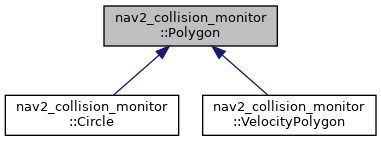
Basic polygon shape class. For STOP/SLOWDOWN/LIMIT model it represents zone around the robot while for APPROACH model it represents robot footprint. More...
#include <nav2_collision_monitor/include/nav2_collision_monitor/polygon.hpp>
Public Member Functions | |
| Polygon (const nav2::LifecycleNode::WeakPtr &node, const std::string &polygon_name, const std::shared_ptr< tf2_ros::Buffer > tf_buffer, const std::string &base_frame_id, const tf2::Duration &transform_tolerance) | |
| Polygon constructor. More... | |
| virtual | ~Polygon () |
| Polygon destructor. | |
| bool | configure () |
| Shape configuration routine. Obtains ROS-parameters related to shape object and creates polygon lifecycle publisher. More... | |
| void | activate () |
| Activates polygon lifecycle publisher. | |
| void | deactivate () |
| Deactivates polygon lifecycle publisher. | |
| std::string | getName () const |
| Returns the name of polygon. More... | |
| ActionType | getActionType () const |
| Obtains polygon action type. More... | |
| bool | getEnabled () const |
| Obtains polygon enabled state. More... | |
| int | getMinPoints () const |
| Obtains polygon minimum points to enter inside polygon causing the action. More... | |
| double | getSlowdownRatio () const |
| Obtains speed slowdown ratio for current polygon. Applicable for SLOWDOWN model. More... | |
| double | getLinearLimit () const |
| Obtains speed linear limit for current polygon. Applicable for LIMIT model. More... | |
| double | getAngularLimit () const |
| Obtains speed angular z limit for current polygon. Applicable for LIMIT model. More... | |
| double | getTimeBeforeCollision () const |
| Obtains required time before collision for current polygon. Applicable for APPROACH model. More... | |
| virtual void | getPolygon (std::vector< Point > &poly) const |
| Gets polygon points. More... | |
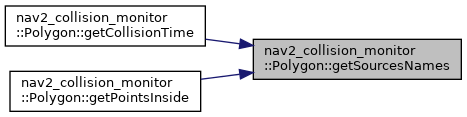
| std::vector< std::string > | getSourcesNames () const |
| Obtains the name of the observation sources for current polygon. More... | |
| virtual bool | isShapeSet () |
| Returns true if polygon points were set. Otherwise, prints a warning and returns false. | |
| virtual void | updatePolygon (const Velocity &) |
| Updates polygon from footprint subscriber (if any) | |
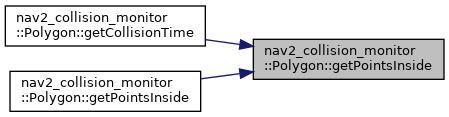
| virtual int | getPointsInside (const std::vector< Point > &points) const |
| Gets number of points inside given polygon. More... | |
| virtual int | getPointsInside (const std::unordered_map< std::string, std::vector< Point >> &sources_collision_points_map) const |
| Gets number of points inside given polygon. More... | |
| double | getCollisionTime (const std::unordered_map< std::string, std::vector< Point >> &sources_collision_points_map, const Velocity &velocity) const |
| Obtains estimated (simulated) time before a collision. Applicable for APPROACH model. More... | |
| void | publish () |
| Publishes polygon message into a its own topic. | |
Protected Member Functions | |
| bool | getCommonParameters (std::string &polygon_sub_topic, std::string &polygon_pub_topic, std::string &footprint_topic, bool use_dynamic_sub=false) |
| Supporting routine obtaining ROS-parameters common for all shapes. More... | |
| virtual bool | getParameters (std::string &polygon_sub_topic, std::string &polygon_pub_topic, std::string &footprint_topic) |
| Supporting routine obtaining polygon-specific ROS-parameters. More... | |
| virtual void | createSubscription (std::string &polygon_sub_topic) |
| Creates polygon or radius topic subscription. More... | |
| void | updatePolygon (geometry_msgs::msg::PolygonStamped::ConstSharedPtr msg) |
| Updates polygon from geometry_msgs::msg::PolygonStamped message. More... | |
| void | polygonCallback (geometry_msgs::msg::PolygonStamped::ConstSharedPtr msg) |
| Dynamic polygon callback. More... | |
| rcl_interfaces::msg::SetParametersResult | dynamicParametersCallback (std::vector< rclcpp::Parameter > parameters) |
| Callback executed when a parameter change is detected. More... | |
| bool | getPolygonFromString (std::string &poly_string, std::vector< Point > &polygon) |
