Collision Monitor ROS2 node. More...
#include <nav2_collision_monitor/include/nav2_collision_monitor/collision_monitor_node.hpp>
Public Member Functions | |
| CollisionMonitor (const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| Constructor for the nav2_collision_monitor::CollisionMonitor. More... | |
| ~CollisionMonitor () | |
| Destructor for the nav2_collision_monitor::CollisionMonitor. | |
 Public Member Functions inherited from nav2_util::LifecycleNode Public Member Functions inherited from nav2_util::LifecycleNode | |
| LifecycleNode (const std::string &node_name, const std::string &ns="", const rclcpp::NodeOptions &options=rclcpp::NodeOptions()) | |
| A lifecycle node constructor. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has no integer or floating point range constraints. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const floating_point_range fp_range, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has a floating point range constraint. More... | |
| void | add_parameter (const std::string &name, const rclcpp::ParameterValue &default_value, const integer_range int_range, const std::string &description="", const std::string &additional_constraints="", bool read_only=false) |
| Declare a parameter that has an integer range constraint. More... | |
| std::shared_ptr< nav2_util::LifecycleNode > | shared_from_this () |
| Get a shared pointer of this. | |
| nav2_util::CallbackReturn | on_error (const rclcpp_lifecycle::State &) |
| Abstracted on_error state transition callback, since unimplemented as of 2020 in the managed ROS2 node state machine. More... | |
| void | autostart () |
| Automatically configure and active the node. | |
| virtual void | on_rcl_preshutdown () |
| Perform preshutdown activities before our Context is shutdown. Note that this is related to our Context's shutdown sequence, not the lifecycle node state machine. | |
| void | createBond () |
| Create bond connection to lifecycle manager. | |
| void | destroyBond () |
| Destroy bond connection to lifecycle manager. | |
Protected Member Functions | |
| nav2_util::CallbackReturn | on_configure (const rclcpp_lifecycle::State &state) override |
| : Initializes and obtains ROS-parameters, creates main subscribers and publishers, creates polygons and data sources objects More... | |
| nav2_util::CallbackReturn | on_activate (const rclcpp_lifecycle::State &state) override |
| : Activates LifecyclePublishers, polygons and main processor, creates bond connection More... | |
| nav2_util::CallbackReturn | on_deactivate (const rclcpp_lifecycle::State &state) override |
| : Deactivates LifecyclePublishers, polygons and main processor, destroys bond connection More... | |
| nav2_util::CallbackReturn | on_cleanup (const rclcpp_lifecycle::State &state) override |
| : Resets all subscribers/publishers, polygons/data sources arrays More... | |
| nav2_util::CallbackReturn | on_shutdown (const rclcpp_lifecycle::State &state) override |
| Called in shutdown state. More... | |
| void | cmdVelInCallbackStamped (geometry_msgs::msg::TwistStamped::SharedPtr msg) |
| Callback for input cmd_vel. More... | |
| void | cmdVelInCallbackUnstamped (geometry_msgs::msg::Twist::SharedPtr msg) |
| void | publishVelocity (const Action &robot_action, const std_msgs::msg::Header &header) |
| Publishes output cmd_vel. If robot was stopped more than stop_pub_timeout_ seconds, quit to publish 0-velocity. More... | |
| bool | getParameters (std::string &cmd_vel_in_topic, std::string &cmd_vel_out_topic, std::string &state_topic) |
| Supporting routine obtaining all ROS-parameters. More... | |
| bool | configurePolygons (const std::string &base_frame_id, const tf2::Duration &transform_tolerance) |
| Supporting routine creating and configuring all polygons. More... | |
