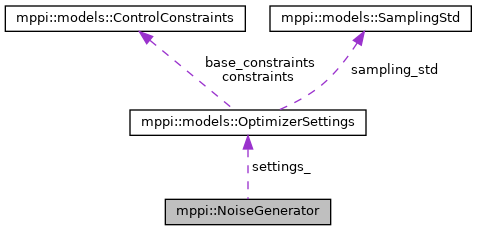
Generates noise trajectories from optimal trajectory. More...
#include <nav2_mppi_controller/include/nav2_mppi_controller/tools/noise_generator.hpp>
Public Member Functions | |
| NoiseGenerator ()=default | |
| Constructor for mppi::NoiseGenerator. | |
| void | initialize (mppi::models::OptimizerSettings &settings, bool is_holonomic, const std::string &name, ParametersHandler *param_handler) |
| Initialize noise generator with settings and model types. More... | |
| void | shutdown () |
| Shutdown noise generator thread. | |
| void | generateNextNoises () |
| Signal to the noise thread the controller is ready to generate a new noised control for the next iteration. | |
| void | setNoisedControls (models::State &state, const models::ControlSequence &control_sequence) |
| set noised control_sequence to state controls More... | |
| void | reset (mppi::models::OptimizerSettings &settings, bool is_holonomic) |
| Reset noise generator with settings and model types. More... | |
Protected Member Functions | |
| void | noiseThread () |
| Thread to execute noise generation process. | |
| void | generateNoisedControls () |
| Generate random controls by gaussian noise with mean in control_sequence_. More... | |
Protected Attributes | |
| Eigen::ArrayXXf | noises_vx_ |
| Eigen::ArrayXXf | noises_vy_ |
| Eigen::ArrayXXf | noises_wz_ |
| std::default_random_engine | generator_ |
| std::normal_distribution< float > | ndistribution_vx_ |
| std::normal_distribution< float > | ndistribution_wz_ |
| std::normal_distribution< float > | ndistribution_vy_ |
| mppi::models::OptimizerSettings | settings_ |
| bool | is_holonomic_ |
| std::thread | noise_thread_ |
| std::condition_variable | noise_cond_ |
| std::mutex | noise_lock_ |
| bool | active_ {false} |
| bool | ready_ {false} |
| bool | regenerate_noises_ {false} |
Detailed Description
Generates noise trajectories from optimal trajectory.
Definition at line 39 of file noise_generator.hpp.
Member Function Documentation
◆ generateNoisedControls()
|
protected |
Generate random controls by gaussian noise with mean in control_sequence_.
- Returns
- tensor of shape [ batch_size_, time_steps_, 2] where 2 stands for v, w
Definition at line 108 of file noise_generator.cpp.
Referenced by initialize(), noiseThread(), and reset().

◆ initialize()
| void mppi::NoiseGenerator::initialize | ( | mppi::models::OptimizerSettings & | settings, |
| bool | is_holonomic, | ||
| const std::string & | name, | ||
| ParametersHandler * | param_handler | ||
| ) |
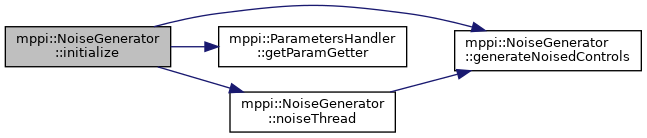
Initialize noise generator with settings and model types.
- Parameters
-
settings Settings of controller is_holonomic If base is holonomic name Namespace for configs param_handler Get parameters util
Definition at line 23 of file noise_generator.cpp.
References generateNoisedControls(), mppi::ParametersHandler::getParamGetter(), and noiseThread().
Referenced by mppi::Optimizer::initialize().

◆ reset()
| void mppi::NoiseGenerator::reset | ( | mppi::models::OptimizerSettings & | settings, |
| bool | is_holonomic | ||
| ) |
Reset noise generator with settings and model types.
- Parameters
-
settings Settings of controller is_holonomic If base is holonomic
Definition at line 77 of file noise_generator.cpp.
References generateNoisedControls().
Referenced by mppi::Optimizer::reset().


◆ setNoisedControls()
| void mppi::NoiseGenerator::setNoisedControls | ( | models::State & | state, |
| const models::ControlSequence & | control_sequence | ||
| ) |
set noised control_sequence to state controls
- Returns
- noises vx, vy, wz
Definition at line 66 of file noise_generator.cpp.
Referenced by mppi::Optimizer::generateNoisedTrajectories().

The documentation for this class was generated from the following files:
- nav2_mppi_controller/include/nav2_mppi_controller/tools/noise_generator.hpp
- nav2_mppi_controller/src/noise_generator.cpp