| Extracts Polygon points from a string with of the form [[x1,y1],[x2,y2],[x3,y3]...]. More... | |
Protected Attributes | |
| nav2::LifecycleNode::WeakPtr | node_ |
| Collision Monitor node. | |
| rclcpp::Logger | logger_ {rclcpp::get_logger("collision_monitor")} |
| Collision monitor node logger stored for further usage. | |
| rclcpp::node_interfaces::OnSetParametersCallbackHandle::SharedPtr | dyn_params_handler_ |
| Dynamic parameters handler. | |
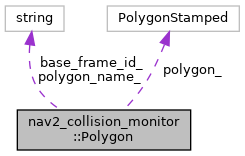
| std::string | polygon_name_ |
| Name of polygon. | |
| ActionType | action_type_ |
| Action type for the polygon. | |
| int | min_points_ |
| Minimum number of data readings within a zone to trigger the action. | |
| double | slowdown_ratio_ |
| Robot slowdown (share of its actual speed) | |
| double | linear_limit_ |
| Robot linear limit. | |
| double | angular_limit_ |
| Robot angular limit. | |
| double | time_before_collision_ |
| Time before collision in seconds. | |
| double | simulation_time_step_ |
| Time step for robot movement simulation. | |
| bool | enabled_ |
| Whether polygon is enabled. | |
| bool | polygon_subscribe_transient_local_ |
| Whether the subscription to polygon topic has transient local QoS durability. | |
| nav2::Subscription< geometry_msgs::msg::PolygonStamped >::SharedPtr | polygon_sub_ |
| Polygon subscription. | |
| std::unique_ptr< nav2_costmap_2d::FootprintSubscriber > | footprint_sub_ |
| Footprint subscriber. | |
| std::vector< std::string > | sources_names_ |
| Name of the observation sources to check for polygon. | |
| std::shared_ptr< tf2_ros::Buffer > | tf_buffer_ |
| TF buffer. | |
| std::string | base_frame_id_ |
| Base frame ID. | |
| tf2::Duration | transform_tolerance_ |
| Transform tolerance. | |
| rclcpp::Clock::SharedPtr | node_clock_ |
| Collision monitor node's clock. | |
| bool | visualize_ |
| Whether to publish the polygon. | |
| geometry_msgs::msg::PolygonStamped | polygon_ |
| Polygon, used for: 1. visualization; 2. storing latest dynamic polygon message. | |
| nav2::Publisher< geometry_msgs::msg::PolygonStamped >::SharedPtr | polygon_pub_ |
| Polygon publisher for visualization purposes. | |
| std::vector< Point > | poly_ |
| Polygon points (vertices) in a base_frame_id_. | |
Detailed Description
Basic polygon shape class. For STOP/SLOWDOWN/LIMIT model it represents zone around the robot while for APPROACH model it represents robot footprint.
Definition at line 42 of file polygon.hpp.
Constructor & Destructor Documentation
◆ Polygon()
| nav2_collision_monitor::Polygon::Polygon | ( | const nav2::LifecycleNode::WeakPtr & | node, |
| const std::string & | polygon_name, | ||
| const std::shared_ptr< tf2_ros::Buffer > | tf_buffer, | ||
| const std::string & | base_frame_id, | ||
| const tf2::Duration & | transform_tolerance | ||
| ) |
Polygon constructor.
- Parameters
-
node Collision Monitor node pointer polygon_name Name of polygon tf_buffer Shared pointer to a TF buffer base_frame_id Robot base frame ID transform_tolerance Transform tolerance
Definition at line 34 of file polygon.cpp.
References logger_, and polygon_name_.
Member Function Documentation
◆ configure()
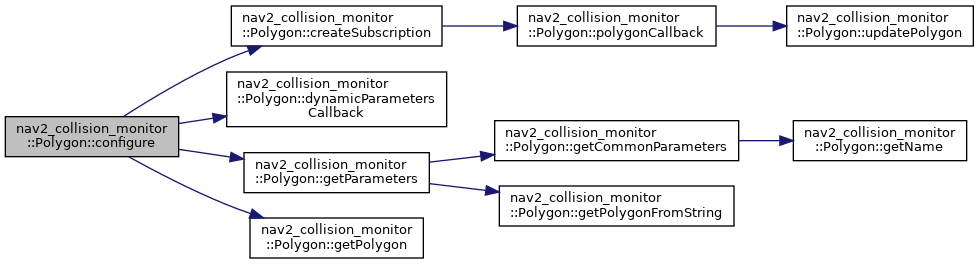
| bool nav2_collision_monitor::Polygon::configure | ( | ) |
Shape configuration routine. Obtains ROS-parameters related to shape object and creates polygon lifecycle publisher.
- Returns
- True in case of everything is configured correctly, or false otherwise
Definition at line 59 of file polygon.cpp.
References base_frame_id_, createSubscription(), dyn_params_handler_, dynamicParametersCallback(), footprint_sub_, getParameters(), getPolygon(), logger_, node_, node_clock_, polygon_, polygon_name_, polygon_pub_, tf_buffer_, transform_tolerance_, and visualize_.
◆ createSubscription()
|
protectedvirtual |
Creates polygon or radius topic subscription.
- Parameters
-
polygon_sub_topic Output name of polygon or radius subscription topic. Empty, if no polygon subscription.
Reimplemented in nav2_collision_monitor::Circle.
Definition at line 479 of file polygon.cpp.
References logger_, node_, polygon_name_, polygon_sub_, polygon_subscribe_transient_local_, and polygonCallback().
Referenced by configure().