| bool | configureSources (const std::string &base_frame_id, const std::string &odom_frame_id, const tf2::Duration &transform_tolerance, const rclcpp::Duration &source_timeout, const bool base_shift_correction) |
| Supporting routine creating and configuring all data sources. More... | |
| void | process (const Velocity &cmd_vel_in, const std_msgs::msg::Header &header) |
| Main processing routine. More... | |
| bool | processStopSlowdownLimit (const std::shared_ptr< Polygon > polygon, const std::unordered_map< std::string, std::vector< Point >> &sources_collision_points_map, const Velocity &velocity, Action &robot_action) const |
| Processes the polygon of STOP, SLOWDOWN and LIMIT action type. More... | |
| bool | processApproach (const std::shared_ptr< Polygon > polygon, const std::unordered_map< std::string, std::vector< Point >> &sources_collision_points_map, const Velocity &velocity, Action &robot_action) const |
| Processes APPROACH action type. More... | |
| void | notifyActionState (const Action &robot_action, const std::shared_ptr< Polygon > action_polygon) const |
| Log and publish current robot action and polygon. More... | |
| void | publishPolygons () const |
| Polygons publishing routine. Made for visualization. | |
| Protected Member Functions inherited from nav2_util::LifecycleNode | |
| void | printLifecycleNodeNotification () |
| Print notifications for lifecycle node. | |
| void | register_rcl_preshutdown_callback () |
| void | runCleanups () |
Protected Attributes | |
| std::shared_ptr< tf2_ros::Buffer > | tf_buffer_ |
| TF buffer. | |
| std::shared_ptr< tf2_ros::TransformListener > | tf_listener_ |
| TF listener. | |
| std::vector< std::shared_ptr< Polygon > > | polygons_ |
| Polygons array. | |
| std::vector< std::shared_ptr< Source > > | sources_ |
| Data sources array. | |
| std::unique_ptr< nav2_util::TwistSubscriber > | cmd_vel_in_sub_ |
| Input cmd_vel subscriber. | |
| std::unique_ptr< nav2_util::TwistPublisher > | cmd_vel_out_pub_ |
| Output cmd_vel publisher. | |
| rclcpp_lifecycle::LifecyclePublisher< nav2_msgs::msg::CollisionMonitorState >::SharedPtr | state_pub_ |
| CollisionMonitor state publisher. | |
| rclcpp_lifecycle::LifecyclePublisher< visualization_msgs::msg::MarkerArray >::SharedPtr | collision_points_marker_pub_ |
| Collision points marker publisher. | |
| bool | process_active_ |
| Whether main routine is active. | |
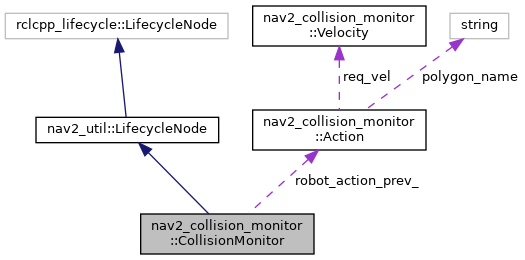
| Action | robot_action_prev_ |
| Previous robot action. | |
| rclcpp::Time | stop_stamp_ |
| Latest timestamp when robot has 0-velocity. | |
| rclcpp::Duration | stop_pub_timeout_ |
| Timeout after which 0-velocity ceases to be published. | |
| Protected Attributes inherited from nav2_util::LifecycleNode | |
| std::unique_ptr< rclcpp::PreShutdownCallbackHandle > | rcl_preshutdown_cb_handle_ {nullptr} |
| std::shared_ptr< bond::Bond > | bond_ {nullptr} |
| double | bond_heartbeat_period |
| rclcpp::TimerBase::SharedPtr | autostart_timer_ |
Detailed Description
Collision Monitor ROS2 node.
Definition at line 53 of file collision_monitor_node.hpp.
Constructor & Destructor Documentation
◆ CollisionMonitor()
|
explicit |
Constructor for the nav2_collision_monitor::CollisionMonitor.
- Parameters
-
options Additional options to control creation of the node.
Definition at line 31 of file collision_monitor_node.cpp.
Member Function Documentation
◆ cmdVelInCallbackStamped()
|
protected |
Callback for input cmd_vel.
- Parameters
-
msg Input cmd_vel message
Definition at line 188 of file collision_monitor_node.cpp.
◆ configurePolygons()
|
protected |
Supporting routine creating and configuring all polygons.
- Parameters
-
base_frame_id Robot base frame ID transform_tolerance Transform tolerance
- Returns
- True if all polygons were configured successfully or false in failure case
Definition at line 289 of file collision_monitor_node.cpp.
