Navigator interface that acts as a base class for all BT-based Navigator action's plugins All methods from NavigatorBase are marked as final so they may not be overridden by derived methods - instead, users should use the appropriate APIs provided after BT Action handling. More...
#include <nav2_core/include/nav2_core/behavior_tree_navigator.hpp>
Public Types | |
| using | Ptr = std::shared_ptr< nav2_core::BehaviorTreeNavigator< ActionT > > |
Public Member Functions | |
| BehaviorTreeNavigator () | |
| A Navigator constructor. | |
| virtual | ~BehaviorTreeNavigator ()=default |
| Virtual destructor. | |
| bool | on_configure (rclcpp_lifecycle::LifecycleNode::WeakPtr parent_node, const std::vector< std::string > &plugin_lib_names, const FeedbackUtils &feedback_utils, nav2_core::NavigatorMuxer *plugin_muxer, std::shared_ptr< nav2_util::OdomSmoother > odom_smoother) final |
| Configuration to setup the navigator's backend BT and actions. More... | |
| bool | on_activate () final |
| Activation of the navigator's backend BT and actions. More... | |
| bool | on_deactivate () final |
| Deactivation of the navigator's backend BT and actions. More... | |
| bool | on_cleanup () final |
| Cleanup a navigator. More... | |
| virtual std::string | getDefaultBTFilepath (rclcpp_lifecycle::LifecycleNode::WeakPtr node)=0 |
| virtual std::string | getName ()=0 |
| Get the action name of this navigator to expose. More... | |
Protected Member Functions | |
| bool | onGoalReceived (typename ActionT::Goal::ConstSharedPtr goal) |
| An intermediate goal reception function to mux navigators. | |
| void | onCompletion (typename ActionT::Result::SharedPtr result, const nav2_behavior_tree::BtStatus final_bt_status) |
| An intermediate completion function to mux navigators. | |
| virtual bool | goalReceived (typename ActionT::Goal::ConstSharedPtr goal)=0 |
| A callback to be called when a new goal is received by the BT action server Can be used to check if goal is valid and put values on the blackboard which depend on the received goal. | |
| virtual void | onLoop ()=0 |
| A callback that defines execution that happens on one iteration through the BT Can be used to publish action feedback. | |
| virtual void | onPreempt (typename ActionT::Goal::ConstSharedPtr goal)=0 |
| A callback that is called when a preempt is requested. | |
| virtual void | goalCompleted (typename ActionT::Result::SharedPtr result, const nav2_behavior_tree::BtStatus final_bt_status)=0 |
| A callback that is called when a the action is completed; Can fill in action result message or indicate that this action is done. | |
| virtual bool | configure (rclcpp_lifecycle::LifecycleNode::WeakPtr, std::shared_ptr< nav2_util::OdomSmoother >) |
| virtual bool | cleanup () |
| Method to cleanup resources. | |
| virtual bool | activate () |
| Method to activate any threads involved in execution. | |
| virtual bool | deactivate () |
| Method to deactivate and any threads involved in execution. | |
Protected Attributes | |
| std::unique_ptr< nav2_behavior_tree::BtActionServer< ActionT > > | bt_action_server_ |
| rclcpp::Logger | logger_ {rclcpp::get_logger("Navigator")} |
| rclcpp::Clock::SharedPtr | clock_ |
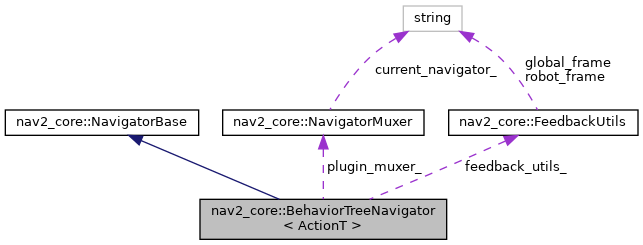
| FeedbackUtils | feedback_utils_ |
| NavigatorMuxer * | plugin_muxer_ |
Detailed Description
template<class ActionT>
class nav2_core::BehaviorTreeNavigator< ActionT >
Navigator interface that acts as a base class for all BT-based Navigator action's plugins All methods from NavigatorBase are marked as final so they may not be overridden by derived methods - instead, users should use the appropriate APIs provided after BT Action handling.
Definition at line 159 of file behavior_tree_navigator.hpp.
Member Function Documentation
◆ configure()
|
inlineprotectedvirtual |
- Parameters
-
Method to configure resources.
Reimplemented in nav2_bt_navigator::NavigateToPoseNavigator, and nav2_bt_navigator::NavigateThroughPosesNavigator.
Definition at line 357 of file behavior_tree_navigator.hpp.
Referenced by nav2_core::BehaviorTreeNavigator< ActionT >::on_configure().