◆ dynamicParametersCallback()
|
protected |
Callback executed when a parameter change is detected.
- Parameters
-
event ParameterEvent message
Definition at line 541 of file polygon.cpp.
References enabled_, and polygon_name_.
Referenced by configure().

◆ getActionType()
| ActionType nav2_collision_monitor::Polygon::getActionType | ( | ) | const |
Obtains polygon action type.
- Returns
- Action type for current polygon
Definition at line 128 of file polygon.cpp.
References action_type_.
◆ getAngularLimit()
| double nav2_collision_monitor::Polygon::getAngularLimit | ( | ) | const |
Obtains speed angular z limit for current polygon. Applicable for LIMIT model.
- Returns
- Speed angular limit
Definition at line 153 of file polygon.cpp.
References angular_limit_.
◆ getCollisionTime()
| double nav2_collision_monitor::Polygon::getCollisionTime | ( | const std::unordered_map< std::string, std::vector< Point >> & | sources_collision_points_map, |
| const Velocity & | velocity | ||
| ) | const |
Obtains estimated (simulated) time before a collision. Applicable for APPROACH model.
- Parameters
-
sources_collision_points_map Map containing source name as key, and input array of source's 2D obstacle points as value velocity Simulated robot velocity
- Returns
- Estimated time before a collision. If there is no collision, return value will be negative.
Definition at line 258 of file polygon.cpp.
References getPointsInside(), getSourcesNames(), min_points_, simulation_time_step_, and time_before_collision_.

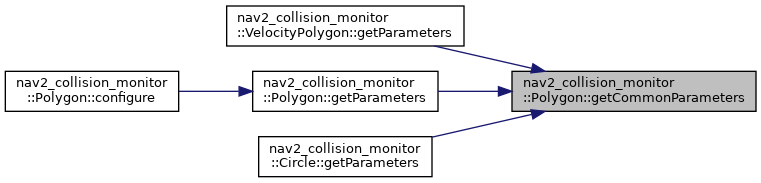
◆ getCommonParameters()
|
protected |
Supporting routine obtaining ROS-parameters common for all shapes.
- Parameters
-
polygon_pub_topic Output name of polygon or radius subscription topic. Empty, if no polygon subscription. polygon_sub_topic Output name of polygon publishing topic footprint_topic Output name of footprint topic. Empty, if no footprint subscription. use_dynamic_sub If false, the parameter polygon_sub_topic or footprint_topic will not be declared
- Returns
- True if all parameters were obtained or false in failure case
Definition at line 321 of file polygon.cpp.
References action_type_, angular_limit_, enabled_, getName(), linear_limit_, logger_, min_points_, node_, polygon_name_, polygon_subscribe_transient_local_, simulation_time_step_, slowdown_ratio_, sources_names_, time_before_collision_, and visualize_.
Referenced by nav2_collision_monitor::VelocityPolygon::getParameters(), getParameters(), and nav2_collision_monitor::Circle::getParameters().

◆ getEnabled()
| bool nav2_collision_monitor::Polygon::getEnabled | ( | ) | const |
Obtains polygon enabled state.
- Returns
- Whether polygon is enabled
Definition at line 133 of file polygon.cpp.
References enabled_.
◆ getLinearLimit()
| double nav2_collision_monitor::Polygon::getLinearLimit | ( | ) | const |
Obtains speed linear limit for current polygon. Applicable for LIMIT model.
- Returns
- Speed linear limit
Definition at line 148 of file polygon.cpp.
References linear_limit_.
◆ getMinPoints()
| int nav2_collision_monitor::Polygon::getMinPoints | ( | ) | const |
Obtains polygon minimum points to enter inside polygon causing the action.
- Returns
- Minimum number of data readings within a zone to trigger the action
Definition at line 138 of file polygon.cpp.
References min_points_.
◆ getName()
| std::string nav2_collision_monitor::Polygon::getName | ( | ) | const |
Returns the name of polygon.
- Returns
- Polygon name
Definition at line 123 of file polygon.cpp.
References polygon_name_.
Referenced by getCommonParameters().

