
velocity Twist velocity to be published
Definition at line 757 of file controller_server.cpp.
Referenced by computeAndPublishVelocity(), and publishZeroVelocity().

◆ setPlannerPath()
|
protected |
Assigns path to controller.
- Parameters
-
path Path received from action server
Definition at line 583 of file controller_server.cpp.
Referenced by computeControl(), and updateGlobalPath().

The documentation for this class was generated from the following files:
- nav2_controller/include/nav2_controller/controller_server.hpp
- nav2_controller/src/controller_server.cpp