◆ getName()
|
pure virtual |
Get the action name of this navigator to expose.
- Returns
- string Name of action to expose
Implemented in nav2_bt_navigator::NavigateToPoseNavigator, and nav2_bt_navigator::NavigateThroughPosesNavigator.
Referenced by nav2_core::BehaviorTreeNavigator< ActionT >::on_configure(), nav2_core::BehaviorTreeNavigator< ActionT >::onCompletion(), and nav2_core::BehaviorTreeNavigator< ActionT >::onGoalReceived().

◆ on_activate()
|
inlinefinalvirtual |
Activation of the navigator's backend BT and actions.
- Returns
- bool If successful
Implements nav2_core::NavigatorBase.
Definition at line 245 of file behavior_tree_navigator.hpp.
References nav2_core::BehaviorTreeNavigator< ActionT >::activate().

◆ on_cleanup()
|
inlinefinalvirtual |
Cleanup a navigator.
- Returns
- bool If successful
Implements nav2_core::NavigatorBase.
Definition at line 274 of file behavior_tree_navigator.hpp.
References nav2_core::BehaviorTreeNavigator< ActionT >::cleanup().

◆ on_configure()
|
inlinefinalvirtual |
Configuration to setup the navigator's backend BT and actions.
- Parameters
-
parent_node The ROS parent node to utilize plugin_lib_names a vector of plugin shared libraries to load feedback_utils Some utilities useful for navigators to have plugin_muxer The muxing object to ensure only one navigator can be active at a time odom_smoother Object to get current smoothed robot's speed
- Returns
- bool If successful
Implements nav2_core::NavigatorBase.
Definition at line 188 of file behavior_tree_navigator.hpp.
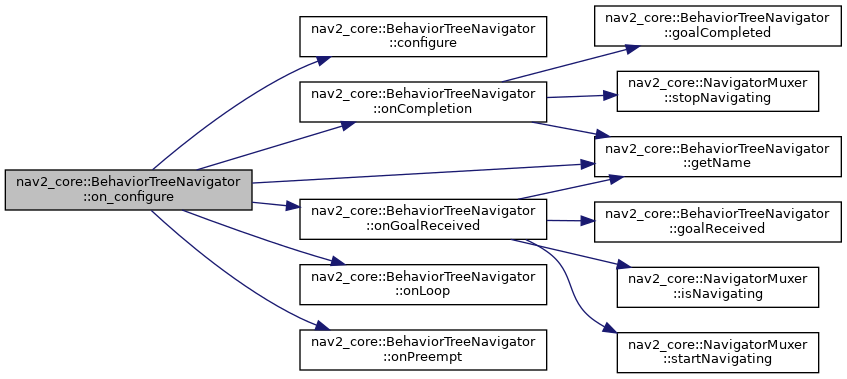
References nav2_core::BehaviorTreeNavigator< ActionT >::configure(), nav2_core::BehaviorTreeNavigator< ActionT >::getName(), nav2_core::BehaviorTreeNavigator< ActionT >::onCompletion(), nav2_core::BehaviorTreeNavigator< ActionT >::onGoalReceived(), nav2_core::BehaviorTreeNavigator< ActionT >::onLoop(), and nav2_core::BehaviorTreeNavigator< ActionT >::onPreempt().
◆ on_deactivate()
|
inlinefinalvirtual |
Deactivation of the navigator's backend BT and actions.
- Returns
- bool If successful
Implements nav2_core::NavigatorBase.
Definition at line 260 of file behavior_tree_navigator.hpp.
References nav2_core::BehaviorTreeNavigator< ActionT >::deactivate().

The documentation for this class was generated from the following file:
- nav2_core/include/nav2_core/behavior_tree_navigator.hpp