◆ getParameters()
|
protectedvirtual |
Supporting routine obtaining polygon-specific ROS-parameters.
- Parameters
-
polygon_sub_topic Output name of polygon or radius subscription topic. Empty, if no polygon subscription. polygon_pub_topic Output name of polygon publishing topic footprint_topic Output name of footprint topic. Empty, if no footprint subscription.
- Returns
- True if all parameters were obtained or false in failure case
Reimplemented in nav2_collision_monitor::Circle, and nav2_collision_monitor::VelocityPolygon.
Definition at line 435 of file polygon.cpp.
References getCommonParameters(), getPolygonFromString(), logger_, node_, poly_, and polygon_name_.
Referenced by configure().


◆ getPointsInside() [1/2]
|
virtual |
Gets number of points inside given polygon.
- Parameters
-
sources_collision_points_map Map containing source name as key, and input array of source's points to be checked as value
- Returns
- Number of points inside polygon, for sources in map that are associated with current polygon. If there are no points, returns zero value.
Definition at line 240 of file polygon.cpp.
References getPointsInside(), and getSourcesNames().

◆ getPointsInside() [2/2]
|
virtual |
Gets number of points inside given polygon.
- Parameters
-
points Input array of points to be checked
- Returns
- Number of points inside polygon. If there are no points, returns zero value.
Reimplemented in nav2_collision_monitor::Circle.
Definition at line 229 of file polygon.cpp.
References poly_.
Referenced by getCollisionTime(), and getPointsInside().
◆ getPolygon()
|
virtual |
Gets polygon points.
- Parameters
-
poly Output polygon points (vertices)
Reimplemented in nav2_collision_monitor::Circle.
Definition at line 168 of file polygon.cpp.
References poly_.
Referenced by configure().

◆ getPolygonFromString()
|
protected |
Extracts Polygon points from a string with of the form [[x1,y1],[x2,y2],[x3,y3]...].
- Parameters
-
poly_string Input String containing the verteceis of the polygon polygon Output Point vector with all the vertices of the polygon
- Returns
- True if all parameters were obtained or false in failure case
Definition at line 573 of file polygon.cpp.
References logger_.
Referenced by nav2_collision_monitor::VelocityPolygon::getParameters(), and getParameters().

◆ getSlowdownRatio()
| double nav2_collision_monitor::Polygon::getSlowdownRatio | ( | ) | const |
Obtains speed slowdown ratio for current polygon. Applicable for SLOWDOWN model.
- Returns
- Speed slowdown ratio
Definition at line 143 of file polygon.cpp.
References slowdown_ratio_.
◆ getSourcesNames()
| std::vector< std::string > nav2_collision_monitor::Polygon::getSourcesNames | ( | ) | const |
Obtains the name of the observation sources for current polygon.
- Returns
- Names of the observation sources
Definition at line 163 of file polygon.cpp.
References sources_names_.
Referenced by getCollisionTime(), and getPointsInside().
◆ getTimeBeforeCollision()
| double nav2_collision_monitor::Polygon::getTimeBeforeCollision | ( | ) | const |
Obtains required time before collision for current polygon. Applicable for APPROACH model.
- Returns
- Time before collision in seconds
Definition at line 158 of file polygon.cpp.
References time_before_collision_.
◆ polygonCallback()
|
protected |
Dynamic polygon callback.
- Parameters
-
msg Shared pointer to the polygon message
Definition at line 562 of file polygon.cpp.
References logger_, node_clock_, polygon_name_, and updatePolygon().
Referenced by createSubscription().


◆ updatePolygon()
|
protected |
Updates polygon from geometry_msgs::msg::PolygonStamped message.
- Parameters
-
msg Message to update polygon from
Definition at line 502 of file polygon.cpp.
References base_frame_id_, logger_, poly_, polygon_, polygon_name_, tf_buffer_, and transform_tolerance_.
The documentation for this class was generated from the following files:
- nav2_collision_monitor/include/nav2_collision_monitor/polygon.hpp
- nav2_collision_monitor/src/polygon.cpp