This class that smooths cmd_vel velocities for robot bases. More...
#include <nav2_velocity_smoother/include/nav2_velocity_smoother/velocity_smoother.hpp>
Public Member Functions | |
| VelocitySmoother (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A constructor for nav2_velocity_smoother::VelocitySmoother. More... | |
| ~VelocitySmoother () | |
| Destructor for nav2_velocity_smoother::VelocitySmoother. | |
| double | findEtaConstraint (const double v_curr, const double v_cmd, const double accel, const double decel) |
| Find the scale factor, eta, which scales axis into acceleration range. More... | |
| double | applyConstraints (const double v_curr, const double v_cmd, const double accel, const double decel, const double eta) |
| Apply acceleration and scale factor constraints. More... | |
 Public Member Functions inherited from nav2_util::LifecycleNode Public Member Functions inherited from nav2_util::LifecycleNode | |
| LifecycleNode (const std::string &node_name, const std::string &ns="", const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A lifecycle node constructor. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has no integer or floating point range constraints. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const floating_point_range fp_range, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has a floating point range constraint. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const integer_range int_range, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has an integer range constraint. More... | |
| std::shared_ptr< nav2_util::LifecycleNode > | shared_from_this () |
| Get a shared pointer of this. | |
| nav2_util::CallbackReturn | on_error (const rclcpp_lifecycle::State &) |
| Abstracted on_error state transition callback, since unimplemented as of 2020 in the managed ROS2 node state machine. More... | |
| void | autostart () |
| Automatically configure and active the node. | |
| virtual void | on_rcl_preshutdown () |
| Perform preshutdown activities before our Context is shutdown. Note that this is related to our Context's shutdown sequence, not the lifecycle node state machine. | |
| void | createBond () |
| Create bond connection to lifecycle manager. | |
| void | destroyBond () |
| Destroy bond connection to lifecycle manager. | |
Protected Member Functions | |
| nav2_util::CallbackReturn | on_configure (const rclcpp_lifecycle::State &state) override |
| Configures parameters and member variables. More... | |
| nav2_util::CallbackReturn | on_activate (const rclcpp_lifecycle::State &state) override |
| Activates member variables. More... | |
| nav2_util::CallbackReturn | on_deactivate (const rclcpp_lifecycle::State &state) override |
| Deactivates member variables. More... | |
| nav2_util::CallbackReturn | on_cleanup (const rclcpp_lifecycle::State &state) override |
| Calls clean up states and resets member variables. More... | |
| nav2_util::CallbackReturn | on_shutdown (const rclcpp_lifecycle::State &state) override |
| Called when in Shutdown state. More... | |
| void | inputCommandCallback (const geometry_msgs::msg::Twist::SharedPtr msg) |
| Callback for incoming velocity commands. More... | |
| void | inputCommandStampedCallback (const geometry_msgs::msg::TwistStamped::SharedPtr msg) |
| void | smootherTimer () |
| Main worker timer function. | |
| rcl_interfaces::msg::SetParametersResult | dynamicParametersCallback (std::vector< rclcpp::Parameter > parameters) |
| Dynamic reconfigure callback. More... | |
| Protected Member Functions inherited from nav2_util::LifecycleNode | |
| void | printLifecycleNodeNotification () |
| Print notifications for lifecycle node. | |
| void | register_rcl_preshutdown_callback () |
| void | runCleanups () |
Protected Attributes | |
| std::unique_ptr< nav2_util::OdomSmoother > | odom_smoother_ |
| std::unique_ptr< nav2_util::TwistPublisher > | smoothed_cmd_pub_ |
| std::unique_ptr< nav2_util::TwistSubscriber > | cmd_sub_ |
| rclcpp::TimerBase::SharedPtr | timer_ |
| rclcpp::Clock::SharedPtr | clock_ |
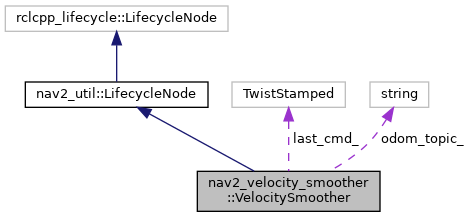
| geometry_msgs::msg::TwistStamped | last_cmd_ |
| geometry_msgs::msg::TwistStamped::SharedPtr | command_ |
| double | smoothing_frequency_ |
| double | odom_duration_ |
| std::string | odom_topic_ |
| bool | open_loop_ |
| bool | stopped_ {true} |
| bool | scale_velocities_ |
| std::vector< double > | max_velocities_ |
| std::vector< double > | min_velocities_ |
| std::vector< double > | max_accels_ |
| std::vector< double > | max_decels_ |
| std::vector< double > | deadband_velocities_ |
| rclcpp::Duration | velocity_timeout_ {0, 0} |
| rclcpp::Time | last_command_time_ |
| rclcpp::node_interfaces::OnSetParametersCallbackHandle::SharedPtr | dyn_params_handler_ |
| Protected Attributes inherited from nav2_util::LifecycleNode | |
| std::unique_ptr< rclcpp::PreShutdownCallbackHandle > | rcl_preshutdown_cb_handle_ {nullptr} |
| std::shared_ptr< bond::Bond > | bond_ {nullptr} |
| double | bond_heartbeat_period |
| rclcpp::TimerBase::SharedPtr | autostart_timer_ |
Detailed Description
This class that smooths cmd_vel velocities for robot bases.
Definition at line 41 of file velocity_smoother.hpp.
Constructor & Destructor Documentation
◆ VelocitySmoother()
|
explicit |
A constructor for nav2_velocity_smoother::VelocitySmoother.
- Parameters
-
options Additional options to control creation of the node.
Definition at line 32 of file velocity_smoother.cpp.
Member Function Documentation
◆ applyConstraints()
| double nav2_velocity_smoother::VelocitySmoother::applyConstraints | ( | const double | v_curr, |
| const double | v_cmd, | ||
| const double | accel, | ||
| const double | decel, | ||
| const double | eta | ||
| ) |
Apply acceleration and scale factor constraints.
- Parameters
-
v_curr current velocity v_cmd commanded velocity accel maximum acceleration decel maximum deceleration eta Scale factor
- Returns
- Velocity command
Definition at line 282 of file velocity_smoother.cpp.
Referenced by smootherTimer().