◆ configureSources()
|
protected |
Supporting routine creating and configuring all data sources.
- Parameters
-
base_frame_id Robot base frame ID odom_frame_id Odometry frame ID. Used as global frame to get source->base time interpolated transform. transform_tolerance Transform tolerance source_timeout Maximum time interval in which data is considered valid base_shift_correction Whether to correct source data towards to base frame movement, considering the difference between current time and latest source time
- Returns
- True if all sources were configured successfully or false in failure case
Definition at line 339 of file collision_monitor_node.cpp.
◆ getParameters()
|
protected |
Supporting routine obtaining all ROS-parameters.
- Parameters
-
cmd_vel_in_topic Output name of cmd_vel_in topic cmd_vel_out_topic Output name of cmd_vel_out topic is required. state_topic topic name for publishing collision monitor state
- Returns
- True if all parameters were obtained or false in failure case
Definition at line 230 of file collision_monitor_node.cpp.
◆ notifyActionState()
|
protected |
Log and publish current robot action and polygon.
- Parameters
-
robot_action Robot action to notify action_polygon Pointer to a polygon causing a selected action
Definition at line 605 of file collision_monitor_node.cpp.
◆ on_activate()
|
overrideprotected |
: Activates LifecyclePublishers, polygons and main processor, creates bond connection
- Parameters
-
state Lifecycle Node's state
- Returns
- Success or Failure
Definition at line 103 of file collision_monitor_node.cpp.
◆ on_cleanup()
|
overrideprotected |
: Resets all subscribers/publishers, polygons/data sources arrays
- Parameters
-
state Lifecycle Node's state
- Returns
- Success or Failure
Definition at line 162 of file collision_monitor_node.cpp.
◆ on_configure()
|
overrideprotected |
: Initializes and obtains ROS-parameters, creates main subscribers and publishers, creates polygons and data sources objects
- Parameters
-
state Lifecycle Node's state
- Returns
- Success or Failure
Definition at line 45 of file collision_monitor_node.cpp.
◆ on_deactivate()
|
overrideprotected |
: Deactivates LifecyclePublishers, polygons and main processor, destroys bond connection
- Parameters
-
state Lifecycle Node's state
- Returns
- Success or Failure
Definition at line 133 of file collision_monitor_node.cpp.
◆ on_shutdown()
|
overrideprotected |
Called in shutdown state.
- Parameters
-
state Lifecycle Node's state
- Returns
- Success or Failure
Definition at line 181 of file collision_monitor_node.cpp.
◆ process()
|
protected |
Main processing routine.
- Parameters
-
cmd_vel_in Input desired robot velocity header Twist header
Definition at line 406 of file collision_monitor_node.cpp.
◆ processApproach()
|
protected |
Processes APPROACH action type.
- Parameters
-
polygon Polygon to process sources_collision_points_map Map containing source name as key and array of source's 2D obstacle points as value velocity Desired robot velocity robot_action Output processed robot action
- Returns
- True if returned action is caused by current polygon, otherwise false
Definition at line 576 of file collision_monitor_node.cpp.
◆ processStopSlowdownLimit()
|
protected |
Processes the polygon of STOP, SLOWDOWN and LIMIT action type.
- Parameters
-
polygon Polygon to process sources_collision_points_map Map containing source name as key and array of source's 2D obstacle points as value velocity Desired robot velocity robot_action Output processed robot action
- Returns
- True if returned action is caused by current polygon, otherwise false
Definition at line 517 of file collision_monitor_node.cpp.
◆ publishVelocity()
|
protected |
Publishes output cmd_vel. If robot was stopped more than stop_pub_timeout_ seconds, quit to publish 0-velocity.
- Parameters
-
robot_action Robot action to publish header TwistStamped header to use
Definition at line 206 of file collision_monitor_node.cpp.
The documentation for this class was generated from the following files:
- nav2_collision_monitor/include/nav2_collision_monitor/collision_monitor_node.hpp
- nav2_collision_monitor/src/collision_monitor_node.cpp