◆ dynamicParametersCallback()
|
protected |
Dynamic reconfigure callback.
- Parameters
-
parameters Parameter list to change
Definition at line 394 of file velocity_smoother.cpp.
References nav2_util::LifecycleNode::shared_from_this(), and smootherTimer().
Referenced by on_activate().


◆ findEtaConstraint()
| double nav2_velocity_smoother::VelocitySmoother::findEtaConstraint | ( | const double | v_curr, |
| const double | v_cmd, | ||
| const double | accel, | ||
| const double | decel | ||
| ) |
Find the scale factor, eta, which scales axis into acceleration range.
- Parameters
-
v_curr current velocity v_cmd commanded velocity accel maximum acceleration decel maximum deceleration
- Returns
- Scale factor, eta
Definition at line 251 of file velocity_smoother.cpp.
Referenced by smootherTimer().

◆ inputCommandCallback()
|
protected |
Callback for incoming velocity commands.
- Parameters
-
msg Twist message
Definition at line 243 of file velocity_smoother.cpp.
Referenced by on_configure().

◆ on_activate()
|
overrideprotected |
Activates member variables.
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
Definition at line 174 of file velocity_smoother.cpp.
References nav2_util::LifecycleNode::createBond(), dynamicParametersCallback(), and smootherTimer().

◆ on_cleanup()
|
overrideprotected |
Calls clean up states and resets member variables.
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
Definition at line 210 of file velocity_smoother.cpp.
Referenced by on_configure().

◆ on_configure()
|
overrideprotected |
Configures parameters and member variables.
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
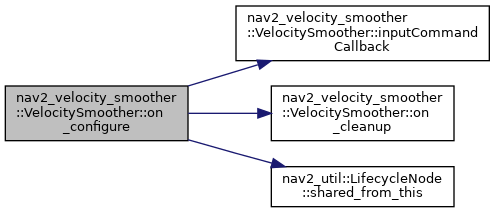
Definition at line 47 of file velocity_smoother.cpp.
References inputCommandCallback(), on_cleanup(), and nav2_util::LifecycleNode::shared_from_this().
◆ on_deactivate()
|
overrideprotected |
Deactivates member variables.
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
Definition at line 192 of file velocity_smoother.cpp.
References nav2_util::LifecycleNode::destroyBond().

◆ on_shutdown()
|
overrideprotected |
Called when in Shutdown state.
- Parameters
-
state LifeCycle Node's state
- Returns
- Success or Failure
Definition at line 220 of file velocity_smoother.cpp.
The documentation for this class was generated from the following files:
- nav2_velocity_smoother/include/nav2_velocity_smoother/velocity_smoother.hpp
- nav2_velocity_smoother/src/velocity_smoother.cpp